Навигация
Одночастотные когерентно - импульсные РЛС
17521
знак
0
таблиц
7
изображений
2. Одночастотные когерентно - импульсные РЛС
При когерентных методах непрерывного излучения в качестве опорного сигнала можно использовать сигнал генератора высокой частоты. В когерентно - импульсном методе такой возможности нет, ибо генератор радиочастоты работает в импульсном режиме. Таким образом, в паузе между зондирующими импульсами необходим дополнительный источник опорного сигнала. Для этого обычно применяется когерентный генератор или гетеродин, работающий в режиме фазовой синхронизации с генератором радиочастоты.
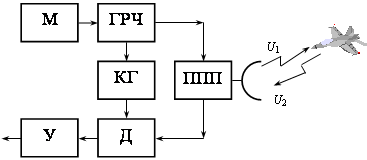 Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U2 имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U2 имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Рис. 1. Структурная схема когерентно-импульсной РЛС
Рассматривая только выходное напряжение детектора, которое после фильтрации является чисто импульсным, можно получить следующие зависимости [1] для сигналов движущейся и неподвижной целей:
 (1.1)
(1.1)
(1.2)
![]() где
где
сигнал неподвижной цели; Um дц - амплитуда сигнала движущейся цели; М = Um дц /Um2 нц - коэффициент модуляции сигнала биений.
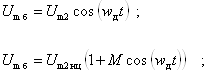
 Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Рис. 2. Спектральный состав видеоимпульсов на выходе детектора
Сравнивая импульсы движущихся и неподвижных целей, можно сделать заключение, что основным отличием временных функций, соответствующих этим последовательностям, будет наличие переменной составляющей в сигнале движущейся цели. Переходя к спектральным представлениям, можно утверждать, что спектр немодулированных видеоимпульсов, соответствующих функции времени f1(t), будет состоять лишь из гармоник частоты повторения (рис. 2, а). Спектр знакопеременной последовательности модулированных видеоимпульсов, соответствующих функции времени f2(t), будет состоять из гармоник nFп ± Fм (рис. 2 б). Наконец, спектр последовательности видеоимпульсов, соответствующих функции времени fS(t)= f1(t)+ f2(t), будет состоять из гармоник nFп и nFп ± Fм (рис. 2 в).
Следовательно, для селекции движущихся целей необходимо компенсировать на выходе элемента сравнения импульсные последовательности с постоянной амплитудой или подавлять в спектре сигнала после элемента сравнения все гармоники частоты повторения nFп.
Однако при построении устройств селекции движущихся целей в когерентно-импульсных РЛС следует учитывать наличие так называемого стробоскопического эффекта.
Запишем выражение (1.2) с учетом фильтрации постоянной составляющей:
![]()
Очевидно, что это выражение будет однозначной функцией п только в пределах однозначности функции косинуса его аргумента. Поэтому можно считать, что для однозначной связи Umб и n необходимо, чтобы
![]()
Это соотношение должно выполняться для любого п. Поэтому, полагая п = 2, получаем пределы однозначного соответствия частоты биений импульсной последовательности частоте Доплера
![]()
При увеличении fд > Fп/2 за счет периодичности косинуса получаем периодическое повторение указанного соответствия.
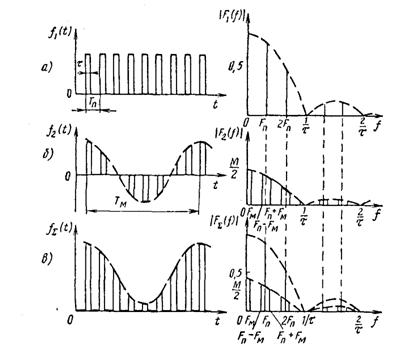
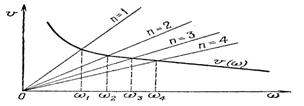
На рис. 3 показана зависимость частоты биений от частоты Доплера. Видно, что в случае, когда частота Доплера кратна частоте повторения, последовательность импульсов оказывается немодулированной, так как fб =0.
