Основные требования к конструкции индикаторов и регуляторов
Оценка результатов принятого художественно– конструкторского решения
Рассмотрев суть метода “проб и ошибок” , можно сказать , что творческий процесс носит неупорядоченный – “бестолковый” , характер
Метод морфологического анализа (Ф.Ц. Викки 1944 г.) – относится к табличным или матричным способам представления информации
Навигация
Основные требования к конструкции индикаторов и регуляторов
Основы конструирования
170408
знаков
6
таблиц
43
изображения
4.2. Основные требования к конструкции индикаторов и регуляторов.
Визуальные, акустические и тактильные индикаторы.
Нажимные, движковые (ригельные), рычажные, вращательные регуляторы.
Принципы группирования индикаторов и регуляторов на панелях управления.
Общие требования к органам управления и индикации.
4.3. Эргономическая отработка конструкций.
Эргономические показатели (ГОСТ 16456–70): Гигиенические. Антропометрические. Физиологические и психофизические. Психологические.
Эргономический анализ и отработка конструкций: Методы исследований. Виды исследований. Основные этапы эргономической отработки. Факторы эргономического анализа. Оценка результатов принятого художественно–конструкторского решения. Эстетический анализ. Эстетические показатели (информационная выразительность; целостность композиции; совершенство производственного исполнения и стабильность товарного вида).
Основные требования к форме, отделке и окраски внешних поверхностей объекта. Влияния освещения на восприятие формы и цвета. Требования к освещению.
4.4. Основы композиции.
Задача эстетического анализа. Композиция: Общие категории (Тектоника. Объемно–пространственная структура). Свойства и качества (Целостность формы. Соподчиненность. Равновесие. Симметрия и асимметрия. Динамичность и статичность формы. Единство характера формы). Средства (определяющий композиционный прием. Пропорции и масштаб. Контраст и нюанс. Метр и ритм. Темп и пластика).
Некоторые особенности восприятия формы. Оптические иллюзии. Психологические факторы восприятия.
4.5. Элементы цветоведения.
Физические и психологические характеристики цвета: Яркость, цветовой тон, чистота; Светлота, насыщенность.
Влияние видов отражения.
Цветовые модели: Линейная. Трехмерная модель Мессела. Цветовой график.
Особенности психологического восприятия цвета. Цветовой круг. Выбор цветовых сочетаний: Контрастная и нюансная гармония.
Цветовые иллюзии.
Основные рекомендации по выбору цветовых решений (Рабочее место. Рабочая зона. Помещение (интерьер) в целом).
Сигнальные значения цвета.
5. Основы патентоведения.
Изобретательство – важный фактор технического прогресса. Изобретательское право. Объекты и субъекты изобретательского права. Защита объектов изобретательского права (Патент; АС; Диплом).
Открытие. Изобретение. Промышленный образец. Рационализаторское предложение.
Изобретательская деятельность: Выявление изобретений (Главные критерии изобретения. Патентоспособность). Прототип. Аналоги. Существенные признаки (Структуры. Вида. Отношения). Существенные отличия. Положительный эффект. (ГОСТ 15.011–82).
Патентный поиск. Источники порочащие, не порочащие новизну изобретения.
Патентная информация (Документация). Справочно–поисковый аппарат. Система МКИ. Справочно–информационные фонды патентных служб.
Составление и оформление заявки на изобретение. Описание изобретения. Формула изобретения.
6. Активизация инженерного творчества.
Разрешение технических противоречий (Внешние. Внутриобъектные). Процесс поиска новых идей – процесс выявления и разрешения ТП: существенный этап создания изобретений. Необходимость овладения методами активизации (творческий уровень изобретения). Метод "проб и ошибок" (Эвристика). Брейнсторнинг. Синектика. Метод "контрольных вопросов". Морфологический анализ. Алгоритмическая методика (АРИЗ). "Изобретающая машина".
7. Конструкторский бизнеса.
Лекция 3 "Основы конструирования"
§ 3.1. Резюме Лекции 2.
ТО, Конструирование – логический мыслительный процесс (не исключающий, однако, элементов интуиции ![]() "озарение"):
"озарение"):
от абстрактно сформированного задания А (основного принципа) через функционирующие элементы (ФЭ)(Существующие ТР [элементы решений]) к желаемому результату (Рабочие принципу)![]() [КД].
[КД].
Т.е., конструирование направлено от сущности задачи к явлению, которое желают получить (вызвать).
Основы структуры конструирования как процесса – связь между ТЗ и наилучшим его вариантом (Решением) – которая позволяет определять основные положения (они не носят характер непреложных законов) для подразделения существенных рабочих этапов конструирования:
1) В ТЗ содержаться (в явной или не явной форме) необходимые и достаточные данные для всех возможных решений (Основной принцип);
2) Каждое отдельное решение является комбинацией функционирующих элементов (ТР), характеризуемых определенным действием;
3) Каждое решение имеет недостатки (ошибки), число которых возможно минимизировать;
4) ТР с минимальным числом недостатков является оптимальным.
Эти положения определяют строгую (единственно возможную) последовательность действий при конструировании объектов: повторения (возвраты) допустимы и необходимы.
Отсюда следует основные этапы конструирования как процесса:
I. Проанализировать ТЗ: сформулировать Основной принцип.
II. Выявить ТР, целесообразные комбинации которые дают все возможные решения задачи (Рабочие принципы) ;Þ Мыслительный образ объекта.
Содержание:
– Анализ существующих конструкций и принципов их работы – выявление ТР–это единственный путь:
В КД и действующей конструкции ТР воплощены в определенной совокупности узлов, деталей или их элементов (Вспомним пример – Шестерня), они как бы "теряются" в этой массе. В процессе анализа выявляются ТР, являющиеся основой построения детали, узла или объекта в целом.
NB. ТР – основа для сравнения и оценки разных объектов: всю разработку в целом сравнить трудно, особенно если объект сложный и включает в себя разные узлы и системы: электрические, гидравлические, мех. передачи и др. Сравнению поддаются ТР, к которым можно применить общий критерий, характеризующий Основной принцип.
III. Найти содержащиеся в каждом решении недостатки и принять меры к уменьшению их количества (ошибки должны быть исключены полностью) или их действия (Улучшенные рабочие принципы).
Содержание:
– Мысленные эксперименты (при недостаточном опыте – эскизная проработка): перестановка и замена элементов объекта; оценка эффективности изменений – их влияние на конечный результат.
Выявить ТР с min–min числом недостатков – путем сравнительной оценки (Оптимальный рабочий принцип).
IV. Изготовить КД для практической реализации объекта (Как –min– Рабочий чертеж).
NB. Еще раз следует подчеркнуть, что эффективность применения методики (методик) конструирования во многом зависит как от обычной способности к мышлению, так и от ряда определенных качеств ( в т.ч. и профессиональных) личности конструктора.
К сожалению подробное рассмотрение этих вопросов выходит за рамки программы курса "ОК": это – вопросы из "Психологии творчества".
Можно назвать основные: –
n живое человеческое мышление, управляемое диалектической логикой \* и включающее системный подход [!]\**.
n образное мышление и творческое воображение.
Все эти качества – дело наживное: они формируются и развиваются в процессе деятельности на основе трех "само...":
–самообразование (...воспитание);
–...анализ;
–...оценка.
\** В настоящее время в области инженерии (Инженерная Деятельность) наиболее дефицитна (престижна) третья категория инженеров: системотехник ( или "универсалист") – инженер широкого профиля, задачи которого – организация и управление инженерной деятельностью и создание сложных технических систем (1к – производственник; 2к – исследователь–разработчик).
\* Принципы:–
–принцип первичности материального;
–принцип всеобщей взаимосвязи;
–принцип развития.
§ 3.2. Рассмотрим более подробно основные этапы процесса конструирования.
I. Анализ ТЗ проводится на основании :
–требований к объекту конструирования;
–общих правил конструирования (см. Орлов кн.1, 1977г, стр. 63...67=52).
I.1. Основные требования к объекту конструирования.
Разработка (Проектирование, конструирование) технических объектов связанна с конкретными,–
–производственной необходимостью;
–и бытовыми потребностями человека.
Подготовка производства (конструкторская ПП–часть), изготовление и эксплуатация объекта, в свою очередь, происходят в конкретных производственных и эксплуатационных условиях.
Это вносит определенные ограничения в работу конструктора, с которым он всегда должен считаться в процессе конструирования: "обузды–вать фантазию".
В противном случае – без учета ограничений, приходится всегда вносить изменения в конструкцию при изготовлении и эксплуатации, а это Þ дополнительные затраты труда и материалов.
Перечислим основные требования к объекту, которые должны обеспечивать max. его соответствие конкретным условиям применения:
À – соответствие своему назначению и высокая производительность; высокое качество, надежность и ремонтопригодность. Результат выполнения этих требований – обеспечение назначенного (гарантийного) ресурса;
Á – удобство применения, функциональные свойства, необходимые для выполнения нужных операций; (специализация или универсальность)
 – соответствие конструкции объекта условиям изготовления его конкретными технологическими способами, на конкретном производстве в конкретном количестве. (Литье, штамповка, сварка и т.д.; – единичное – серийное – массовое; одно – серия (и) – много).
Это требование диктуется экономической целесообразностью;
à – возможность изготовления объекта на конкретной производственной базе предприятия–изготовителя с min–min затратами (конструктор должен учитывать имеющиеся:
–оборудование, инструмент, оснастку для изготовления, сборки и контроля;
–квалификация персонала и состояние технологической дисциплины и т.п.).
Ä – соответствие конкретным условиям технологической подготовки производства (это – материалы, полуфабрикаты, заготовки, ПКИ (ГИЗы) Î их наличие и дефицитность).
Основа выполнения этого требования – согласования КД со службами (Предприятиями и организациями), участвующими при изготовлении.
Для выполнения этого требования проводится входной конструкторский, технологический и норма–контроль КД, полученной из др. Организаций и Предприятий.
Å – соответствие требованиям СТ (ГОСТ, ОСТ, СТП),ТУ, Правил, Инструкций, Норм, так называемые Нормативно–технические материалы, например, – ССБТ; П. без–й эксил ГПК; ПУиБЭ сосудов РД; ПУЭ и т.д. и т.п.
Æ – КД на объект должен соответствовать требованиям ЕСКД.
На что надо обратить внимание, это:
–не давать в чертежах технологических указаний (за исключением – когда технология единственная);
–не забывать указывать все Тех. Требования на изготовление, контроль (измерения) и испытания объекта.
