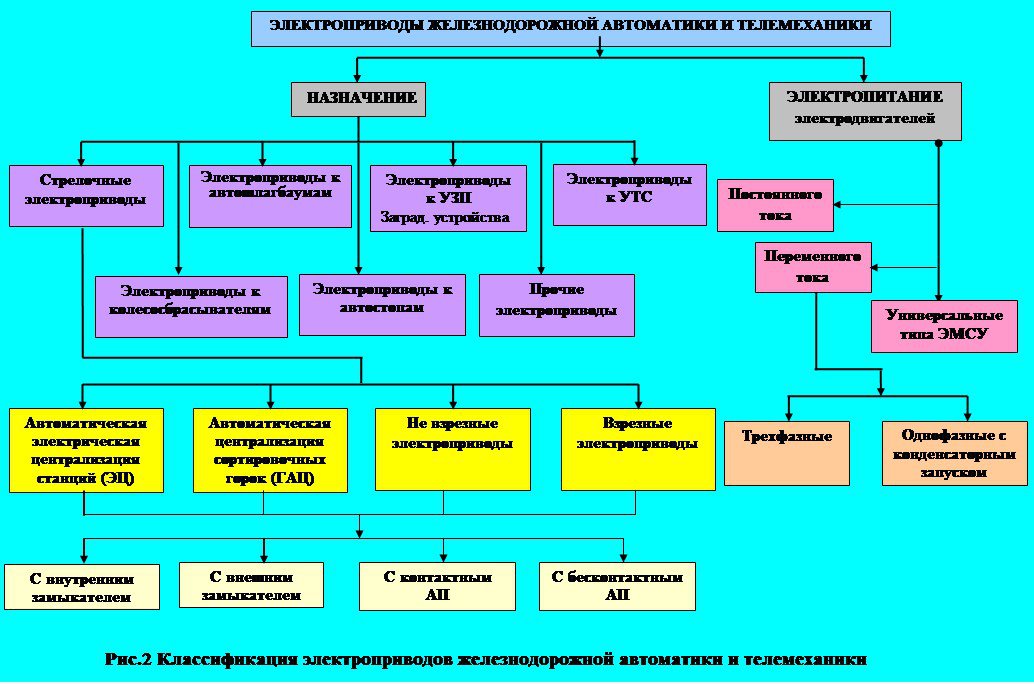
Навигация
1. Режим взреза стрелки.
Такой режим работы характеризуется прохождением подвижного состава в пошерстном направлении по стрелке, не обеспечивающей данный маршрут движения. Взрез стрелки, как правило, является следствием нарушения организации движения поездов и проведения станционной работы.
В стрелочном электроприводе существуют два узла напрямую отвечающие за обеспечение безопасности движения это механизм замыкания шибера и система (механизм) контроля положения стрелки.
Проанализируем самый важный узел стрелочного электропривода – это механизм замыкания шибера.
По виду запирания стрелочных приводов различают СП с внутренним и внешним запиранием. При внутреннем запирании его механизм находится внутри привода, при внешнем – на стрелке.
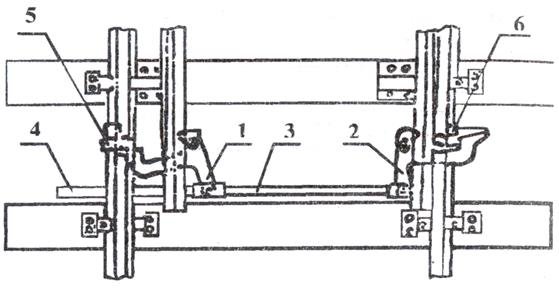
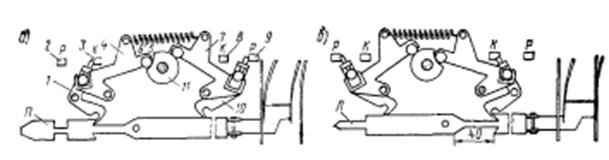
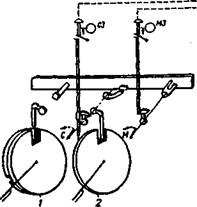
Рис 2б. Стрелочный перевод с крюковым внешним замыкателем.
Конструкция крюкового замыкателя представлена на рис.2б. Снизу на каждом остряке с возможностью поворота смонтированы запорные крюки 1 и 2. Оба крюка соединены тягой 3, которая соединена с рабочей тягой 4. На каждом рамном рельсе закреплена подушка 5 и 6. На рисунке стрелка заперта в крайнем правом положении. Правый запорный крюк охватывает подушку 6, обеспечивая плотное прижатие остряка к рамному рельсу. Никакие вибрации на стрелке не могут нарушить их взаимное расположение. При переводе стрелки запорный крюк движется вместе с соединительной тягой. Отход остряков от рамного рельса в месте цапфы крюка в крайнем положении составляет 165-175 мм.
Поскольку крюки трутся о подушки, центры вращения крюков и центры выпуклых стенок удалены вследствии угона рельсов более чем на 10-20 мм. Раскрытие остряков составляет 170+- 5 мм для защиты крюка от разрушений при взрезе стрелки. Это означает, что данный замыкатель является взрезным, т.е. неправильный перевод стрелки при движении поезда позволяет сохранить замыкатель.
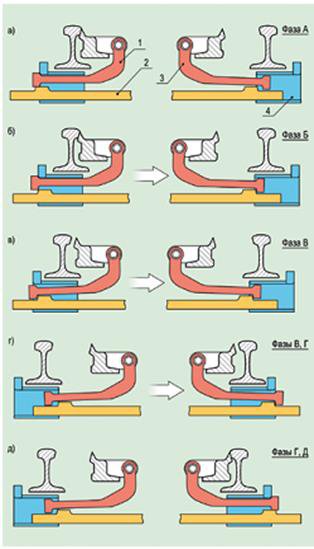
Рис 3. Внешний замыкатель типа ВЗ-7
В отличие от типовых технических решений для скоростных линий со скоростью движения до 200 км/ч проектом ПТКБ ЦП 2726 на остряках и подвижном
сердечнике крестовины (ПСК) стрелочного перевода дополнительно предусматривается установка комплектов внешних замыкателей типов ВЗ-7 и ВЗК-2
соответственно. Работа внешнего замыкателя происходит следу-
ющим образом. В исходном положении (рис. 2, а) левый остряк замкнут левой кляммерой 1, находящейся на выступе фигурной планки 2, скрепленной шарнирно с рабочейтягой. Правый остряк помимо соединительной тяги удерживается еще правой кляммерой 3, которая занимает свободное положение между основанием
4 и фигурной планкой (фаза А). В начале движения шибера (рис. 2, б) выступ
планки у правой кляммеры занимает позицию для перевода (фаза Б). Далее оба остряка размыкаются (рис. 2, в), что соответствует окончанию фазы Б. Ле-вая кляммера перемещается во впадину фигурной планки, которая с помощью заклинивающего выступа начинает вести правую кляммеру. Это положение
соответствует началу фазы В.При подходе правого остряка к рамному рельсу
(рис. 2, г) правая кляммера оказывается на границе замыкания, а левая – в вырезе фигурной планки –окончание фазы В.
