Навигация
Исследование динамических свойств электропривода с вентильным двигателем
35976
знаков
2
таблицы
34
изображения
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ ЭЛЕКТРОПРИВОДА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ
Выполнил
Михайлов Н.В
Руководитель
профессор Суровцев В.Н
2008
Содержание
1. Введение
2. Исходные данные для проектирования
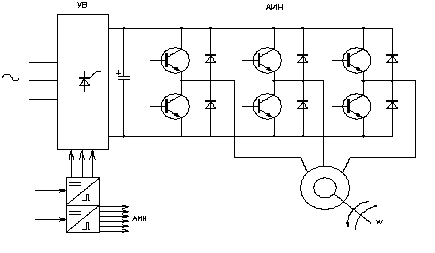
3. Краткое описание функциональной схемы
4. Синтез контура тока
5. Синтез контура скорости
6. Моделирование вентильного двигателя
6.1 Датчик положения ротора
6.2 Релейный регулятор тока RRT
6.3 Инвертор напряжения
7. Анализ динамических свойств виртуальной модели вентильного двигателя.
8. Бездатчиковое определение скорости вентильного двигателя
9. Заключение
10. Список использованной литературы.
1. Введение
Вентильный электродвигатель – это тип синхронной машины, реализованный в замкнутой системе с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя. Часто их также называют бесконтактными двигателями постоянного тока или обращенной машиной постоянного тока. Этот тип двигателя создан с целью улучшения свойств двигателей постоянного тока.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре. Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор.
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД частота вращения поля пропорциональна частоте вращения ротора, которая зависит от напряжения питания.
Статор.
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Обычно это трехфазные, реже четырехфазные двигатели.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной и синусоидальной формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор.
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале использовались ферритовые магниты для изготовления ротора. Они распространены и дешевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты редкоземельных сплавов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
В двигателях большой мощности вместо постоянного магнита на роторе используется электромагнит. Напряжение питания к нему подается через контактные кольца установленные на роторе.
Датчик положения ротора.
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора, выполняет ту же функцию, что и коллектор в двигателе постоянного тока. Его работа может быть основана на разных принципах – фотоэлектрический, индуктивный, на эффекте Холла, и т.д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безынерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприемника, которые поочередно закрываются шторкой вращающейся синхронно с ротором. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих импульсов, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трех обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 1200 и их начала и концы соединены так, что при переключении ключей создается вращающееся магнитное поле.
2. Исходные данные для проектированияДля дальнейшего исследования в качестве исследуемого двигателя примем высокомоментный двигатель ДВУ2М215М-Ф мощностью 3 кВт и частотой вращения 3000 об/мин., характеристики которого представлены в таблице №1.
Условное обозначение двигателя серии ДВУ: ДВУ — двигатель вентильный управляемый, где 215 — диаметр окружности расположения центров отверстий на крепительном фланце; М—условная длина сердечника статора.
Таблица №1.
| Тип двигателя ДВУ2М215М-Ф[1] (для приводов подачи станков) | |||
| Максимальная частота вращения nmax, об/мин | 3000 | Электромеханическая пост. времени Тм, мс | 4,1 |
| Вращающий момент при nmax М, Нм | 40 | Электромагнитная пост. времени Те, мс | 16,4 |
| Номинальный момент при n=500 об/мин Мdo, Нм | 47 | Тепловая постоянная времени Тт, мин | 80 |
| Длительный момент при n=0 Мо, Нм | 48 | Постоянная вращ. момента при 20С0 Км,Нм/А | 1,37 |
| Номинальный ток фазы при 20С0 Ido, А | 36 | Сопротивление фазы при 20С0 Rф, Ом | 0,095 |
| Максимальный ток Imax, A | 95 | Индуктивность 2-х фаз последовательно L, мГн | 3,1 |
| Масса двигателя исполнение Т1, кг | 57 | Момент инерции ротора J, кгм2 | 0.0225 |
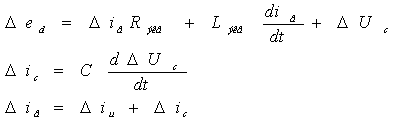
Рассчитаем параметры элементов силовой цепи.