Кроме того в процессе изучения и анализа ТЗ конструктор:
–наводит справки;
–знакомится с литературой;
–изучает чертежи, приложенные к ТЗ, и аналогов;
–уточняет ТТ к объекту и выясняет ограничения (условия, которые обязательно должны быть соблюдены при решении задачи).
Результат I этапа ![]() – уяснение цели конструирования (основного принципа работы объекта);
– уяснение цели конструирования (основного принципа работы объекта);
–Подтверждение того, что эта цель в ТЗ сформулирована правильно.
В противном случае – конструктор обязан обоснованно доказать необходимость корректировки ТЗ: ошибка разработчика ТЗ может привести, как min – к неверному направлению разработки объекта; max – к разработке негодной конструкции.
Лекция 4. Основы конструирования.
Этап II – Выявление ТР, целесообразные комбинации которые дают все возможные решения задачи (Рабочие принципы) Þ Мыслительный образ объекта.
Содержание:
–Анализ существующих конструкций и принципов их работы – выявление ТР, – это единственный путь:
В КД и действующей конструкции ТР воплощены в определенной совокупности узлов, деталей или их элементов (вспомним пример –Шестерня...), они как бы "теряются" в этой массе. В процессе анализа выявляются ТР, являющиеся основой построения детали, узла или машины в целом.
NB. ТР – основа для сравнения и оценки разных объектов: всю разработку в целом сравнить трудно, особенно если объект сложный и включает в себя разные узлы и системы (электрические, гидравлические, мех. передачи и др.). Сравнению поддаются ТР, к которым можно применить общий критерий, характеризующий Основной принцип.
При этом рекомендуется руководствоваться следующими соображениями:
– Следует идти от необходимого к желаемому, а от желаемого к допустимому.
Качество конструкции объекта зависит от качества идеи или принципа, использованного в ТР объекта. Следует находить побольше ТР для выбора наилучшего; разрабатывать варианты известных ТР... ;стремиться выяснить все необходимые детали, способные повлиять на конструируемый объект.
Оценивать сравнительную важность каждого варианта, чтобы облегчить выбор оптимального или создать компромиссный. Избегать поспешных решений и чрезмерного влияния авторитетных решений. Правильно оценивать результаты расчетов и рационально их использовать.
– Добиваться простоты конструкции. Например, если предполагается ввести новый узел или изменить уже существующий, надо уточнить, нельзя ли вообще обойтись без них.
Избегать сложных, многодетальных конструкций. Не использовать в конструкции объекта элементы (узлы и механизмы), работоспособность которых сомнительна и требует экспериментальной проверки.
NB – Улучшение конструкции по некоторым параметрам за счет ухудшения качества, надежности и безопасности работы ее недопустимо.
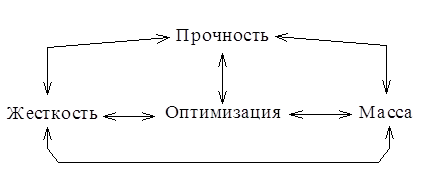
Требования предъявляемые к конструкции обычно противоречивы. Поэтому, улучшая один параметр объекта, конструктор влияет на др., нередко ухудшая их. Важно оценить эти влияния, принимая компромиссное решение, которое в конкретном случае будет оптимальным.
При оценки требований, предъявляемых к объектам разработки, необходимо учитывать следующее:
– Уменьшение массы объекта вызывает уменьшение прочности и жесткости.
– Компактная, малогабаритная конструкция влечет за собой улучшение условий сборки, обслуживания, регулировки и ремонта.
– Применение дешевых материалов вызывает ухудшение прочности, износостойкости и долговечности.
– Создание простой конструкции объекта накладывает ограничения на технические и технологические возможности его работы.
– Увеличение скорости действия механизма приводит к росту инерционных сил и нагрузок на детали и узлы.
– Разбивка конструкции на модули (узлы) для облегчения организации их сборки (или транспортировки) ведет к уменьшению жесткости конструкции, повышает трудоемкость сборки.
– Создание конструкции для разных режимов работы и разных операций (универсальной) наносит экономический ущерб при эксплуатации объекта на одной операции.
Для нахождения лучшего конструктивного решения конструктор должен создать как можно больше вариантов конструкции, т.к. в каждом варианте возможно решение тех или иных вопросов в разной степени.
Следует заметить, что разработка принципиально различающихся вариантов дело непростое. Кроме знания большого объема различных ТР, конструктивных схем и т.д. требуются способности и навыки использование приемов и методов конструирования.
Существуют методы, которые активизируют и направляют творческое мышление на пути создания новых, нешаблонных, нестандартных решений. Конструктору полезно знать эти методы (и учиться использовать их).
Приведем основные:
Инверсия (сделай наоборот) – метод получения нового ТР путем отказа от традиционного взгляда на задачу. При этом взгляд на задачу осуществляется обычно с диаметрально противоположной позиции. Если говорить об элементах объект, то они обычно меняются местами.
Принцип инверсии: –
– С наружи – изнутри;
Вертикально – горизонтально;
Вертикально – вверх дном (вверх ногами);
С лицевой стороны – с обратной стороны;
Поверхность охватывающая – поверхность охватываемая;
Симметрично – асимметрично;
Ведущее – ведомое;
Жидкое – твердое;
Вредное – полезное;
Жесткое – гибкое;
Растяжение – сжатие (Пример ?!).
Элемент на одной детали – Перенести на др. деталь, взаимодействующую с первой; и т.д. и т.п.
Аналогия (метод прецедента) – использование ТР из др. областей науки и техники. Аналогичные решения, используемые для решения инженерных задач, могут быть заимствованы из живой природы как конструкции и элементы биомеханики.
Метод прецедента использует аналогию с ранее разработанными конструкциями.
Аналогия может не только использовать ранее созданные конструкции, но и моделировать разные качества: форму, цвет, звук и т.п.
Эмпатия – отождествление личности конструктора с объектом разработки, т.е. элементом или процессом: "вхождение в образ". Этот метод приводит к новому взгляду на задачу.
Комбинирование – использование в конструкции в разном порядке и в разных сочетаниях отдельных ТР, процессов, элементов. При этом можно найти новое качество, дополняющий положительный эффект.
Метод комбинирования может применяться по трем схемам объединения элементов:
новое + новое,
новое + новое,
старое + старое.
Комбинации элементов могут быть разного характера: мех. соединение, соединение через промежуточные элементы, дублирование, образования многоступенчатых конструкций и др.
Компенсация – уравновешивание нежелательных и вредных факторов средствами противоположного действия. Например, часто необходимо компенсировать влияние массы, сил инерции, трения, различные потери ... – это осуществляется с помощью компенсаторов (постоянных, регулируемых, автоматических, пружинных и др.).
Динамизация – превращение неподвижных и неизменных элементов конструкции в неподвижных и неизменных элементов конструкции в подвижные и изменяемой формы.
Агрегатирование – создание множества объектов или их комплексов, способных выполнять различные функции, либо существовать в различных условиях. Достигается путем изменения состава объекта или структуры его составных частей.
Способы агрегатирования:
n соединение агрегатов с самостоятельным объектом представляющим комплекс (транспортер с подвесными орудиями);
n агрегатирование присоединением, когда к базовой составной части могут присоединяться различные зависимые составные части;
n агрегаты, узлы, детали (например, агрегатные станки; поворотно–делительные столы + силовые узлы: механизм главного движения и механизм подач);
n агрегатирование изменением, когда в объекте могут применяться всевозможные варианты составных частей при различной компоновке (например, различные варианты кузова автомобиля на одном шасси ...).
Компаундирование – состоит с том , что для увеличения производительности параллельно соединяются два технических объекта. Соединение производится различными приемами:
n объекты устанавливаются независимо параллельно и связываются синхронизирующимися устройствами;
n ... конструктивно объединяются в один агрегат и т.д.
Блочно–модульное конструирование – предусматривает создание изделий на основе модулей и блоков. Модуль – составная часть изделия, состоящая преимущественно из унифицированных или стандартных элементов различного функционального назначения (например, М. С. У.).
Резервирование (дублирование) – увеличение числа технических объектов для повышения надежности изделия в целом.
Мультипликация – повышение эффективности за счет использования нескольких рабочих органов, выполняющих одни и те же функции (по местам; многодетальная обработка; многоэтажные конструкции; многослойные конструкции и т.п.).
Метод расчленения – заключается в мысленном разделении традиционных технических объектов с целью упрощения выполняемых или функций и операций. Секционирование предполагает дробление ТО на конструктивно подобные составные части – секции, ячейки, блоки, звенья.
Ассоциация – использование свойства психики при появлении одних объектов в определенных условиях вызывать активность других, связанных с первыми. Совпадение определенных признаков разных объектов позволяет найти нехарактерные решения. (Например, мех. манипулятор, имитирующий работу руки ...).
Идеализация – падение реальных объектов нереальными, неосуществимыми свойствами и изучение их как идеальных (точка, линия, абсолютно твердое (черное) тело и др.). Этот метод позволяет значительно упростить сложные системы, обнаружить существенные связи и применить математические методы исследования.
Перенос свойств (или метод "фокальных" объектов) – конструируемый объект помещают в "фокус" внимания и переносят на него свойства или функции нескольких произвольно выбранных объектов.
Совокупность комбинаций найденных ТР – основа для создания конструкции объекта.
Следующий этап (III) – анализ вариантов и выбор оптимального – труднейший и самый ответственный этап конструирования. От результатов его выполнения зависит качество объекта на всех стадиях жизненного цикла.
? – Язык конструктора. –?
? – Источники информации. –?
?? – специальный научно–технический язык терминов.
Термин (от лат. terminus – граница, предел) – слово или сочетание слов, употребляемое с оттенком специального значения. Система терминов–терминология.
Конструкторский язык – терминология, при внимательном рассмотрении обнаруживает свою образную первооснову:
ось – палец – вал – вал ^ муфта
стакан – гильза ^ патрон
баба – бабка ^ пиноль
гитара
хвостовик.
Образный смысл терминов помогает глубже понять их содержание [и способствует развитию творческого воображения]. Однако, следует заметить, увлечение образами создает заряд психологической инерции, которая может препятствовать поиску новых ТР. Поэтому при решении конструкторских задач нужна большая независимость от конкретных технических средств.
Источники [научно–технической] информации.
Роль технической информации при конструировании огромна.