Рис. 3. Зависимость частоты биений от частоты Доплера
С учетом этого и выражение для значения частоты Доплера получаем
![]()
Таким образом, модуляция импульсов движущейся цели отсутствует, а следовательно, сигналы движущейся и неподвижной целей при радиальных скоростях, удовлетворяющих условию (1.3), не различаются. Эти скорости называются «слепыми». Цель, двигающаяся с одной из «слепых» скоростей, за период повторения приближается или удаляется от радиолокатора на расстояние, кратное целому числу половины длины волны несущего колебания радиолокатора. При этом разность фаз прямого и отраженного сигналов за период повторения будет изменяться на величину, кратную 2p.
Способ построения когерентно-импульсных систем селекции выбирается в зависимости от соотношения параметров импульсной модуляции. Обычно различают когерентно-импульсные РЛС, работающие в режимах малой и высокой скважности. Естественно, граница разделения весьма условна и соответствует значению скважности Q = 10. При Q < 10 имеем режим малой скважности, а при Q > 10 - большой скважности [1].
Основным преимуществом когерентно-импульсной РЛС, работающей в режиме высокой скважности, является высокая разрешающая способность по дальности.
Различают истинно когерентные и псевдокогерентные РЛС, которые часто называют также когерентными РЛС селекции движущихся целей. Различие этих систем заключается в способе построения передающего
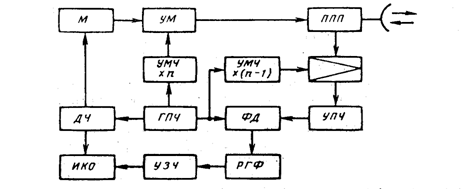
Рис. 4. Структурная схемы истинно когерентной РЛС высокой скважности
устройства и способе получения опорного когерентного напряжения, что приводит к различному интервалу когерентности сигналов РЛС.
На рис. 4 приведен пример схемы истинно когерентной РЛС высокой скважности. Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора промежуточной частоты (ГПЧ) умножаются по частоте и усиливаются в усилителе мощности (УМ). Одновременно в этом же каскаде происходит импульсная модуляция сигнала с высокой скважностью и частотой повторения, зависящей от модулятора (М). С помощью второго умножителя частоты (УМЧ), на который подаются колебания задающего генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых сигналов в смесителе приемника. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на фазовом детекторе (ФД).
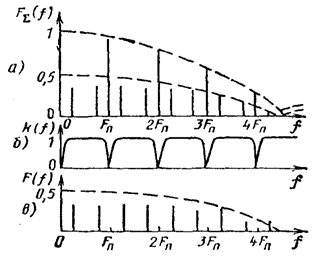
Рис. 5. Спектры сигналов на входе, выходе РГФ и его АЧХ
Сигнал биений в виде модулированной или немодулированной последовательности видеоимпульса подается на режекторный гребенчатый фильтр (РГФ), который селектирует сигналы движущихся целей и подавляет все составляющие частоты повторения. После усиления сигналы движущихся целей подаются на индикатор кругового обзора (ИКО), где и происходит их обнаружение. На рис. 5 показаны спектры сигналов на входе и выходе РГФ, а также амплитудно-частотная характеристика этого фильтра.
На рис. 6 приведен пример схемы псевдокогерентной РЛС, работающей в режиме высокой скважности. При таком построении используются однокаскадные передатчики. Генератор радиочастоты (ГРЧ) работает в режиме самовозбуждения при модуляции импульсами высокой скважности. Опорный когерентный сигнал формируется КГ, который синхронизируется по фазе импульсами генератора радиочастоты, предварительно преобразованными на промежуточную частоту, так как когерентный гетеродин работает на промежуточной частоте. Принятые сигналы сравниваются с опорным также на промежуточной частоте в фазовом детекторе (ФД).