По завершению процесса перевода правая кляммера (рис. 2, д) замыкает правый остряк (окон-чание фазы Г). Левый остряк занимает свободное положение между основанием и фигурной планкой и помимо соединительной тяги удерживается в
таком положении еще и левой кляммерой. Далее идет процесс внутреннего замыкания шибераэлектропривода – фаза Д, отключения питания
электродвигателя и получения контроля положения стрелки, что свидетельствует об окончании процесса перевода стрелки.
Стрелочный привод с внутренним замыканием показан на рис 3.
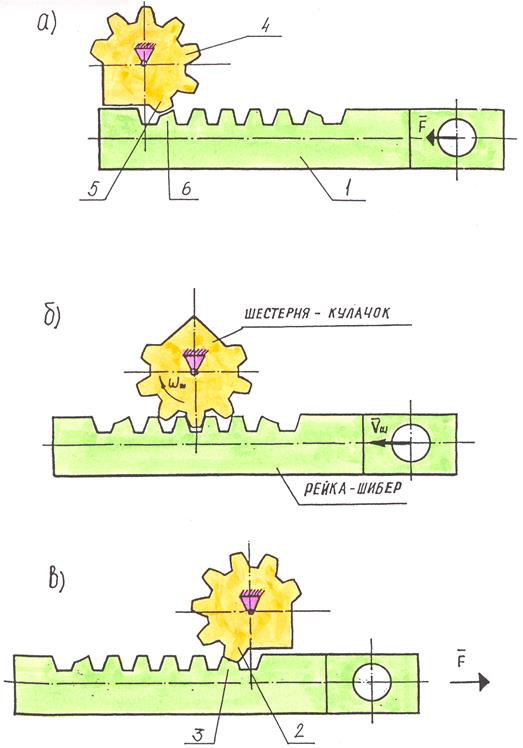
Рис. 3 Внутренний запирающий механизм электропривода серии СП
На рис. 3 показан запирающий механизм электроприводов серии СП, процесс работы его в конце перевода стрелки. Поступательное движение шибера 1 осуществляется путем реечной передачи от шестерни главного вала 4 на рейку, которая выполнена заодно с шибером (рис. 3, 2б). Крайние зубья шестерни 2 и 5 и рейки 3 и 6 имеют специальную форму и являются запирающими зубьями в крайних положениях шибера (рис. 3)
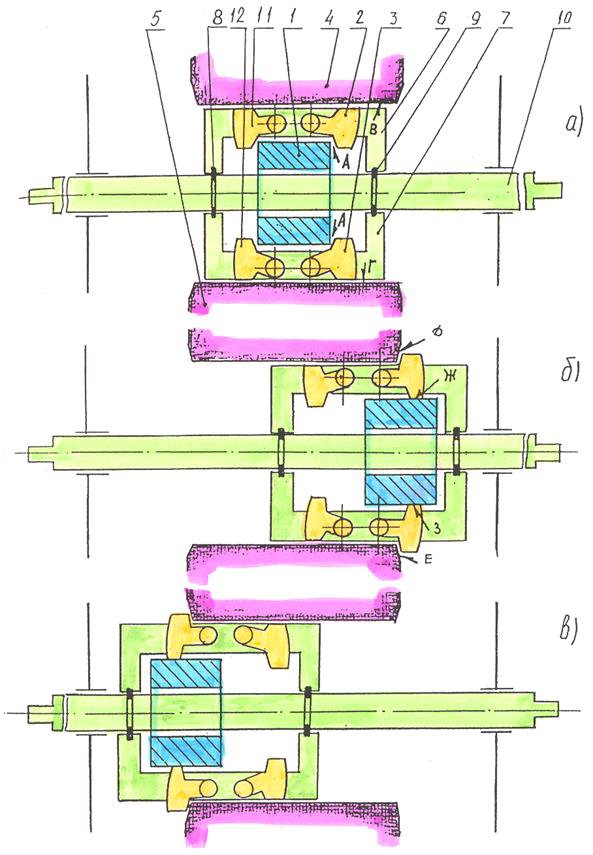
Рис. 4. Принцип работы механизма запирания шибера электропривода
ВСП-150
Режим перевода стрелки (рабочий режим)
Рассмотрим в качестве примера работу механизма запирания шибepa электроприводов серии СП.
На рис. 3 показан запирающий механизм электроприводов серии СП, процесс работы его в конце перевода стрелки. Поступательное движение шибера 1 осуществляется путем реечной передачи от шестерни главного вала 4 на рейку, которая выполнена заодно с шибером (рис. 3, 2б). Крайние зубья шестерни 2 и 5 и рейки 3 и 6 имеют специальную форму и являются запирающими зубьями в крайних положениях шибера (рис. 3)
На рисунке 4 показан запирающий механизм винтового стрелочного электропривода ВСП-150, кинематический процесс работы сводится к следующему. Толкатель 1 (рис. 4а), движущийся поступательно слева направо упирается в кулачки 2 и 3 в точке "А", пытаясь повернуть их на своей оси. Однако этому препятствуют упоры 4 и 5, в поверхность "В" и "Г" которых упираются кулачки. Поступательное движении толкателя 1 приводит к поступательному движению кулачков 2 и 3, закрепленных в корпусе 6 и 7 механизма запирания шибера 10. В конце перевода кулачки выходят за пределы поверхности "В" и "Г" упоров 5 и 6, поворачиваются на своей оси под действием толкателя 1 и входят в контакт с упорами 5 и 6 поверхностями "Д" и "Е" (рис. 4б), а толкатель занимает место, контактируя с поверхностью кулачков "Ж" и "З", и тем самым запирает их. Шибер заперт в крайнем правом положении.