Конструктор творчески перерабатывает имеющиеся в его распоряжении (арсенале) или заимствованные из технической литературы информацию, существующие ТР, приспосабливая их к конкретным условиям.
Чаще всего в структуре разработанного объекта отсутствуют существенно новые ТР (изобретения). Это объясняется тем, что конструкторы, решая например, задачу повышения уровня технического оснащенности м/с, на многих предприятиях отрасли занимаются одними и теми же проблемами: Ежедневно происходит повторение одних и тех же конструктивных решений.
Бурный рост объема НТИ: удвоение в течении семи лет (в середине 80–х в нашей стране общее число информационных документов составляло в год ³ 10 млн. Экземпляров), – все больше затрудняет поиск и изучение необходимого.
Парадокс. Поэтому – как правило, легче разработать новый объект, чем убедиться, что такое где–то уже существует. (изобретение велосипеда).
В то же время – изучение и накопление положительного опыта конструирования – жизненная необходимость, особенно для молодых специалистов.
Т.к. стремление освоить всю предыдущую информацию – тщетно!!!, то – выход: изучать информацию по конкретным актуальным для данного специалиста вопросам, начиная с новейших достижений и кончая ретроспективной информацией.
СПЕЦИАЛИЗАЦИЯ.
"УЗКИЙ" специалист.
Результат изучения информации Þ обеспечение Конструктивной преемственности – использование при разработке предшествующего опыта по профилю специализации и смежных отраслей, введение в конструкцию разрабатываемого объекта всего полезного, что имеется в существующих конструкциях.
Основные источники НТИ:
Техническая литература: Учебники; Справочники конструктора (межотраслевые и отраслевые); Энциклопедии технические ( универсальные и отраслевые); Словари терминологические и разъяснительные; Типажи машин и оборудования и т.п.
Производственно–техническая информация – информация о новейших достижениях научной и производственной практики: Обзоры; Реферативные издания; Экспресс–информация; ИЛ; Бюллетени; Типовые РМ и в том числе изобретения и т.п.
–Н–ТД – ГОСТ, ОСТ, СТП, ТУ, РТМ, ТО и др.;
–Патенто–лицензионная информация (о содержании – в разделе Патентоведение).
БНТИ Þ помощь Специалистам.
Лекция 5. "Основы конструирования".
III. Анализ вариантов конструкции и выбор оптимального варианта.
II этап заключается в подборе и разработке вариантов, относящихся к объекту и принципу работы.
III этап Þ принятие одного, окончательного варианта.
Важно отметить, что принятие конкретного варианта имеет решающее значение на всех стадиях разработки. Оптимальное решение придает направление всей разработке.
Вероятность выбора оптимального варианта ... тем выше, чем больше число вариантов, из которых выбирается это решение, и чем выше качество этих вариантов.
Как мы сказали ранее, основа для отбора ТР – требования (ТЗ) к разрабатываемому объекту. Эти требования могут предъявляться к объекту в целом или к его составным частям и функциональным элементам.
Как требования к объекту, так и варианты ТР нередко являются противоречивыми. Противоречивость вариантов может иметь самую различную степень, вплоть до взаимного исключения.
В любом случае выполняется проверка совместимости принимаемых решений по разным частям конструкции и принципам работы конструируемого объекта.
В случаях, когда имеется определенное число вариантов и выбор наилучшего (оптимального) не очевиден, на помощь конструктору приходит метод оптимизации.
Оптимальным решением задачи назначается решение, которое по тем или иным признакам предпочтительнее.
Отсюда следует: чтобы среди большого числа вариантов найти оптимальный, нужна информация о предназначительности различных сочетаний значений показателей характеризующих варианты,– критерий оптимизации.
Задача выбора оптимальных параметров разработки в соответствии с выбранными критериями называется задачей оптимального проектирования (конструирования).
Здесь следует отметить, что под оптимальным проектированием (чаще всего) понимается процесс принятия оптимальных (в некотором смысле) решений с помощью ЭВМ. Эта проблема, связанная с получением оптимального решения из множества допустимых, является общей для всех стадий разработки и во многом определяет технико–экономическую и технологическую эффективность разрабатываемых (конструируемых) объектов.
Рассмотрим некоторые положения теории оптимального проектирования.
Процесс оптимального проектирования включает в себя три основных этапа:
1) выбор объективного критерия оптимизации;
2) описание целевой функции и множества (области) допустимых решений (математическое моделирование объекта);
3) выбор эффективного метода решения задачи и его реализация.
À Критерий оптимизации конструируемого объекта служит показатель, который оптимален для данного объекта.
Выбор критерия определяется следующим:
n критерий–средство, с помощью которого должны сопоставляться конкурирующие варианты конструкции объекта;
n критерий должен выражать соответствие между целесообразным качеством объекта и реальными процессами конструирования, изготовления и эксплуатации объекта.
Критерий предназначен не для того, чтобы "заменить цель поставленной задачи", а для того, чтобы проверить предпочтительность выбранных вариантов.
Критерий должен быть объективным и оправдывать свое назначение. Для этого он должен обладать рядом свойств:
n быть независимым;
n быть однозначным, т.е. не являться функцией других факторов;
n быть непосредственно связанным с параметром оптимизации;
n быть совместимым с другими факторами, чтобы не нарушать их работу и др.
В качестве критерия оптимизации в зависимости от характера и назначения объекта конструирования могут быть приняты:
n его стоимость;
n конструктивные и точностные показатели;
n масса (вес);
n долговечность (ресурс) и др.
Á Оптимизация как процесс рационализации элементов конструкции возможна только тогда, когда сформулирована цель.
При решении задач оптимизации математическими методами : математическая зависимость критерия оптимизации от искомых параметров объекта носит название целевой функции .
Название не случайно : оптимизация проводится с целью получения наилучшего значения критерия оптимизации .
* Z=Z(X,U) ® min , [ x1,...,xn ] =X
- n искомых параметров объекта ;
- Ui(t) - неизвестные функции конструирования.
Пространства , в которых изменяются X,U - назовём пространствами проектирования .
*- условие min функционала , определяющее выбранный критерий - есть критерий оптимальности .
Функционал - ( в вариационном исчислении ) математическое понятие, означающее переменную величину , зависящую от выбора одной или нескольких функций .В общем смысле - оператор , отображающий бесконечно мерное пространство , в множестве действительных или комплексных чисел .
Параметры оптимизации :
В качестве искомых параметров объекта могут служить любые численные значения :
- принцип работы изделия ( н .)
- технические показатели ( Vmax или Vmin ; производительность; to ; M и др.);
- показатели качества ( Qu; HRC - поверхности вала и тп .).
Параметры оптимизации должны соответствовать следующим требованиям,-
- поддаваться измерениям с достаточной степенью точности и ограничиваться пределами допусков ;
- быть информационными , т.е . всесторонне характеризовать объект;
- иметь физический смысл , т.е. должна быть возможность достижения полезных результатов определенного свойства объекта в соответствующих условиях;
- быть однозначными т.е. максимизировать или минимизировать только одно свойство объекта .
Параметры оптимизации в зависимости от цели , для которых они предназначены , могут быть ,-
- пространственно – временными ( длина ; время ; площадь ; объём ; скорость ; ускорение и т.д. );
-механическими (масса , плотность, сила , момент силы , работа , энергия , мощность , давление и т.д.);
- электромагнитными (количество электричества, плотность тока, удельное сопротивление ,магнитный поток и т.д.);
- тепловыми ( to , количество теплоты, тепловой поток, коэффициент теплообмена и т.д.);
- акустическими ( звуковое давление , интенсивность звука и т.д.);
- качественными (внешний вид , качество поверхности и т.д.) .
В задачах оптимизации к критериям оптимальности обычно приходится присоединять ограничения , чтобы сузить пространство проектирования (это не только системы математических уравнений , но и логические выражения типа ² если ... то ... ² ).
Основные ограничения для механических конструкций :
1) на величину напряжений ( мех. ) , налагаемые требованиями надёжности и экономичности ( условия прочности и устойчивости );
2) на перемещение элементов , налагаемые требованиями жёсткости , работоспособности действующей НТД (условия жёсткости );
3) условие совместности деформаций : неразрывность элементов конструкции при действии внешних нагрузок ;
4) функциональные ограничения , связанные с условиями и эксплуатации элементов объекта ( Н , габаритные ограничения , материал , сортамент , крепёж и т.п.)
 Задача о минимуме функционала при заданных ограничениях в общем случае является задачей теории оптимальных систем с определёнными параметрами , описываемой системой дифференциальных и интегральных уравнений . Единого метода решения столь общих задач не существует .
В основном применяются ,– аналитические (дифференциальные и вариационные исчисления ) и ,– численные методы (линейное , нелинейное и динамическое программирование ; метод ветвей и границ .
eЭвристическое программирование в системе человек – ЭВМf
I оптимизация по нескольким ( многим ) параметрам при помощи ЭВМ .
II Если удаётся выделить один главный параметр , который достаточно полно характеризует объект оптимизации , применяются методы отличающиеся более простыми вычислительными процедурами .
!!! Решение задач оптимизации математическими методами даёт наилучшие результаты . Однако не всегда возможен выбор математических методов оптимизации с использованием ЭВМ .
Ограничения : отсутствие СВТ и соответствующих специалистов ; кроме того , не все задачи оптимизации имеют математическое решение .
По этому конструктор , работающий на промышленном предприятии , 1), применяет т.н. вариантное конструирование ( сравнение нескольких вариантов конструкции и выбор варианта с минимумом недостатков ); 2), выполняет оптимизацию на интуитивном уровне .
Ведь задачи оптимизации приходится решать не только при определении основных параметров объекта , но и по многим второстепенным вопросам .
Любой выбор конструкторского решения формы и размеров элементов объекта – решение оптимизирующей задачи , когда конструктор выбирает оптимальное решение из той совокупности вариантов , которые хранятся в его памяти . Эти варианты удовлетворяют ТЗ на конструкцию ,т.е. находятся в допустимой области . Знание конструктором основных критериев и методов конструирования позволяет делать правильные логические выводы .При этом помогает модель конструируемого объекта – мыслительный образ (в воображении конструктора ) или графическое изображение (схема , эскиз ). Модель отражает упрощённую принципиальную схему , которую в процессе конструирования обрастает IP. Здесь на помощь конструктору приходит ² мыслительный эксперимент ² : например, проводится ² нагружение ²образца на основе чего определяется рациональное поперечное сечение , и т.п.