Эквивалентное активное сопротивление двух фаз статора двигателя, включенных последовательно:
Rэ=Rдв =2 Rф = 2*0,095 = 0,19 Ом.
Индуктивность двух фаз статора двигателя:
Lдв =3,1 мГн.
Электромагнитная постоянная времени якорной цепи:
![]() .
.
Номинальная скорость вращения двигателя:
![]() .
.
Суммарный момент инерции привода:
![]() .
.
Механическая постоянная времени:
![]() .
.
Коэффициент обратной связи по скорости:
![]() , примем
, примем ![]()
Коэффициент обратной связи по току:
Зададимся условиями ограничения параметров системы и примем
![]()
![]()
С учетом этих условий примем коэффициент обратной связи по току:
![]()
Примем km=0.1.
![]() - коэффициенты пропорциональности между током и моментом; между угловой скоростью и ЭДС.
- коэффициенты пропорциональности между током и моментом; между угловой скоростью и ЭДС.
![]() - коэффициент передачи преобразователя.
- коэффициент передачи преобразователя.
![]() - число пар полюсов.
- число пар полюсов.
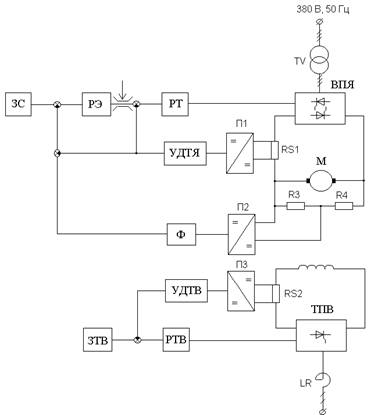
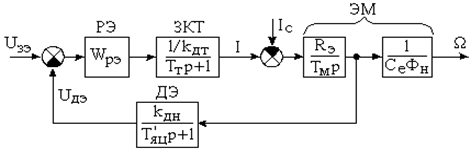
3. Краткое описание функциональной схемы
Для осуществления автоматического регулирования необходимо измерить сигнал обратной связи, затем этот результат в виде напряжения сравнить (произвести алгебраическое суммирование) с заданным в виде напряжения значением регулируемой величины и направить результат сравнения регулируемому объекту. Обычно энергии измерительного органа оказывается недостаточно для воздействия на объект регулирования, поэтому возникает необходимость в применении усилительного устройства.
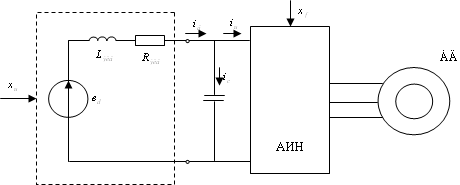
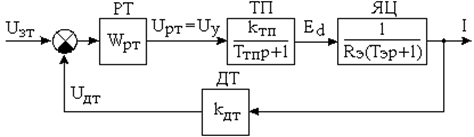
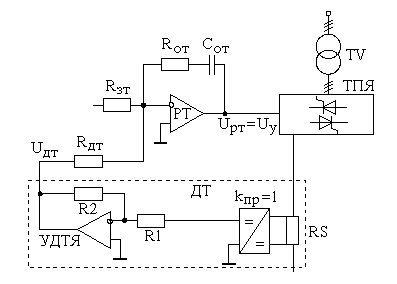
Регулятор тока якоря получает на вход сигнал задания ![]() с выхода регулятора скорости и сигнал обратной связи
с выхода регулятора скорости и сигнал обратной связи ![]() с выхода датчика тока. На выходе он формирует напряжение управления
с выхода датчика тока. На выходе он формирует напряжение управления ![]() . Сигнал обратной связи по току снимается с датчика на основе трансформаторов тока, установленных на стороне переменного тока. Датчик тока осуществляет гальваническое разделение цепей управления от главных цепей и усиление по напряжению.
. Сигнал обратной связи по току снимается с датчика на основе трансформаторов тока, установленных на стороне переменного тока. Датчик тока осуществляет гальваническое разделение цепей управления от главных цепей и усиление по напряжению.
На регулятор тока (РТ) возлагаются также другие функции:
1. Установка задания на переключение соответствующих пар транзисторов в зависимости от разности сигналов задания тока и обратной связи по току.