Для того чтобы осуществлялся перевод шибера в другое крайнее положение (рис. 4в), необходимо толкателю 1 двигаться справа на лево до упора о кулачки 11 и 12, освободив кулачки 2 и 3 для поворота и, тем самым, разомкнув шибер.
Дальнейший процесс перевода и запирания шибера идет аналогично предшествующему. поступательному движению кулачков 2 и 3, закрепленных в корпусе 6 и 7 механизма запирания шибера 10. В конце перевода кулачки выходят за пределы поверхности "В" и "Г" упоров 5 и 6, поворачиваются на своей оси под действием толкателя 1 и входят в контакт с упорами 5 и 6 поверхностями "Д" и "Е" (рис. 3б), а толкатель занимает место, контактируя с поверхностью кулачков "Ж" и "З", и тем самым запирает их. Шибер заперт в крайнем правом положении.
Для того чтобы осуществлялся перевод шибера в другое крайнее положение (рис. 3в), необходимо толкателю 1 двигаться справа на лево до упора о кулачки 11 и 12, освободив кулачки 2 и 3 для поворота и, тем самым, разомкнув шибер.
Дальнейший процесс перевода и запирания шибера идет аналогично предшествующему.
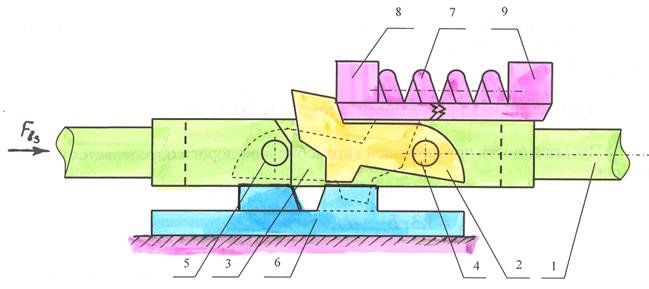
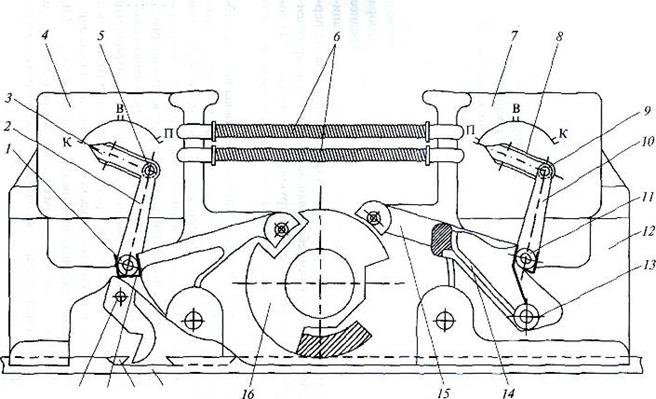
Рис.5 Кинематическая схема механизма замыкания и взреза стрелочного
электропривода ВСП-220
Механизма замыкания и взреза стрелочного электропривода ВСП-220 представляет собой конструкцию (см.рис.5) из шибера 1, состоящего из двух выходных концов круглого сечения диаметром 45 мм и средней части прямоугольного сечения с проточками, где устанавливаются шарнирно на осях 4,5 кулачки 2,3. Механизм фиксации и взреза состоит из шиберной части 1,2,3,4,5, толкателя 6 и упругого упора, который представляет собой три элемента: упор левый 8, упор правый 9, разведенные пружиной 7.
При взрезе стрелки усилие на шибере превосходит величину усилия удержания - усилия фиксации шибера. Упор 8 под действием этой силы, действующей через кулачок 2, преодолевая усилие пружины 7, сжимает ее и, при неподвижном положении толкателя 6, шибер осуществляет движение в направлении действия силы взреза (слева направо). При этом кулачок 2 выходит из контакта с выступом толкателя 6 о поверхность, проворачивается на своей оси 4 и дальнейшее движение шибера происходит беспрепятственно. Электропривод взрезан.
Для того чтобы восстановить работоспособность привода, необходимо:
· При помощи специальной гайки-винта сжать упор (примерно на 15 мм).
· Вручную, при помощи курбеля, перевести гайку ШВП в крайнее до взреза положение.
· При помощи рычага, (в качестве рычага можно использовать лом) перевести остряки в первоначальное положение.
· Распустить сжатый упор, открутив гайку-винт.
· Вручную, или при помощи курбельной рукоятки, произвести перевод электропривода, убедившись в его работоспособности.
Основные характеристики стрелочных переводов
|
№ |
Обозначение |
Применения СП и их характеристика |
|
1 |
СП-12У |
До скоростей 200 км/час.,для ЭЦ и ДЦ с внутренним запиранием, невзрезные, с электродвигателем постоянного МСП-0,25 и МСП-0,15 и переменного тока типа МСТ-0,25. |
|
2 |
ПАШ-1 |
Автошлагбаум с червячным редуктором |
|
3 |
ША |
Автошлагбаум с волновым редуктором |
|
4 |
СПМ |
До скоростей 200 км/час.,для ЭЦ и ДЦ с внутренним запиранием с шаговым винтовым редуктором, с межостряковой соединительной тягой |
|
5 |
СП-6К |
До скоростей 200 км/час., для рельсов тяжелого типа Р65 и Р75 с крестовинами, имеющими подвижный сердечник, невзрезной с внутренним запиранием, с электродвигателем постоянного МСП-0,25 и МСП-0,15 и переменного тока типа МСТ-0,25. |
|
6 |
ВСП-150 |
До скоростей 200 км/час., для ЭЦ и ДЦ с внутренним запиранием с шаговым винтовым редуктором с двумя контрольными линейками |
|
7 |
ВСПГ-1 |
Для ГЦ с внутренним запиранием с шарико-винтовой парой привода остряка |
|
8 |
ВСП-220 |
До скоростей 200 км/час., для ЭЦ и ДЦ с внутренним запиранием, с шарико-винтовой парой привода остряка, ход шибера 220 мм., с устройством контроля вреза |
|
9 |
ВСП-2х150Д |
До скоростей 200 км/час., для ЭЦ и ДЦ с внутренним запиранием, с шарико-винтовой парой привода остряка, ход шибера 220 мм.,с 2-мя шиберами |
|
10 |
СПГБ-4Б |
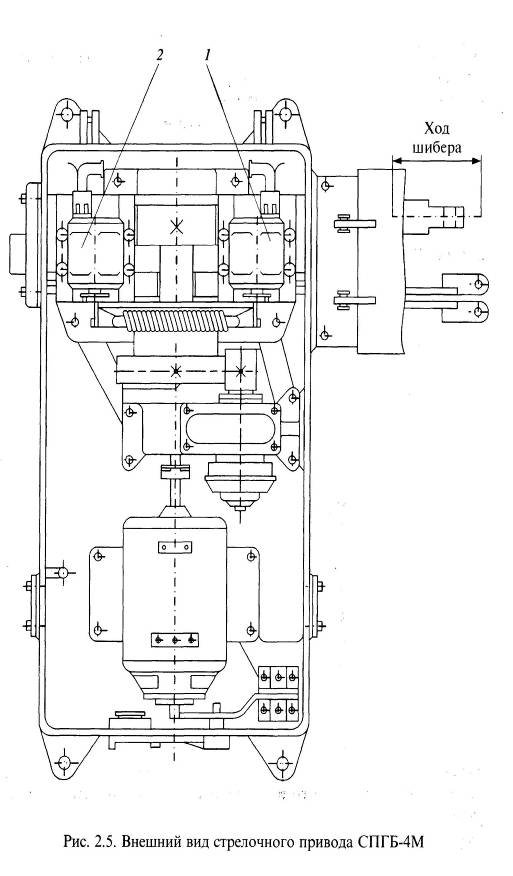
Для ГЦ с внутренним запиранием, невзрезной, бесконтактный |
Двухконтурное замыкание и удержание остряков.