Знание методов оптимизации , опыт работы , способность творчески мыслить позволяют конструктору избежать недостатков и ошибок в конструкции объекта .
Основные параметры .
При конструировании оптимизацию целесообразно выполнять по следующим (основным) параметрам ,–
– 1. Оптимизация нагружения – самый главный параметр, который определяет конструкцию объекта : равнопрочность, оптимальное использование материала, надёжность и т.д.
– 2. Оптимизация материала зависит от конструкции объекта. Применяемый материал может быть различным, но его выбирают по необходимым механико-физическим свойствам, технологичности, стоимости, доступности и т.д.
– 3. Оптимизация надежности включает в себя показатели качества, коэффициент безопасности, точности и т.д.
– 4. Оптимизация отношений взаимосвязанных величин заключается в оценке следующих характеристик объекта : геометрические размеры (характеристики) , кинематические и динамические свойства, масса, упругие свойства и отношения между ними.
Анализ конструкций на технологичность
— выполняется при разработке технического (технорабочего) проекта объекта
— после разработки окончательных технических решений
— для оценки объекта по технологическим параметрам и отработки его на технологичность.
Чтобы улучшить технологичность изделий (для снижения себестоимости) выполняется технологический контроль конструкторской документации по ГОСТ 2.121–73.
Основной субъект, разрабатывающий конструкторскую документацию – чертежи, схемы, текстовые документы и др. – конструктор. Он определяет “лицо” сконструированного объекта : содержание конструкторской документации (КД) и все отраженные в них технические решения (ТР). За это он несет ответственность, оговоренную в Должностной инструкции, в соответствии с действующим законодательством.
Исходя из этого, в производственной практике наблюдается некоторая переоценка (мягко выражаясь) роли конструктора в создании конструкции объекта.
При этом сложилось антагонистические отношения между конструкторами и технологами: технолог “противник” конструктора, следовательно “ретроград”, тормозящий технический прогресс.
Эта недооценка роли технолога в конструировании объектов не приносила бы вреда, если бы конструктор владел всем объёмом технологических знаний и опыта.
Но – “нельзя объять необъятное”,–поэтому конструкторская документация (КД) – должна быть творчеством не одного исполнителя, а быть результатом совместной плодотворной работы разных специалистов.
И первое, ведущее место в этом процессе занимают технологи.
Качество КД и её технический уровень определяются тем, насколько тесным и плодотворным было это сотрудничество.
Технолог должен совместно с конструктором разрабатывать конструкцию объекта на всех стадиях разработки.
Это реализуется в отработке изделия на технологичность:
? Какие недостатки имеют эти технические решения с точки зрения технологичности
|
|
Технологичность конструкции и её виды.
(Основные определения).
В соответствии с ГОСТ 22851–77 “Показатели качества продукции” установлено 8 видов показателей качества, в т.ч. – показатели технологичности (назначения, надежности, …).
Главный критерий технологичности конструкции – её экономическая целесообразность при заданном качестве и принятых условиях производства, эксплуатации и ремонта. Критерий ® д/сопоставления вариантов и оптимизации.
Единые термины и определения в области технологичности конструкций устанавливает ГОСТ 18831–73 “Технологичность конструкции. Термины и определения”.
Стандартное определение технологичности конструкций сформулировано, исходя из принципа сокращения материальных и трудовых затрат во всех сферах проявления свойств конструкции объекта, и звучит так :
“Технологичность – совокупность свойств конструкции изделия, проявляемых в возможности оптимизации затрат труда, средств, материалов и времени при, —
— технологической ПП,
— изготовлении,
— эксплуатации и ремонте,
по сравнению с соответствующими показателями однотипных конструкций изделий того же назначения при обеспечении установленных значений показателей качества в принятых условиях изготовления, эксплуатации и ремонта”.
Отработка конструкции изделия на технологичность – комплекс мероприятий по обеспечению необходимого уровня технологичности конструкции изделия по установленным показателям.
Основная задача отработки – придание изделию комплекса свойств, устанавливаемым понятием (термином) технологичность.
Для решения этой задачи изделие необходимо рассматривать как объект разработки (по стадиям разработки) на всех стадиях жизненного цикла.
Так как технологичность изделий проявляется в процессе их производства и эксплуатации, таким образом , основными видами технологичности конструкции изделий являются (по области проявления) , —
* производственная технологичность (конструкторская и технологическая подготовка производства)
* эксплуатационная технологичность (т.о. и ремонт)
По характеризуемым свойствам, —
* технологическая рациональность конструкции (по виду затрат)
* конструктивно-технологическая преемственность (по форме проявления).
Основные требования и рекомендуемые решения при отработке конструкции на технологичность.
– 1. Обеспечение расчленения объекта на сборочные единицы. Сборочные единицы ® минимальное число деталей обеспе–чивает выполнение функций;
— возможность независимой параллельной сборки;
— принцип агрегатирования.
– 2. Обеспечение унификации и стандартизации элементов конструкции (сокращение номенклатуры деталей, ГИЗы).
– 3. Обеспечение рациональных сборочных баз (принцип единства баз).
– 4. Обеспечение рационального процесса сборки : ПВЗ ® НВЗ ® ГрВЗ (селект-сборка) ® регулировка компенсаторами ® пригонка.
– 5. Обеспечение удобства сборки (механизация и автоматизация; общая сборка без промежуточных разборок; доступ к местам регулирования и контроля; легкосъёмность быстроизнашивающихся деталей; >20 кг. – устройства д/ГПМ).
– 6. Обеспечение рациональных соединений составных частей (минимальное число соединений).
– 7. Обеспечение применения типовых технологических процессов: обработки, сборки, контроля и испытаний.
В комплексе технологичность рассматривается как совокупность свойств конструкции изделия, заложенных в конструкторской документации при разработке :
Рациональная конструкция º расчетной технологичности
Подробно процесс ОКИТ рассмотрен в “Методика отработки конструкций изделий на технологичность и оценки уровня технологичности изделий МС и ПС”. М : Издательство стандартов. 1976 г., 55 стр. ® ОСТ СТП.
На предыдущей лекции мы сказали :
если рассматривать технологичность объекта в комплексе, то она определяется совокупностью свойств конструкции объекта, заложенных![]() в КД при разработке.
в КД при разработке.
При этом для создания рациональной технологии изготовления (и сборки) необходима рациональная конструкция.
Рациональность конструкции во многом определяется такими показателями технологичности как, —
— масса (вес) изделия;
— удельная материалоемкость изделия.
В машиностроении уменьшение массы изделий позволяет снижать расход материалов (в основном металлических) и, соответственно, стоимость изготовления.
Здесь следует отметить : снижение массы изделий не является (и безусловно не должно быть) самоцелью. Снижение массы должно обеспечиваться без ущерба прочности, жесткости и надежности (долговечности) объекта.
Поэтому , учитывая ещё и достаточно малую долю стоимости материалов в общей стоимости объекта , в общем машиностроении нашей страны сохраняется тенденция (порой неоправданно): лучше иметь несколько более тяжелую машину, но надёжную и долговечную.
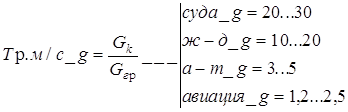
Сравнительные качества объектов одного назначения оценивают показателем удельная масса, равным

![]()
Этот показатель учитывает степень конструктивного совершенства объекта , а также – применение лёгких сплавов и неметаллических (К) материалов.
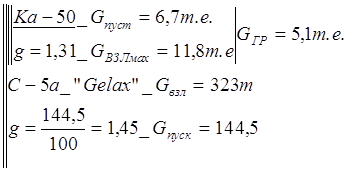
Например , качество конструкции металлорежущих станков оценивают показателем g = G / Nд , где G – масса, кг ; Nд – номинальная мощность приводного двигателя.
П. И. Орлов утверждает, что в этом случае, этот показатель “невыразительный”, т.к. не учитывает степень использования Nд, а также производительности станка.
![]()
![]()
Понятие материалоемкость отличается от понятия масса – они неравнозначны.
Материалоёмкость лучше всего выражать объемом элементов, составляющих бьем.
Тогда удельная материалоемкость – показатель качества конструкции :

![]() , где
, где ![]() – суммарные массы элементов, изготовленных из материалов с плотностью
– суммарные массы элементов, изготовленных из материалов с плотностью ![]() .
.
 –коэффициент использования объема.
–коэффициент использования объема.
Снижение массы и материалоёмкости объекта обеспечивается рациональной конструкцией элементов объекта, которая основана на следующих принципах, –
— рациональная форма сечения для каждого вида нагрузки – принцип равного напряжения сечения ;
— уменьшение концентрации нагрузки : обеспечение равномерного распределения напряжений в поперечных сечениях – принцип равнопрочности ;
— обеспечение рационального баланса жесткости – принцип относительной жесткости (т.к. равнопрочные детали при прочих равных условиях имеют меньшую жесткость) ;
— устранение СНС : 2–3 вида нагружения ; поперечный изгиб ® чистый изгиб ® кручение ® срез ® растяжение (сжатие) – принцип рационального нагружения. (Силовая схема) . А. Н. Т. : “Силу надо “ловить” там где она возникает”
— уменьшение неравномерности напряжений путём удаления материала из малонапряженных участков – принцип обсечения (снижаются инерционные нагрузки) ;
— применение рациональных конструктивных схем : минимальное число звеньев, компактность, многопоточные схемы ;
— уточнение расчетных напряжений (повышение за счет, например, экспериментального измерения и натуральных испытаний) ;
— выбор соответствующего материала (замена металлов ПКМ) , применение технологических методов упрочнения материалов.
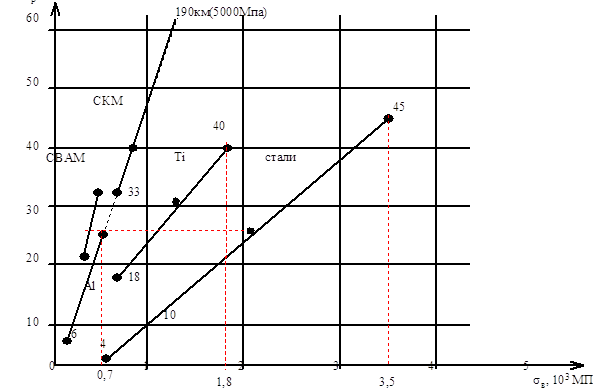
Выгодность материалов по массе можно оценить с помощью удельных показателей ,например, Lp = dв / g (для растяжения-сжатия), которая наглядно интерпретируется, т.н. “разрывной длиной” – длина свободно подвешенного стержня (км) , при которой материал разрушится от действия массовых сил.