2. Обеспечение режима торможения электродвигателя.
В системах подчиненного регулирования выходной сигнал регулятора скорости является сигналом задания тока ![]() для регулятора тока.
для регулятора тока.
На регулятор скорости и связанные с ним узлы возлагаются дополнительные задачи:
1. Ограничение сигнала ![]() допустимым значением, которое может зависеть от значения потока двигателя Ф,
допустимым значением, которое может зависеть от значения потока двигателя Ф,
2. Ограничение скорости изменения тока di/dt,
3. Формирование требуемой жесткости механических характеристик электропривода,
4. Прием сигналов задания скорости двигателя,
5. Обеспечение изменения ЭД с определенным ускорением и др.
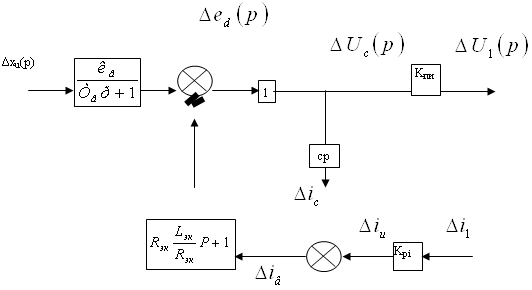
4. Синтез контура тока
Для обеспечения желаемых динамических характеристик привода примем в качестве регулирующих устройств в контуре тока релейные элементы на каждую фазу двигателя. Используя безынерционные свойства реле, можно настроить систему регулирования на предельное быстродействие, зависящее от параметров контура скорости. Наличие релейных элементов приводит в существенной нелинейности всей системы в целом. Если не принять соответствующих предосторожностей, то автоколебания, возникающие в релейной автоматической системе, приводят к столь значительному изменению выходной величины линейной части, что релейная система становится неработоспособной.
Для уменьшения изменения выходной величины необходимо либо устранить автоколебания, либо увеличить частоту возможных автоколебаний. Последнее следует из того, что модуль частотной характеристики линейной части системы ![]() обычно с ростом частоты стремится к нулю и, следовательно, чем выше будет частота автоколебаний, тем будет меньше изменение выходной величины [2].
обычно с ростом частоты стремится к нулю и, следовательно, чем выше будет частота автоколебаний, тем будет меньше изменение выходной величины [2].
В связи с этим важное значение приобретают способы увеличения частоты колебаний или, если это возможно, устранения этих колебаний.
Способы повышения частоты автоколебаний:
1. Уменьшение гистерезиса b реле. При этом прямая –b , параллельная оси абсцисс, приближается к действительной оси, точка пересечения частотной характеристики релейной автоматической системы ![]() и прямой b смещается вверх. Увеличивается частота автоколебаний, уменьшается их амплитуда.
и прямой b смещается вверх. Увеличивается частота автоколебаний, уменьшается их амплитуда.
Недостаток: Невозможно получить частоты автоколебаний выше частоты ![]() , получаемой при нулевой петле гистерезиса b = 0.
, получаемой при нулевой петле гистерезиса b = 0.
2. Введение отрицательного гистерезиса b. Изменяется направление переключений, прямая –b пройдет выше оси абсцисс, частоты автоколебаний увеличиваются ![]() .
.
Похожие работы
... равное отношению угловой частоты ЭДС ротора Ω2 (приведенной к двухполюсному электродвигателю) к номинальному значению угловой частоты напряжения статора Ω1н. . Структурная схема асинхронного электродвигателя при управлении напряжением статора показана на рис. 2. Рис.2. 2.3 Статические характеристики САУ на основе АД 2.3.1 Статические характеристики САУ при Для ...
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...
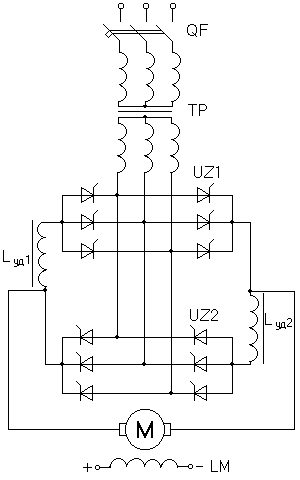
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
0 комментариев