На рисунке 9 приведена кинематическая схема двухконтурного замыкания и удержания остряков стрелочного перевода стрелочным электроприводом
ВСП-2х150Д, где первый контур состоит из: шибера - рабочей тяги прижатого остряка (в данном случае к ближнему остряку) - внутреннего замыкателя электропривода, второй контур: другой шибер - вторая рабочая тяга - отведенный остряк – межостряковая соединительная тяга – прижатый остряк. При повреждении одного из каналов удержание прижатого остряка в замкнутом положении будет обеспечено.
Работа механизма замыкания стрелочного электропривода ВСП-2х150Д сводится к следующему: Толкатель 1 (рис.10а), движущийся поступательно слева направо упирается в кулачки 2 и 3 в точке "А", пытаясь повернуть их на своей оси. Однако, этому препятствуют упоры 4 и 5, в поверхность "В" и "Г" которые упираются в кулачки. Поступательное движении толкателя 1 приводит к поступательному движению кулачков 2 и 3, закрепленных в корпусе 6 и 7 механизма запирания шиберов 10, 11 (12, 13).
Рис.9 Кинематическая схема двухконтурного замыкания остряков стрелочного перевода с электроприводом ВСП-2х150Д
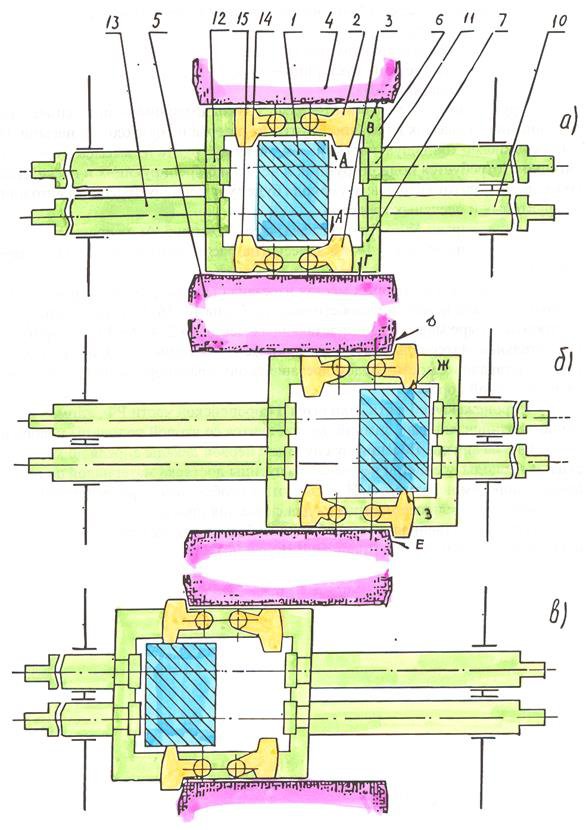
Рис. 10 Кинематическая схема механизма замыкания стрелочного
электропривода ВСП-2х150Д
В конце перевода кулачки выходят за пределы поверхности "В" и "Г" упоров 5 и 6, поворачиваются на своей оси под действием толкателя 1 и входят в контакт с упорами 4 и 5 поверхностями "Д" и "Е" (рис.10б), а толкатель занимает место, контактируя с поверхностью кулачков "Ж" и "З", и тем самым запирает их. Шиберы заперты в крайнем правом положении.
Для того чтобы осуществлялся перевод шиберов в другое крайнее положение (рис.10в) необходимо толкателю 1 двигаться справа налево до контакта с кулачками 14 и 15, освободив кулачки 2 и 3 для поворота и, тем самым, разомкнув шиберы.
Дальнейший процесс перевода и запирания шиберов идет аналогично предшествующему.
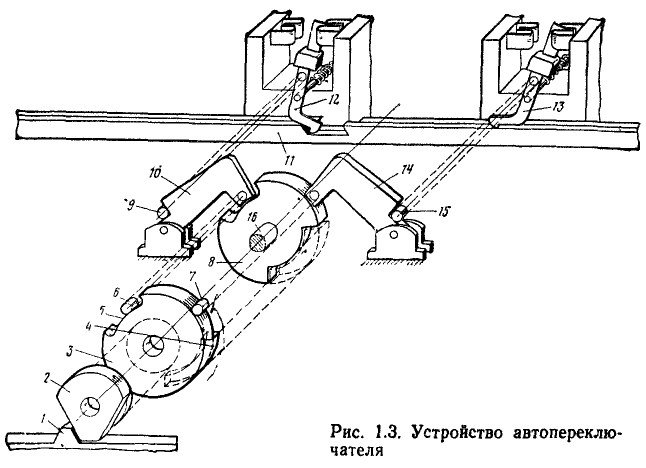
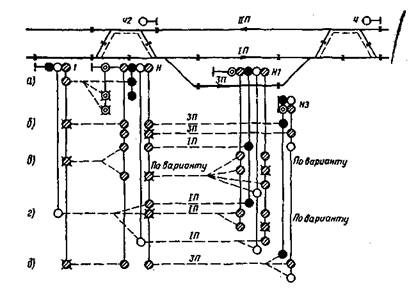
По виду автопереключателей они делятся на контактные и бесконтактные.