![]()
А=s
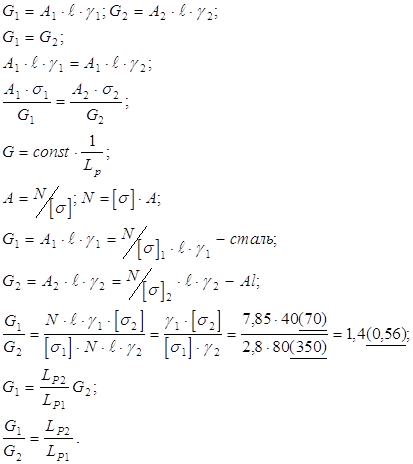
Следует отметить, что выбор материала определяется не только его массово-прочностными характеристиками , но и другими немаловажными факторами, —
– назначением и условиями работы детали ;
– физико-механическими, технологическими и эксплуатационными свойствами материала ;
– стоимостью (!) .
Вывод : наибольшей универсальностью обладают стали, свойства которых определяются в широких пределах легированием, термической, химико-термической и термомеханической обработкой.
Стали ещё долго будут основным материалом для изготовления нагруженных деталей.
Почти такими же свойствами обладают титановые сплавы (кроме обрабатываемости).
ПКМ выйдут на первое место только в случае обеспечения их стоимости на уровне металлических материалов (хотя бы титанов).
| Стали (констр) | Al – сплавы | Ti – сплавы |
| 0,33...0.63 руб/кг | 0,45...1,0 руб/кг | 1,0...5 руб/кг |
| 0,5 руб/кг ¯ 90 | 0,8 руб/кг ¯ 60 | 3 руб/кг ¯ 15 |
СВМ–45руб/кг+Экология
Жесткость конструкций. Конструктивные способы повышения жесткости.
Общее определение :
Жесткость – это способность системы сопротивляться действию внешних нагрузок с наименьшими деформациями (перемещениями).
Для машиностроения : жесткость – это способность системы сопротивляться действию внешних нагрузок с деформациями (перемещениями), допустимыми без нарушения работоспособности системы.
Таким образом , жесткость определяет работоспособность объекта в такой же мере (иногда большей) , как и прочность. И соответственно , определяет массу (материалоёмкость) конструкции.
Стремясь облегчить конструкцию и максимально использовать прочностные свойства материалов , конструктор повышает уровень напряжений в элементах конструкции, что приводит к увеличению деформаций (e = d / E).
Широкое применение равнопрочных, наиболее выгодных по массе конструкций , вызывает увеличение деформаций : такие конструкции имеют малую жесткость.
Вопрос повышения жесткости особенно актуален в связи с применением высокопрочных материалов, элементы из которых резко увеличивают деформативность конструкций.
Определить величину деформаций расчетными методами можно лишь при простых видах нагружения [ растяжение (сжатие), сдвиг (кручение), изгиб ] методами СМ иТУ.
В большинстве случаев приходится иметь дело с элементами конструкций, жесткость которых не поддаётся расчету : их сечения определяются технологией изготовления (например , литьё , прокат) или имеют сложную конфигурацию (корпусные детали).
Здесь применяются моделирование , эксперимент (испытания) , опыт и интуиция конструктора.
П. И. Орлов “ОК” отмечает : “... конструкции, разработанные начинающим конструктором, обычно “страдают” недостатком жесткости”.
Жесткость конструкции определяют следующие факторы :
— Е (растяжение-сжатие, изгиб) ; G (сдвиг, кручение) ;
— геометрические характеристики сечения (A,J(W),Jk(Wk));
— линейные размеры : длина L ;
— вид нагружения , тип (жесткость) опор.
Факторы, влияющие на жесткость, можно объединить в обобщенном удельном показателе жесткости
 Таким образом , этот показатель объединяет характеристики прочности и жесткости и характеризует способность материалов воспринимать высокие нагрузки при наименьших деформациях, и наиболее полно оценивает выгодность материалов по массе.
Таким образом , этот показатель объединяет характеристики прочности и жесткости и характеризует способность материалов воспринимать высокие нагрузки при наименьших деформациях, и наиболее полно оценивает выгодность материалов по массе.
Значения nl для основных конструкционных (металлических) материалов можно представить диаграммой
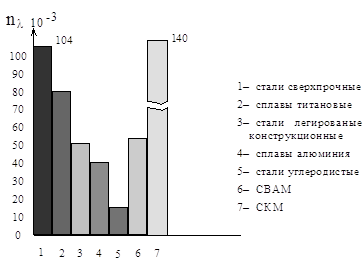
Мы знаем , что на практике , выбор материала , определяется не только прочностно-жесткостными характеристиками , но и технологическими и эксплуатационными свойствами.
Поэтому преимущественное значение в обеспечении прочности и жесткости (при минимальной возможной массе) имеют конструктивные меры (способы).
Конструктивные способы повышения жесткости без существенного увеличения массы —
— устранение изгиба , замена его растяжением или сжатием ;
— для элементов конструкций , работающих на изгиб , –рациональная схема опор ; увеличение J(W)
— усиление рёбрами, работающими предпочтительно на сжатие ;
— усиление опор, затяжка опор (опорных сечений) и участков перехода от одного сечения к другому
— блокирование деформаций (перемещений) введением поперечных и диагональных связей (фермы, рамы, расчалочные конструкции) ;
— привлечение жесткости смежных деталей ;
— для деталей коробчатого типа (базовые детали – станины) – применение скорлупных , сводчатых , сферических и т.п. форм ;
—  для деталей типа дисков – применение конических, чашечных, сферических форм ; рациональное оребрение, гофрирование ;
для деталей типа дисков – применение конических, чашечных, сферических форм ; рациональное оребрение, гофрирование ;
— для деталей типа плит – арочные, коробчатые, ячеистые и сотовые конструкции.
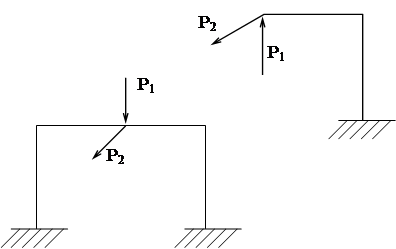
![]() Схема 1
Схема 1
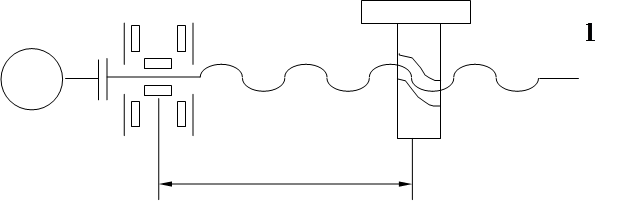
Приводной элемент ШУ расположен между опорами.
|
|
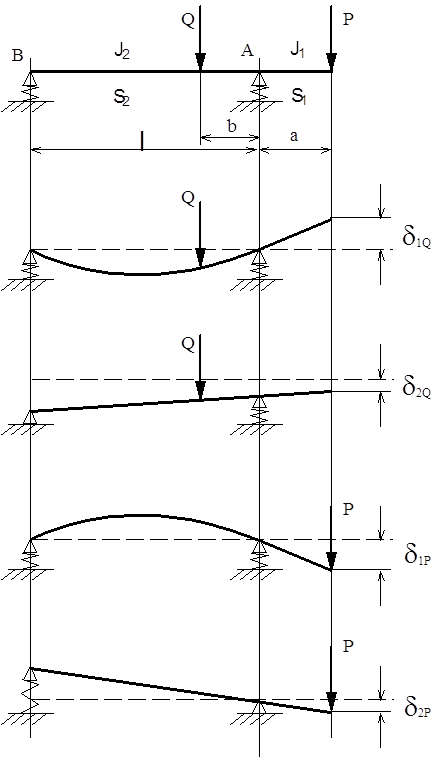
Эта схема типична для токарных, фрезерных станков и для многоцелевых станков с ЧПУ.
Радиальное упругое перемещение шпинделя в расчетной точке слагается из следующих перемещений:
d1Q– тела шпинделя от силы Q в ПЭ ;
d2Q – деформация опор от силы Q ;
d1Р – тела шпинделя от силы резания P ;
d2Р – деформация опор от силы Р.
l – межопорное расстояние; а –вылет шпинделя (консоль); в –расстояние от передней опоры до сечения ПЭ; J1–среднее значение осевого момента инерции консоли; J2 –среднее значение осевого момента инерции в МОР; S1 и S2 – площади поперечных сечений; Е–модуль Юнга материала шпинделя; G=E/[2(1+m)] – модуль сдвига; ja и jb– радиальная жесткость передней и задней опор; Є– коэффициент защемления в передней опоре.
Упругое перемещение переднего конца шпинделя, слагающееся из всех названных выше перемещений, но без учёта защемляющего момента:
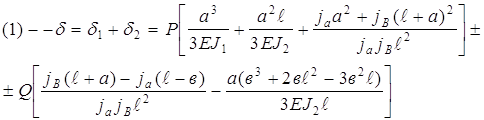
С учётом действия защемляющего момента в передней опоре перемещение переднего конца шпинделя:
Угол поворота (рад) в передней опоре:

![]()
В зависимостях (1) и (2) и в последующих под P и Q понимают составляющие сил, приведённые к одной плоскости.
Перед Q принимают знак (+), если силы P и Q направлены в одну сторону, и знак (–), если они направлены противоположно.
Введя в зависимости (1) и (2) безразмерное отношение l=l/a, характеризующая относительную длину межопорной части шпинделя, из уравнения dd/dl=0 находят lopt –оптимальное по условию жёсткости® и соответствует lopt.
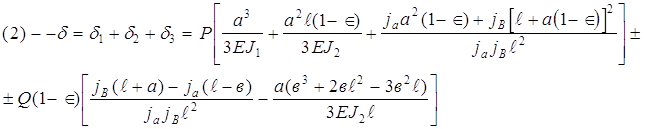
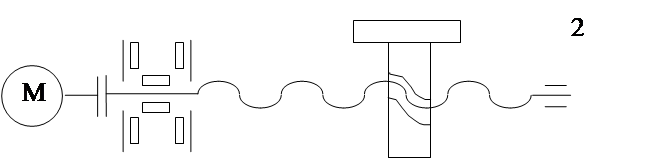
Схема . приводной элемент расположен на задней консоли на расстоянии С от задней опоры. Этот случай,– для внутришлифовальных станков и отделочно расточных головок.