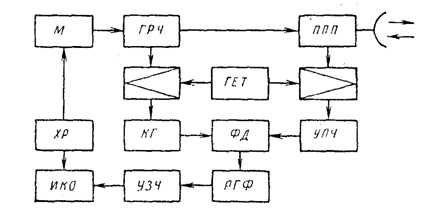
Рис. 6. Схема псевдокогерентной РЛС высокой скважности
импульс детектор радиоэлектронный
Особенностью псевдокогерентных РЛС является малый интервал когерентности сигнала, равный одному периоду повторения. Это объясняется тем, что колебания генератора радиочастоты имеют случайную начальную фазу от импульса к импульсу или от периода к периоду повторения Следовательно, спектр таких импульсов является сплошным. Поэтому фазовая синхронизация осуществляется импульсом ГРЧ в начале каждого периода повторения и когерентность колебаний ГРЧ и опорного сигнала КГ сохраняется лишь на этот период повторения. То же повторяется и в каждом следующем периоде. В двух соседних периодах или в двух любых периодах повторения когерентность колебаний отсутствует, поэтому РЛС и называется псевдокогерентной.
Заключение
Радиолокация представляет собой средство расширения возможностей человека определять наличие и положение объектов за счет использования явлений отражения радиоволн этими объектами. Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства. Хотя световые волны также являются электромагнитными, но в радиолокации частота их намного ниже. Это позволяет применять радиотехнические методы и схемы.
Развитие радиолокации явилось важной частью технической революции двадцатого века. Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в указанной области.
Список литературы
1) Перминов И.Г. «Физические основы получения информации». 2006 год.
2) Артамонов В.М. «Электроавтоматика судовых и самолетных радиолокационных станций». 1962 год.
3) Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов.радио, 1969г.-704стр.
4) Дулевич В.Е. Теоретические основы радиолокации. М., Сов.радио, 1978г. – 608стр.
5) Ширман Я.Д. Теоретические основы радиолокации. М., Сов.радио, 1970г. – 560стр.
Похожие работы
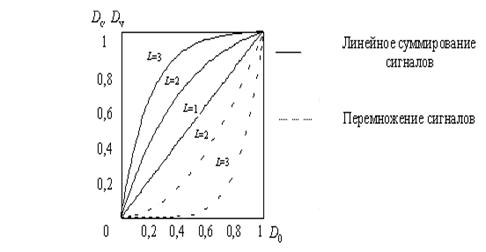
... соотношения импульсов с разными несущими частотами от 1:1 (равномерное распределение частот) до 1 : 5 потери в пороговом отношении сигнал/шум составляют не более 1 дБ. Наименее помехозащищенными являются многочастотные РЛС с линейным суммированием сигналов. Для их подавления достаточно создать эффективную помеху на одной из рабочих частот РЛС. Помеха по соответствующему частотному каналу ...
... – 3 0,1; 0,2; 0,4; 1; 2; 4 N8974A 0,01 – 6.7 0,1; 0,2; 0,4; 1; 2; 4 N8975A 0,01 – 26.5 0,1; 0,2; 0,4; 1; 2; 4 Таблица 4.3 - Технические особенности ИКШ серии NFА Структурная схема измерителя коэффициента шума N8973A представлена на рисунке 4.4. Рисунок 4.4 - Структурная схема ИКШ N8973A В преобразователе частот (блок радиоприемного тракта) спектр входного сигнала сначала ...
... предусмотренном РФ. Назначение радиосвязи МПС и МПСС: 1. обеспечение безопасности мореплавания и охрана человеческой жизни на море 2. обеспечение оперативно-диспетчерского руководства работой флота; экспедиций и организаций, непосредственно связанной с эксплуатацией морских судов 3. передача данных для автоматизированных систем управления 4. обмен официальной корреспонденцией 5. обмен ...
0 комментариев