Блок автопереключателя предназначен для автоматического переключения обмоток электродвигателя, его выключения в конце каждого полного перевода стрелки и замыкания контрольных цепей положения стрелки.
Основными частями автопереключателя являются два комплекта шестипарных контактов врубающего типа, кулачки 12 и 13, которые приводятся в движение кулачками 10 и 14 и связанные с контрольными линейками 11.
При переводе стрелки автопереключатель работает так. Через механическую передачу приводится во вращение зубчатое колесо 3, свободно насаженное на вал 16. На ступице этого колеса имеется выступающая часть 3 с вырезом 5 и уступом 4. Этот уступ входит в вырез диска 8, жестко закрепленном на главном валу. Между гранями выреза и уступа 4 имеется зазор, вследствии чего вращение от зубчатого колеса на главный вал передается не сразу, а только при повороте колеса на 460 . После этого уступ 4 начинает толкать диск 8 и вместе с ним вращать главный вал.
Угол 460 определяет холостой ход привода, необходимый для разгона
электродвигателя и переключения контактов автопереключателя в начале перевода стрелки. При вращении выступа 3 и его выреза 5 выталкивается ролик 6 упорного рычажка 9. Этот рачажок поднимаясь, снимает замыкание с диска 8 и одновременно через ролик 9 поворачивает кулачок 12 автопереключателя; в то же время через ролик 15 кулачок 13 не поварачивается. Происходит переключение контактов: размыкаются внутренние контакты, через которые проходят контрольные цепи положения стрелки, и замыкаются наружные, через которые замыкаются рабочие цепи перевода стрелки. Нижний крючкообразный конец кулачка 12 выходит из выреза контрольных линеек 11, освобождая их от свободного движения вместе с остряками стрелки. Выталкивание ролика 6 из радиального выреза и поднятие упорного рачажка происходят раньше, чем выступ 4 начнет толкать диск 8 и вращать главный вал. На все время перевода стрелки ролики 6 и 7 рычажков 10 и 14 катятся по поверхности
диска 8, а оба кулачка автопереключателя замыкают наружные (рабочие) контакты.
В конце полного перевода стрелки вырез диска 8 подходит к ролику 7 рычажка 14, который под действием пружины, надетой на ось вращения кулачка 13, западает в этот вырез. Вместе с рычажком переключается влево кулачок 13 автопереключателя с рабочих контактов на контрольные. Нижний конец кулачка западает в совмещенные вырезы контрольных линеек, чем контролируется правильность перевода обеих остряков стрелки. Если один из остряков стрелки не переводится, то вырезы на контрольных линейках не совмещаются. Кулачек автопереключателя, упираясь в целую часть линейки, занимает среднее положение, отчего размыкаются рабочие и не замыкаются контрольные контакты и контроль положения стрелки не появляются.
В случае взреза стрелки перемещаются контрольные линейки и скошенной гранью линейки отжатого остряка клювообразный конец кулачка 12 выталкивается на поверхность линейки. Кулачок занимает среднее положение, отчего размыкаются контрольные контакты и стрелка теряет контроль. В случае обрыва рабочей тяги стрелка не переводится и контрольные линейки не передвигаются.
Для ограничения поворота главного вала и фиксации положения запирания привода служит ограничивающее устройство, состоящее из выступов 1 и 2.
Стрелочный электропривод с бесконтактным автопереключателем СПГБ-4.
![]()
![]()
![]()
![]() 20 19 18 17
20 19 18 17
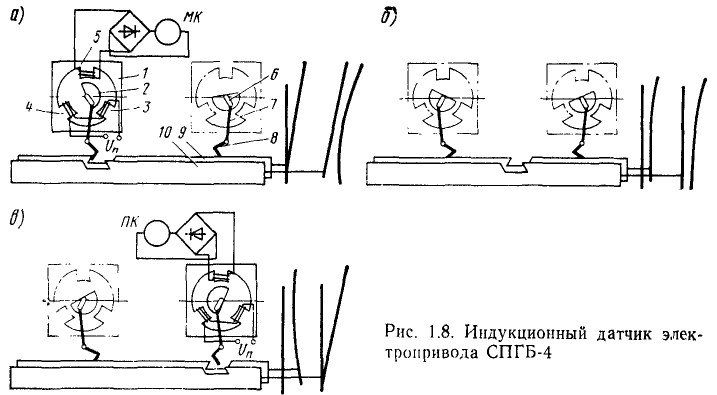
Рис. 11 Электропривод горочный с бесконтактным автопереключателем СПГБ-4.
Стрелочный электропривод СПГБ-4 является невзрезным, с внутренним замыканием, быстродействующим с временем перевода стрелки 0,5-0,6 сек. Быстродействие при переводе стрелки достигается применением
Двигателя постоянного тока МСП-0,25 на рабочее напряжение 110 В и повышением напряжения питания двигателя до 220-240 В.
Электропривод СПГБ-4 конструктивно не отличается от электропривода СП-3. Отличие состоит в применении бесконтактного автопереключателя, значительно увеличившем надежность работы автопереключателя, поскольку исключается механический износ контактных пружин, обгорание контактов, не требуется обогревателей контактов.
В блоке автопереключателя вместо контактных групп устанавливают два индукционных датчика, каждый из которых фиксирует только одно переведенное плюсовое или минусовое положение стрелки. Управление работой датчиков производят, как и в приводах СП-3, СП-6, переключательные рычажки, положение которых зависят от положения стрелки и местоположения совмещенных вырезов контрольных линеек.
Каждый индукционный датчик (рис. 1.8а) расположен в корпусе 1 и представляет собой статор с тремя индукционными катушками. На нижние питающие катушки 3 и 4 подается напряжение питания 24 В переменного тока частотой 50 Гц. Напряжение выхода снимается с верхней обмотки 5. На главном валу датчика закреплен поворачивающийся сектор 2 направление и угол поворота которого зависит от направления перевода стрелки. Ротор датчика поворачивается с помощью поводка 6, который связан с переключательным рычагом 7. Как и в приводе СП-3, зуб 8 нижней части рычага после перевода стрелки западает в совмещенные вырезы конторольных линеек 9 и 10, поводок перемещается в положение контроля поварачивая вал-ротор датчика. Сектор 2, поварачиваясь вместе с валом датчика, также занимает положение контроля, при котором вся поверхность сектора будет находится в непосредственной близости от катушек 3 и 5. Магнитный поток, создаваемый питающей катушкой 3, замыкается через сектор 2 и наводит в выходной катушке 5 значительную э.д.с., значение которой соответствует переведенному положению стрелки.