Перемещение переднего конца шпинделя с учётом защемляющего момента в опоре шпиндельного узла:
P Q эквивалентно ![]() P¯ Q ® перед Q противоположный знак.
P¯ Q ® перед Q противоположный знак.
При e=0; d=d1+d2.
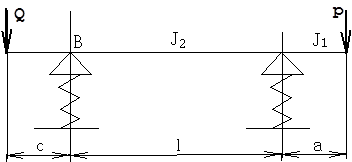
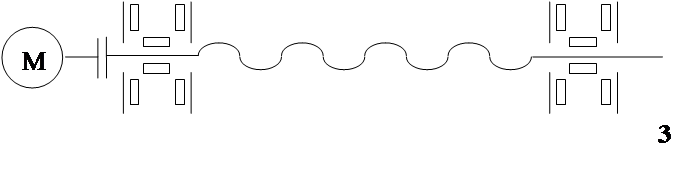
Схема ® . Шпиндель не нагружен силами от привода. (Например, мотор– шпиндели )®в прецизионных станках.
Расчеты базовых деталей на жесткость. Несущая система и базовые детали.
Несущей системой называется совокупность деталей и узлов МРС, обеспечивающих правильное расположение инструмента и обрабатываемой детали,– шпиндельный узел и базовые детали (узлы): станина (направляющие), стойки, корпуса коробки скоростей и подач, задние бабки, суппорты, планшайбы, столы, которые воспринимают силы резания при обработке.
Жесткость МРС связана с его компоновкой. Применяют жесткие замкнутые конструкции (предпочтительно – симметричные).
Для снижения величины деформаций применяют материалы с высоким модулем Е.
Для базовых деталей средних размеров и несложной формы рекомендуется–серый чугун СЧ 21–40 (HB 200...220).
Для тяжелонагруженных станин: марки СЧ 28–48 или СЧ 38–40.
Для специальных станков целесообразно корпусные детали выполнять сварными из низкоуглеродистой листовой стали (Ст3 и Ст4, dст=8...12 мм.
Применяют также железобетон.
Наиболее ответственными элементами станины являются направляющие.
Точность изготовления направляющих и стабильность отклонений от прямолинейности и плоскостности определяют точность обработки изделий.
В МРС применяют направляющие скольжения , качения и комбинированные.
НС с полужесткой смазкой, обладающие высокой контактной жесткостью, применяют в универсальных МРС, когда нецелесообразно применение более совершенных (и соответственно дорогих) типов направляющих.
В быстроходных и точных станках с ЧПУ применяют направляющие качения (НК) , комбинированные или ГСН (гидростатические).
Выбор конструкции и материалов НС с полужидкостной смазкой определяется требованиями, —
– точности движения по направляющим рабочего узла;
– жесткости;
– min сил трения в направляющих.
Направляющие рассчитывают на , —
* износостойкость,
* жесткость.
При расчете на износостойкость определяют max – давление между трущимися поверхностями и сравнивают с допускаемым давлением, которое для крупных направляющих МРС нормальной точности принимается [ P ] max = 2,5...3 MПа;
– для прецизионных и тяжелых МРС [ P ] max = 1...2 MПа;
– для шлифовальных станков (условия абразивного износа), [ P ] max = 0,05...0,08 MПа.
В расчете на жесткость определяется смещение инструмента по направлению , которое более всего влияет на точность обработки.
Для этого определяют средние давления на направляющие от сил резания и веса подвижного узла.
Принимают допущение, что контактные перемещения в направляющих прямо пропорциональны средним давлениям.
Используя нормированный коэффициент контактной податливости С = 10 мкм мм2 Н-1 , определяют смещение инструмента d , обусловленное поперечным и угловыми перемещениями подвижного узла.
N. B. Значение d должно составлять часть 10% из общего баланса допускаемого отклонения размера обрабатываемой детали , которые отводятся для несущей системы МРС.
Расчеты направляющих приведены в учебной и справочной литературе, например Кочергин А. И. “К и Р МРС и СК”;”Курсовое проектирование. Учебное пособие для вузов” — Мн: “ВШ”,1991 г, стр. 264...298.
Тяговые устройства (ТУ) – предназначены для перемещения подвижных узлов станка по направляющим.
К ТУ предъявляются следующие основные требования, —
* высокая чувствительность для обеспечения малых перемещений без скачков;
* обеспечение заданного закона движения;
* быстродействие при переходных процессах;
* большая жесткость , которая определяет точность обработки на статичных и динамичных режимах;
* беззазорность передач: особенно в случаях закономерных нагрузок и при автоматизированной обработке.
В автоматизированных МРС применяют следующие типы ТУ :
В–Г К , кулачковые механизмы, гидростатические передачи В–Г ,следящие гидроприводы (ГЦ) и др.
Перспективными , особенно для станков с ЧПУ , являются линейные ЭД , применение которых позволит исключить все названые виды передач.
Тяговые устройства привода подачи.
Передача винт–гайка качения обладает свойствами , позволяющими применять её как для привода подач без отсчета перемещений (универсальные МРС, силовые столы агрегатных станков) , так и в приводах подач и позиционирования станков с ЧПУ.
Для ПВ–ГК характерны, —
* высокий КПД (0,8...0,9);
* небольшое различие между силами трения движения и покоя
* изначальное влияние частоты вращения винта на силу трения в механизме;
* полное отсутствие осевого зазора.
Недостатки : высокая стоимость , пониженное демпфирование , отсутствие самоторможения.
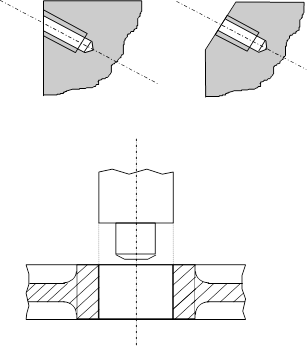
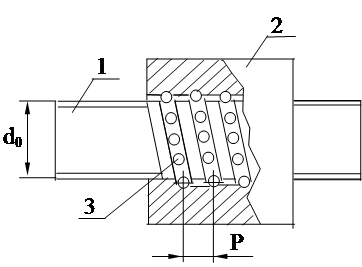
Устройство и размеры передачи. ПВ–ГК состоит из винта 1 , гайки 2 , шариков 3 и устройств для возврата шариков.
 | |||
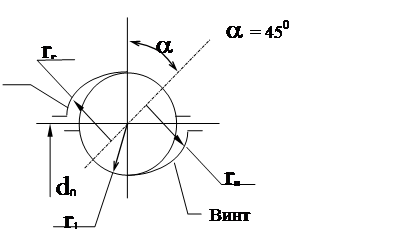 | |||
Обычно применяют передачи с наиболее технологичным полукруглым профилем резьбы : rв = rг » (1,03...1,05) r1 – для снижения контактных напряжений.
Размеры элементов ПВ–ГК стандартизованы (ГОСТ 25329–82).
Расчет передачи винт–гайка качения (В–ГК).
Исходные данные и цель расчета.
ПВ–ГК выходит из строя в результате , —
* усталостного разрушения поверхностных слоёв шариков , гайки и винта;
* потери устойчивости винта;
* износа элементов передачи и снижения точности.
Возможные причины, —
* слишком большая нагрузка на винт;
* низкая расчетная долговечность;
* значительный относительный перекос В и Г;
* неудовлетворительная защита от загрязнений.
Цель расчета ПВ–ГК состоит в определении номинального диаметра винта d0 и в подборе по каталогу такой передачи, которая удовлетворяла бы всем требованиям работоспособности.
Исходные данные , —
* длина винта, наибольшая расчетная длина;
* способ установки на опорах;
* ряд значений осевой нагрузки, которые определяются для различных операций, выполняемых на МРС;
* ряд частот вращения В(г).
Можно исходить из величины крутящего момента на ходовом винте
М = Мд * h / i где:
Мд – крутящий момент на валу ЭД;
h – КПД передачи от ЭД к винту;
i – передаточное отношение этой передачи.
Осевая сила действующая на винт,
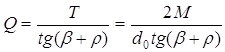 , где
, где  – угол подъема резьбы;
– угол подъема резьбы; ![]() угол трения (f=(57..85)10–5–коэффициент трения качения)
угол трения (f=(57..85)10–5–коэффициент трения качения)
Предварительный выбор параметров передачи.
Предварительно передачу выбирают по осевой нагрузке, конструктивным и технологическим соображениям.
Затем проверяют усталостную прочность рабочих поверхностей винта и гайки по критериям усталости и осевой жесткости.
Номинальный диаметр винта d0 принимают равным L/(20...25), где L –длина резьбовой части винта.
Расчет на жесткость. Потребный номинальный диаметр винта d0 можно определить из условия обеспечения жесткости привода , которая связана с жесткостью шарико-винтового механизма jм , винта jв и его опор j0 :
Осевая жесткость привода оказывает влияние на виброустойчивость. Чтобы исключить резонансные явления, собственную частоту колебаний механической части привода f = (3...3,5) f1 , где f1 – частота импульсов, вырабатываемых системой измерения перемещений.
Для крупных станков f1 = 10...15 Гц
для средних и малых f1 = 15...25 Гц.
Исходя из условия f = (3...3,5) f1 ,потребная жесткость механической части привода
j = 4 * 10–6 * p2 * f2 * m (Н/мкм) , где
m – масса узлов механической части привода (ходового винта, исполнительного узла и установленных на нём приспособлений, заготовки), кг.
Жесткость шарико-винтового механизма (с предварительным натягом и возвратом шариков через вкладыши при r1/r2=0,96) :
![]()
где Кd = 0,3...0,5 – коэффициент учитывающий погрешности изготовления резьбы гайки , а также жесткость стыков винтового механизма;
U – число витков резьбы в гайке;
d0 – номинальный диаметр винта , мм;
р – шаг резьбы , мм;
 , Н – допустимая сила натяга, отне–
, Н – допустимая сила натяга, отне–
сённая к одному шарику , где Кz = 0,7...0,8 – коэффициент учитывающий погрешности изготовления резьбы винта ; Z1 – рабочее число шариков в одном винте; a – угол контакта шариков с винтом и гайкой; b – угол подъёма резьбы.