К выходам катушки 5 подключен выпрямительный мостик, через который выпрямленный ток поступает в обмотку реле МК. Реле срабатывает, фиксируя минусовое положение стрелки. При переводе стрелки в плюсовое положение зубья переключательных рычажков оказываются на поверхности контрольных линеек (рис. 1.8 б). Поводки обоих датчиков поворачивают свои вал-роторы в среднее положение, при котором вся поверхность сектора находится в непосредственной близости от питающих катушек 3 и 4 (рис. 1.8 а). При таком положении сектора сопротивление магнитному потоку будет максимальным и э.д.с. на выводах катушки 5 станет равной нулю. Контрольные реле МК и ПК обесточиваются.
После окончания перевода стрелки в плюсовое положение в совмещенные вырезы конторольных линеек западает зуб переключательного рычажка правого датчика (рис. 1.8 в). Вслед за рычажком поворачивается вал ротор, а сним и сектор в положение контроля. На выводах обмотки 5 (рис. 1.8 а) правого датчика наводится максимальная э.д.с., и в результате выпрямления переменного тока диодным мостиком срабатывает реле ПК.
Положение переключательного рычажка 7 и сектора 2 левого датчика приводит к снижению наводимой э.д.с. в катушке 5 до нуля. Реле МК обесточивается.
Бесконтактный переключатель контролирует взрез стрелки, обрывы рабочей и контрольной тяг. В этих ситуациях переключательные рычажки будут находится на поверхности контрольных линеек, секторы повернуты в положение, показанное на рис. 1.8 б, контрольные реле МК и ПК обесточены.
Коммутация рабочих и контрольных цепей электроприводов
Вид коммутаций рабочих и контрольных цепей, выполняемых непосредственно в приводе, существенно влияет на показатели.
Слабым звеном в контактных проводах, в особенности быстродействующих, является автопереключатель. В практике эксплуатации сортировочных горок и маневровых районов известны случаи, когда отказы автопереключателя делали невозможным перевод стрелок и даже приводили к авариям. Наиболее характерными причинами отказов являются подгорание, механический износ или излом контактов, их облединение, поломка контактных колодок или пружин кручения автопереключателя. Уход за автопереключателем сложен, так как необходимо поддержания заданного контактного нажатия, устранение частых разрегулировок, удаление металлической пыли.
Некоторые из перечисленных причин отказов трудно устранимы, так как свойственны любым контактным системам автопереключателей, например, значительный износ из-за большого среднесуточного числа переводов стрелок, обледенение ввиду напольных условий работы электроприводов и т. д. Наметившаяся
в связи с этим за рубежом тенденция к уменьшению числа контактов автопереключателя до минимума и передача их функций реле схемы управления стрелкой приводит к увеличению числа проводов между постом централизации
и стрелочным электроприводом и в целом не повышает надежности устройств.
Повышение надежности работы контактов автопереключателя горочного электропривода магнитным дугогашением, герметизацией, обогревом и тщательным уходом уже не дает желаемого результата из-за значительного роста коммутируемых мощностей, увеличения числа срабатывания и необходимости повышения быстродействия.
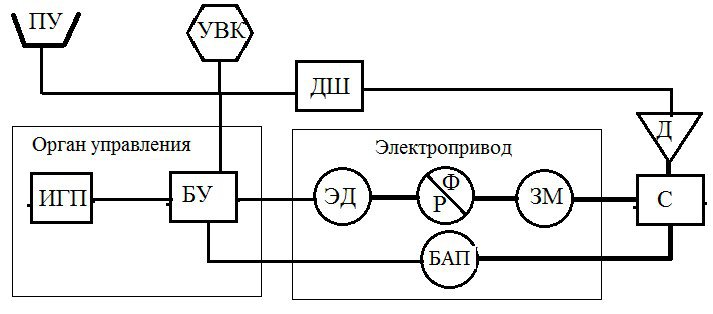
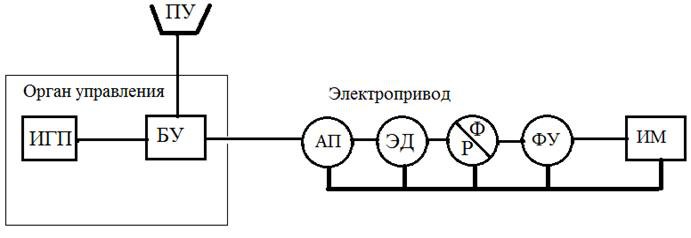
Рис. 11. Структурная схема электропривода
а) бесконтактный электропривод, б) обобщенная схема электропривода
Бесконтактный привод не имеет недостатков, свойственных контактному приводу, но его применение связано с выключением рабочей цепи на посту централизации, а не в приводе. Использование для этой цели пускового реле означало бы простой перенос контактного коммутатора со стрелки на пост и не повышало бы общей надежности аппаратуры.
Таким образом целесообразно выполнить СПГБ (быстродействующего горочного стрелочного привода) бесконтактным, а блок управления электроприводом – с бездуговой коммутацией.
В соответствии с изложенным построена структурная схема горочного электропривода рис. 11а, содержащая источник гарантированного электропитания ИГП; блок управления электроприводом БУ; электродвигатель ЭД- источник механической энергии; редуктор Р – усилитель вращающего момента электродвигателя; фрикцион – тормоз Ф, обеспечивающий защиту электродвигателя от перегрузок; запирающий механизм ЗМ, исключающий отход прижатого остряка при движении вагонов по стрелке; бесконтактный автопереключатель БАП, сигнализирующий о положении стрелки С; датчик пошерстного следования подвижных единиц Д; дешифратор сигналов датчика о врезе стрелки ДШ; пульт управления ПУ, управляющий (вычислительный) комплекс УВК. Тонкими линиями обозначены электрические связи, жирными – механические.
Структурный анализ электроприводов автошлагбаума и автостопа метро проводится аналогично. На обобщенной структурной схеме рис 11б обозначены: АП – контактный автопереключатель; ФУ - устройство, фиксирующее исполнительный механизм в крайнем положении; ИМ- исполнительный механизм (брус шлагбаума, ударный рычаг или скоба автостопа). Контактный автопереключатель применяют для удешевления электропривода при небольшом среднесуточном числе срабатываний и сравнительно невысокой коммутируемой мощности. Электропривод электрической централизации имеет такую же структурную схему, только вместо звеньев ФУ и ИМ имеются звенья ЗМ и С.
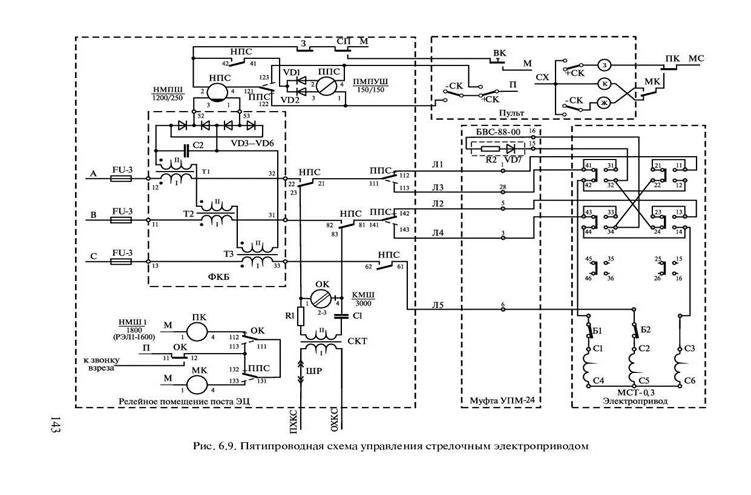
Принципы построения схем управления стрелочными переводами
Схемы управления стрелочными электроприводами являются наиболее ответственными узлами релейной централизации. Применяют три разновидности таких схем: четырехпроводную (при местной системе питания) и двухпроводную- при электродвигателях постоянного тока; пятипроводную – при электродвигателях постоянного тока. Эти схемы должны: обеспечивать перевод и контроль положения стрелки; исключать перевод стрелки под движущимся составом в случае поступления в электродвигатель тока другого источника; обеспечивать полный перевод стрелки если при ее переводе на стрелочную секцию вступает подвижная единица; обеспечивать реверсивность управления стрелкой с возможностью возврата стрелки из любого промежуточного положения в исходное; обеспечивать контроль положения стрелки после полного ее перевода; контролировать взрез стрелки и сообщение проводов.
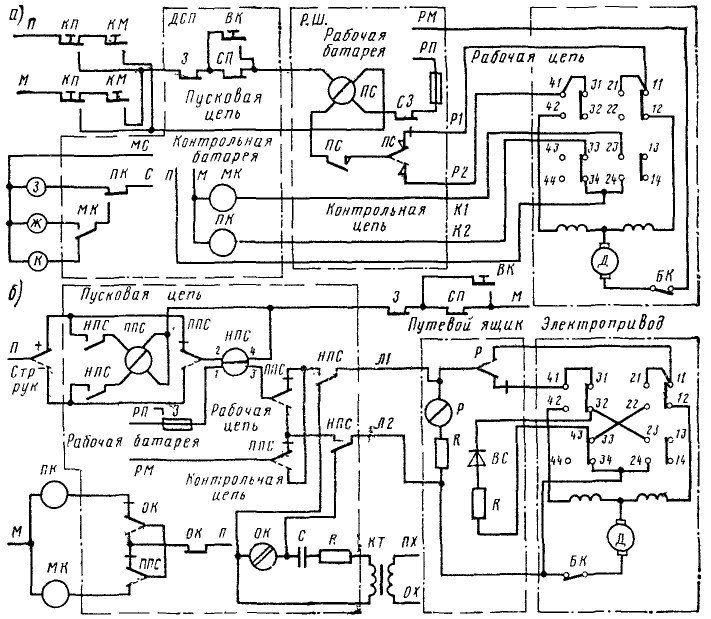
Рис. 12. Схема четырех – и двухпроводной схем управления стрелочным электроприводом
В двухпроводной схеме управления стрелочным электроприводом (рис 12) на посту ЭЦ установлены: нейтральное НПС, поляризованное ППС пусковые стрелочные реле, общее контрольное реле ОК, плюсовое ПК и МК контрольные реле. Пост ЭЦ соединен двумя проводами Л1 и Л2 (линейными) с реверсирующим реле Р и электроприводом. По этим проводам образуется рабочая цепь для перевода стрелки и контрольная переменного тока для контроля положения стрелки.
В соответствии с рис. 12 стрелка находится в плюсовом положении. Контрольная цепь, подключенная через трансформатор КТ к источнику переменного тока фиксирует плюсовое положение стрелки так. Реле ОК зашунтировано выпрямительным столбиком ВС так, что через ВС и контакты 33-34, 31-32 автопереключателя замыкаются отрицательные полуволны переменного тока от полюсов ОХ и ПХ. Через обмотку реле ОК протекает ток, постоянная составляющая которого имеет положительную полярность. Цепочка К – С повышает постоянную составляющую тока, протекающего через реле, и исключает протекание постоянной составляющей через трансформатор.
От постоянной составляющей положительной полярности реле ОК притягивает нейтральный якорь, поляризованный якорь переключается в нормальное положение, и создается цепь включения реле ПК. Через замкнутый контакт реле ПК, включается зеленая лампочка, контролирующая плюсовое положение стрелки (рис. 12 а).
Для перевода в минусовое положение ДСП переключает стрелочный коммутатор в положение ( - ). Образуется цепь включения реле НПС по верхней обмотке через поляризованный контакт теле ППС в нормальном положении с проверкой условий свободности стрелочной изолированной секции (СП) и отсутствия замыкания стрелки в ранее установленном маршруте (3). Сработав, реле НПС замкнувшими фронтовыми контактами подготавливает цепь включения реле ППС, а также рабочую цепь питания двигателя Д. Разомкнувшимися тыловыми контактами реле НПС от линейных проводов Л1 и Л2 отключается реле ОК, чем прекращается контроль плюсового положения стрелки. Реле ПК выключается, лампа З гаснет, загорается лампа К.
Реле ППС, сработав по цепи питания нижней обмотки, переключает поляризованный якорь. От полюса рабочей батареи РП к РМ пройдет ток через фронтовые контакты реле НПС, переведенные контакты реле ППС, линейные провода Л2, Л1, обмотку реле Р и нижнюю обмотку реле НПС. Поляризованное реле Р переключит поляризованный якорь и замкнет рабочую цепь питания двигателя через контакты 11-12 автопереключателя. Стрелка переведется в минусовое положение. На все время перевода реле НПС остается включенным за счет рабочего тока, протекающего по нижней токовой обмотке.