Наименьшая жесткость ходового винта зависит от способа установки его на опорах.
| |||||
| |||||
 | |||||
 , H/м , где
, H/м , где![]() –наибольшее расстояние от опоры винта до середины гайки, м; d0 ,н; E–модуль упругости материала винта, МПа.
–наибольшее расстояние от опоры винта до середины гайки, м; d0 ,н; E–модуль упругости материала винта, МПа.
¬–одностороннее закрепление;
–с дополнительной опорой.
® 
Приближенное значение жесткости опор винта
j0=ed0 , H/мкм , где е=5,10,10 соответственно д/РУ ,шариковых и роликовых опор.
d0 –гарантирует осевую жесткость привода
Лекция 15. "Основы конструирования"
Основы художественного конструирования.
До сих пор мы говорили об инженерном конструировании :
Инженер–конструктор обеспечивает взаимодействие узлов и деталей машины, её высокие эксплуатационные характеристики , максимальный КПД минимальную материалоёмкость ( при оптимальной прочности и жёсткости ) и высокий уровень технологичности .
Художественное конструирование ( design ) возникло в среде инженерного конструирования в связи с развитием массового производства изделий , непосредственно предназначенных для использования человеком , а также в связи с общим повышением потребительских требований к качеству промышленных изделий .
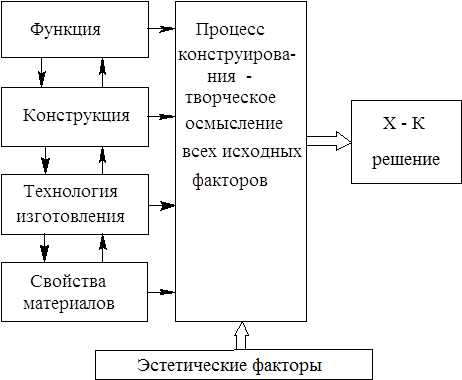
Иначе говоря , промышленные изделия , прошедшие Художественно–конструкторскую разработку должны быть полезными и красивыми .
Поэтому художник–конструктор обеспечивает ,– зрительную целостность формы изделия, – правильное выражение в форме изделия его назначения и способа его эксплуатации , – соответствие (соразмерность ) изделия человеку , – отражение в форме изделия признаков господствующего в настоящий момент стиля в формообразовании изделий данного вида .
Художественное конструирование – комплексная междисциплинарная конструкторско– художественная деятельность , интегрирующая в себе элементы естественно–научных , технических , гуманитарных знаний , инженерного конструирования и художественного мышления .
Центральная проблема Дизайна – создание предметного мира , эстетически оцениваемого как «соразмерный» , «гармоничный» , «целостный» .
Дизайнер создаёт такие продукты и орудия труда , которые сами получают способность «по–человечески относиться к человеку» , т.е. обладают эстетической ценностью .
Конструирование ( проектирование ) промышленного изделия лишь тогда приводит к желаемому результату , когда конструктор , технолог и дизайнер работают в тесном творческом контакте и когда каждый из них хорошо понимает задачу другого и её значение .
Цель изучения Основы Художественного Конструирования – получение минимальных теоретических знаний в области дизайна .
![]()
Мы рассмотрим такие вопросы :
элементы инженерной психологии и эргономики ;
основы композиции и цветоведения ;
элементы промышленной эстетики .
Техническая эстетика – теория дизайна , изучающая особенности художественной деятельности в сфере техники . Эта отрасль общей эстетики обобщает практику массового изготовления орудий труда (станков , машин ) и других предметов , сочетающих в себе утилитарные (практически полезные ) и эстетические качества , т.е. – законы красоты , действующие в промышленном производстве .
* é Эстетика ( общая) – наука об [ национально , классово ,] исторически обусловленной сущности общечеловеческих ценностей , их создании , восприятии , оценки и освоении . Это– философская наука о наиболее общих принципах освоения мира по законам красоты .... º û
º теория искусства .
Инженерная психология – отрасль психологии , изучающая закономерности процессов информационного взаимодействия человека и техники .Данные этой науки используются для проектирования , производства и эксплуатации систем «человек– машина» и систем «человек–машина–среда».
Эргономика ( от греческого ergon – работа и nomos – закон ) – научная дисциплина , комплексно изучающая человека ( группу людей ) в конкретных условиях его (их) трудовой деятельности с использованием технических средств . Цель Эргономики – оптимизация предметного содержания , орудий , условий и процессов труда , повышение привлекательности и удовлетворенности трудом .
Промышленная эстетика ( искусство ) – весь предметный мир , создаваемый человеком средствами промышленной техники по законам красоты и функциональности .
Элементы Промышленной эстетики :
промышленный интерьер ;
промышленная графика ( товарные и фирменные знаки ) ; реклама; тара и упаковка .
Система « Человек – машина » [ «Человек–машина–среда»] .Человек ( человек– оператор ) занимает основное место в управлении созданной им техникой . Технические средства помогают человеку усиливать его возможности с точки зрения физической силы , скорости действия Є производительности труда .
Ведущий принцип организации взаимодействия в системе « Человек–Машина » – ориентация на человека , как субъекта труда и творчества , с целью наиболее полного и рационального использования его интеллектуального и творческого потенциала . Т.О–М.– средство поддержания профессиональной деятельности человека : « Машина – для человека , а– не человек для машины !!! » .
NB ║ Научная и практическая задача организации систем «Человек–Машина–(Среда)» состоит в рациональном распределении и согласовании функций между Человеком и Машиной при сохранении ответственности за Человека !
Эту задачу решает Инженерная психология . При этом Человек–Оператор рассматривается в первую очередь не как звено системы , а именно как живого человека , обладающего такими свойствами , как :
восприятие ;
внимание ;
скорость реакции ;
память , мышление , потребность в общении ;
емкость и долговременность ;
образность и гибкость оперативного мышления и т.д.
В инженерной психологии рассматривают :
сенсорный вход ( органы чувств , или рецепторы человека ) и моторный выход (двигательный или эффекторный аппарат человека) Человека–Оператора ;
процессы переработки информации и задачи управления машинами ( объектом ) ;
нормальные и критические условия жизнедеятельности Человека–Оператора ( физиологический или материальный ) .
é Человек Þ индуктивное мышление
Машина Þ дедуктивные действия û
По этим аспектам мы рассмотрим лишь некоторые рекомендации , которые могут оказаться полезными при конструировании пультов управления , приборных панелей , конструкторско–инженерных устройств и т.п.
При художественном конструировании применяются схемы взаимосвязей :
простая : Человек–Объект
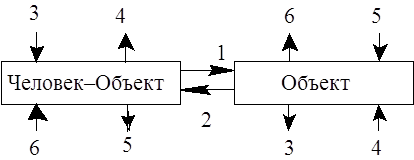

«Треугольник взаимосвязей» : Человек–Система управления–Объект ( среда ) ;
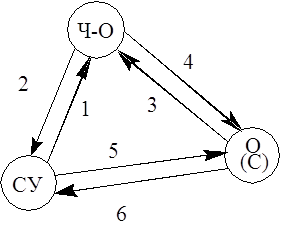
Ч–О : Оператор станка ЧПУ ;
СУ : Блок ЭЧПУ ;
О : Станок .
1 – получение Ч–О от СУ разнообразной выходной информации в виде сигналов от приборов ( отсчётные , световые , звуковые ) .
2 – формирование человеком сигналов управления в виде действий по настройке , регулирования , управления станком .
3 – непосредственное воздействие объекта ( среды ) на Ч–О : расположение элементов блока управления должно соответствовать психофизиологическим возможностям .
4 – воздействие человека на объект (среду) : работа со станком требует не только определённых знаний и навыков ,но и «совместимости» параметров объекта с человеком ( с учётом «помех» ) .
5 – воздействие СУ на объект ( среду ) : система ЧПУ станка может иметь определённые геометрические размеры ( что не всегда позволяет разместить её в станке ) .
6 – воздействие О(С) на СУ : СЧПУ должна нормально работать в условиях вибрации , загрязнённой атмосферы цеха , и других нежелательных воздействий .
Системный подход .
Чтобы упростить сложные процессы анализа работы Человека–Оператора в системах взаимосвязей применяют частотные модели поведения Человека–Оператора .
Чаще всего Человек–Оператор выступает в роли «машины» по приёму и выработке информации .
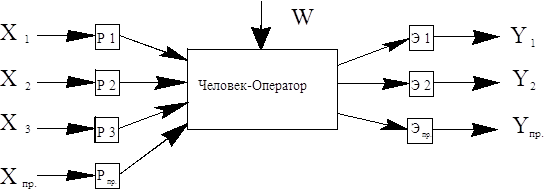
W – воздействие внешней среды .
Y = F ( X , W ) .Основные рецепторы ( органы чувств ) :
Р 1 – зрение ;
Р 2 – слух ;
Р 3 – осязание ;
Рпр. – (тактильные) : обоняние ,вкус ,равновесие (вестибулярный аппарат ) .
Основные эффекторы (формируют сигналы управления ) :
Э 1 – пальцы рук (кисть) (точные , но менее сильные ) ;
Э 2 – ноги ( менее точные , но более сильные ) ;
Эпр. – звуковые команды ( речь ) , биоэлектрические потенциалы, параметры физиологической активности ( t°, потоотделение , частота пульса и др. )
В соответствии с органами чувств на деятельность человека оказывают влияние (W) :
освещённость и цвет среды ;
шум , атмосферное давление ;
характер поверхностей , с которой имеется контакт ;
наличие запахов и токсичных веществ ;
рабочая поза , t°C и влажность ( термолабильность ) .
Для оптимизации связи Человека–Оператора с Оборудованием
необходимо знать :
какое количество информации Человек– Оператор может принять , передать или переработать в единицу времени : «Пропускная» способность и предельные скорости различных реакций ;
какова точность восприятия и выдачи различных сигналов : время «задержки» (обработки) сигналов ;
какова надёжность работы Человека–Оператора : способность противостоять W .
При этом вопросы необходимо решать путём «подгонки» параметров объекта конструирования под способности и возможности человека , а не наоборот .
Т.к. приём и переработка информации – процессы познавательные (ощущение – восприятие – представление ® мышление ) , которые сформировались в течение тысячелетий эволюции человека .
«Прибором» человека , с помощью которого он воспринимает или формирует сигналы , являются анализаторы : Рецептор + Нервные пути – центр в коре больших полушарий .
Рецепторный аппарат тесно связан с эффекторным (двигательным ) аппаратом .