По окончании перевода стрелки рабочая цепь размыкается контактами 11-12 автопереключателя. Реле НПС выключается, его контакты размыкают рабочую цепь и включают контрольную. Через замкнутые контакты 24-23 и 21-22 автопереключателя выпрямительный столбик ВС подключается параллельно обмотке реле ОК обратной полярностью так, что положительные полуволны переменного тока замыкаются через ВС, а отрицательные – через реле ОК. Реле ОК сработав, переключает поляризованный якорь в переведенное положение, притягивает нейтральный якорь и образуется цепь включения реле МК. Загорается желтая лампа контроля минусового положения, красная гаснет.
Технические требования, предъявляемые к электродвигателям
Работу электроприводов железнодорожной автоматики и телемеханики характеризуют ряд особенностей: повторно-кратковременный режим работы, реверсивный характер нагрузки, дистанционное управление приводом. При этом нагрузка у электроприводов изменяется в широких пределах.
Для обеспечения перевода стрелки с учетом инерции ее масс и привода в любых атмосферных условиях электродвигатель должен обладать большим пусковым моментом. Знакопеременный характер работы привода требует от двигателя реверсивности и быть рассчитан для работы в повторно-кратковременном режиме с перегрузками. Дистанционное управление стрелочным приводом- прямое или кодовое при местном, центральном или магистральном питании – делает предпочтительным двигатель, который не требует пусковых реостатов или других специальных приборов. Исходя из необходимости обеспечения бесперебойной работы централизованных стрелок и экономичности схем кправления применяют электродвигатели постоянного тока. Непрерывность питания в этом случае легко обеспечить от аккумуляторных и конденсаторных батарей.
Из электродвигателей постоянного тока наилучшим образом отвечает требованиям электродвигатель с последовательным возбуждением, обладающий большим пусковым моментом и большой перегрузочной способностью. При малых моментах на валу благодаря «мягкой» характеристике он развивает высокую скорость, а при больших – автоматически снижает ее. Это позволяет применяя один и тот же двигатель, обеспечивать ускоренный перевод легких стрелок в маневровых районах и более медленный перевод тяжелых стрелок на главных путях станции.
Из электродвигателей переменного тока характеристики близкие к требуемым, имеет трехфазный асинхронный двигатель с короткозамкнутым ротором. Большим преимуществом асинхронного двигателя являюся отсутствие коллектора и простота обслуживания. К недостаткам асинхронного двигателя относится квадратичная зависимость момента на валу от напряжения, в следствии чего при снижении напряжения значительно уменьшается пусковой момент и перегрузочная способность.
Однофазный коллекторный электродвигатель отличается от электродвигателя постоянного тока более тяжелыми условиями коммутации, что приводит к быстрому износу и порче коллектора и щеток. Преимуществом однофазного коллекторного двигателя по сравнению с двухфазным является меньший потребляемый ток, но развивает недостаточный пусковой момент, что приводит к усложнению механической связи с приводом.
Номинальные параметры двигателей постоянного тока
|
Характеристика |
Тип двигателя |
Значение характеристик |
||
|
Напряжение |
МСП-0,15 МСП-0,25 |
30 30 |
110 110/120 |
160 160 |
|
Мощность, Вт |
МСП-0,15 МСП-0,25 |
150 250 |
150 250/550 |
150 250 |
|
Потребляемый ток, А |
МСП-0,15 МСП-0,25 |
7,7 12,5 |
2,2 3,3/3,6 |
1,5 2,5 |
|
Частота вращения об/мин |
МСП-0,15 МСП-0,25 |
850 1460 |
850 1700/3600 |
850 1700 |
|
Момент, Н.м. |
МСП-0,15 МСП-0,25 |
1,67 1,47 |
1,67 1,47/1,47 |
1,67 1,47 |
|
К.П.Д |
МСП-0,15 МСП-0,25 |
0,58 0,6 |
0,55 0,7/0,8 |
0,56 0,7 |
Номинальные параметры стрелочных двигателей переменного тока
|
Характеристика |
Значение характеристик |
||
|
МСТ-0,3 |
МСТ-0,25 |
МСТ-0,6 |
|
|
Напряжение питания, В |
(220/127) |
(190/110) |
(190/110) |
|
Потребляемый ток, А |
1,4/2,4 |
2,1/3,6 |
2,8/4,85 |
|
Мощность, Вт |
200 |
300 |
600 |
|
Вращающий момент, Н.м |
1,57 |
3,43 |
2,37 |
|
Частота вращения, об/мин |
1250 |
850 |
2850 |
|
К.П.Д, % |
59 |
66 |
69 |
|
Cos |
0?78 |
0,72 |
0,84 |
|
Частота, Гц |
50 |
50 |
50 |
Похожие работы

... наружными полиэтиленовыми оболочками или покровами по условиям пожарной безопасности запрещается. Прокладка кабеля должна соответствовать требованиям, изложенным в Правилах производства работ по устройству автоматики и телемеханики на железнодорожном транспорте, ВСН 129/1 – 80. О результатах осмотра трассы подземных кабелей и кабельных желобов электромеханик записывает в Журнал формы ШУ – 2. ...


... -контрольные устройства и устройства электроключевых зависимостей отличаются простотой и невысокой стоимостью, они сыграли большую роль в обеспечении безопасности движения на станциях и в дальнейшем развитии технических средств СЦБ. 2. Механическая и электрическая централизация При механической централизации перевод стрелок и открытие семафоров (светофоров) осуществляется непосредственно с ...
... АЛС числового хода в диапазоне со средней частотой 75 Гц и частотной системы локомотивной сигнализации в диапазоне 100 – 400 Гц и может применяться на участках железных дорог с любыми видами тяги. Для работы рельсовых цепей автоблокировки используются частоты диапазона 50 – 100 Гц. Максимальная длина рельсовой цепи составляет 2000 м. При этом шунтовой и контрольный режимы обеспечиваются при ...
... которые в соответствии с законодательством Российской Федерации подлежат лицензированию, осуществляются обществом при наличии соответствующей лицензии. Основными задачами Биробиджанской дистанции сигнализации, централизации и блокировки являются: 1) содержание в технически исправном состоянии средств железнодорожной автоматики и телемеханики в установленных границах дистанции, предупреждение и ...
0 комментариев