Если рассмотреть Схему прохождения сигнала по контуру управления : Человек–Оператор « Объект , можно выделить 9 характерных стадий ( звеньев ) :
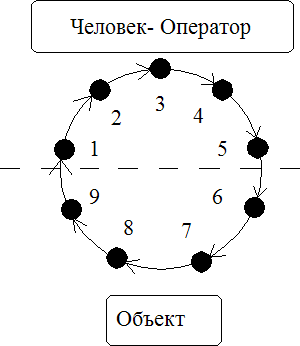
¬ восприятие показаний ( сигналов ) ;
Á преобразование показаний индикатора в форму удобную для сравнения с программой работы ® ;
¯ принятие решения об изменении программы работы ;
° воздействие на органы управления объектом ;
± перемещение рабочих элементов регуляторов ;
² реакция объекта на воздействие ;
Ç работа объекта по новой программе ;
´ отображение нового режима работы на индикаторах .
Основная характеристика этого процесса – скорость обращения сигнала по контуру управления , кроме того ,– погрешностями и надёжностью звеньев ; скоростью обработки информации в них .
Скорость обращения сигналов по контуру управления определяется временем полного цикла регулирования :
Т = Т0 + ТМ ,где Т0 – время задержки сигнала оператором ( стадии 1...5 ) ; ТМ – время задержки сигнала объектом ( стадии 6...9 ) .
! Всегда Т0 >> ТМ . Т0 – определяется следующими компонентами :
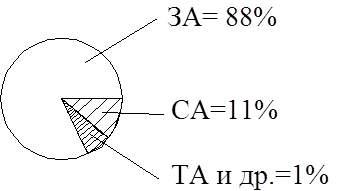
анализаторами и длительностью латентного периода ( время от момента появления сигнала среднего уровня до ответа на него действием ) :
│ ?лп (за) = 0,15 .... 0,22 с
│![]() ?лп (са) = 0,12 .... 0,18 с
?лп (са) = 0,12 .... 0,18 с
│ ?лп (та) = 0,09 .... 0,22 с
│ ?лп (общ) =0,31 ....0,39 с
Кроме того , необходимо учесть количество индикаторов и органов управления.
?з ? 10 секунд.
А также темп работы оператора ( бит с ) :
оптимально 0,5.....5 бит с ( < 0,5 – «засыпает» , > 5 – «перегружен»).
Таким образом скорость обработки сигнала оператором зависит от :
характера информации ( знакомая 30...45 бс ; незнакомая ) ;
конструкции индикатора ( шкала, светофор , звук ) ;
характера считывания информации (команда , осведомление , ситуация ) ;
различимость сигнала (сигнал должен превышать фон в 3....5 раз).
Основные требования к конструкции индикаторов .Индикаторы обеспечивают Человеку–оператору приём сигналов управления .
Основной аппарат приёма – органы чувств , являющиеся частью анализаторов.
При работе с объектами управления Человеке–оператор обычно использует только три вида анализаторов : зрительный (визуальный ) , слуховой (аудиальный) и осязательный (тактильный ) .
Особенности этих анализаторов человека (физиологические ) представляют определённые требования к конструкции индикаторов .
Зрительный анализатор , основной элемент которого – глаз , очень сложная система : 7 млн. колбочек и 130 млн. палочек .
Палочки обеспечивают высокую разрешающую способность при ДО и цветовое зрение.
Колбочки– сумеречное зрение и чёрно–белое зрение .
Различают бино– и монокулярное зрение ( поле зрения ). Самая узкая область различения цвета – зелёная , самая широкая – жёлтая (даже дальтоники) .
Некоторые характеристики глаза нелинейные , если шкала используется на расстоянии до 500 мм от глаз , то пропорционально увеличения шкала на расстоянии 5 м даст в 10 раз большую погрешность .
Среднее время наведения двух глаз в одну точку – около 0,17 секунд , различение площадей двух фигур – до 2 % ; разрешающая способность по углу – 3°.... 12°, по яркости – 2 % .
Эти параметры обеспечиваются при наблюдении в течении > 0,5 с. Время адаптации глаза к изменению освещённости – от 5 до 30.....40 мин.
Визуальные индикаторы могут иметь вид :
светофоров ;
счётчиков ;
шкал и светопланов .
Светофоры – сигнальная лампочка , табло или светящаяся кнопка (клавиша) : наличие или отсутствие сигнала .
Все цвета , кроме синего ! = Различимость .Счётчики – самые точные отчетные устройства . Но их недостаток – они не могут показывать направления и скорость изменения параметра . Темп подачи сигналов , лишняя информация : нули слева .
Шкалы – по форме , подвижности . Основные требования – различимость делений и знаков.
Светопланы – электронно–лучевые трубки , люми– и газоразрядные индикаторы , жидко–кристальные индикаторы (ЖКИ) и светоизлучающие диоды (СИД), выполняемые часто в виде комбинированных дисплеев .
Для облегчения работы рекомендуется использовать мнемосхемы .
Например , проекция на лобовое стекло в летательных аппаратов .
Слуховой анализатор , основной элемент которого – ухо , воспринимает звуковые колебания простые (чистые тона ) и сложные (речь , музыка ) в широком диапазоне частот и уровней сигнала ( 20.....2000 Гц , 0,002 Нм2 ...... 100 Нм2 ) .
Слух обеспечивает стереоэффект (~ 0..... 120 Дб) , биноуральный слух имеет незначительную разрешающую способность по углам , но обеспечивает приём сигналов из любой точки сферы , в центре которой Человек–оператор .
Основные рекомендации по акустическим индикаторам :
tзвучания сигнала ? 0,3.....0,5 с . ;
если используется несколько АС угол между ними должен быть 15....20°(без поворота головы) или 3.....4° (при возможности повернуть голову на источник звука ) ;
учитывать биноуральность слуха и эффекты адаптации ;
наличие шума ( мешающих сигналов ) , модуляцию сигнала .
Тактильный (осязательный) анализатор – даёт возможность на ощупь определять характерные формы органов управления и облегчать или ускорять процесс управления .
Тактильные индикаторы – различимые на ощупь : рукоятки , кнопки , тумблеры .
Для лучшей различимости – размеры должны различаться между собой ? 20 % .
NB : когда органы управления рядом – но результат воздействия разный : цвет и форма !
На основании сказанного рекомендуется (общие рекомендации) :
использовать зрительные анализаторы – для решения задачи само ориентации ; снятия искажений с много шкальных приборов ; сравнения быстро следующих друг за другом сигналов ; наблюдения за источником информации и получения точной количественной информации ; оценки движения . Лучшая различимость – у дискретных сигналов ;
использовать слуховые анализаторы – для обеспечения индивидуальной одноканальной связи ; передачи кратких сообщений ; сигнализации о завершении ряда следующих друг за другом операций; для дублирующих сигналов. Для различимости– один уровень , но разная частота ;
использовать тактильные анализаторы– для тех случаев , когда зрение или слух заняты ; когда требуются подтверждающие сигналы или когда формируются простые команды управления.
Конкретно , смотреть Вудсон У. , и другие « Справочник по инженерной психологии для инженеров и художников–конструкторов . « Москва , «Мир» , 1968 год .
Основные характеристики рабочей среды .Характер физической и нервно–психологической нагрузки делят на четыре категории :
¬ лёгкая (комфортная ) рабочая среда ; средняя ( относительно дискомфортная ) рабочая среда ;
® тяжёлая ( экстремальная ) рабочая среда ;
¯ очень тяжёлая (сверхэкстремальная ) рабочая среда .
смотри сборник стандартов безопасности труда (ССБТ) ® «Техника безопасности и охрана труда»; «Основы безопасности жизнедеятельности» .
Формирование сигналов управления – осуществляется регуляторами с применением эффекторного аппарата Человека–оператора .
Можно сказать , что в этом случае возможно два режима работы : Человек–инструмент (источник сигнала ) и Человек–машина (источник энергии ) .
При выборе или конструировании регуляторов необходимо соблюдать два основных правила :
нельзя пренебрегать двигательными навыками человека. В противном случае затрудняется процесс управления ;
для достижения максимального эффекта управления , усилия , прилагаемые человеком к регуляторам , должны соответствовать характеру действия регулятора .
По конструкции все регуляторы можно разделить на :
нажимные ( кнопки , клавиши , педали ). Для кнопок : чем реже используется и чем меньше прилагаемое тем меньше диаметр поверхности нажатия – вогнутая , для облегчения фиксации пальца .
движковые ( ручельные ) – это устройства управления простыми переключателями , которые ( как и нажимные ) должны иметь два чётко фиксируемых крайних положения ( нежелательное исключение – трёх позиционные ) .
рычажные – головки тумблеров и качающихся рычагов : должны иметь чётко различимый угол отклонения и размеры ( форму ) головки для захвата пальцами или всей рукой .
вращательные – разнообразные ручки управления с плавным или
дискретным движением рабочего элемента .
Рукоятки управления могут быть тактильными индикаторами , что даёт возможность определять характерные формы рукояток и облегчать или ускорять процесс управления.
Замечание . Большое влияние на точность и темп работы Человека– оператора оказывает степень обученности , натренированности и профессиональной пригодности ; необходимость и желание выполнять поставленную задачу .
Для обеспечения универсальности обслуживания объектов операторами с различными параметрами должен соблюдаться принцип максимальной стабильности характеристик объекта.
Поэтому индикаторы и органы управления группируются на панелях Панели управления (прибора) по их функциональному применению .
¬ Наиболее важные и часто используемые индикаторы и органы управления размещают в оптимальной зоне ;
аварийные – в легкодоступных местах вне оптимальной зоне ;
® второстепенные , периодически используемые – вне оптимальной зоны , руководствуясь правилами группировки и взаимосвязи между ними .
Последние правила состоят в следующем :
1. При групповом размещении индикаторов для контрольного считывания :
¬ при наличии в группе шести и более индикаторов – их располагают в виде двух параллельных рядов (вертикальных или горизонтальных ) ;
не делать более пяти – шести разрядов ;
® при наличии 25–30 и более индикаторов комплектовать их в 2–3 зрительно различимые группы . Лицевые поверхности индикаторов следует располагать перпендикулярно к линии взора оператора , находящегося в рабочей позе .
2. При размещении органов управления :
¬ органы управления необходимо располагать в зоне досягаемости (Человек–оператор не должен менять рабочую позу , и не требуется перекрещивать руки (ноги ) или закрывать рукой при включении индикатор ). Важные и часто используемые – в зоне лёгкой досягаемости .
органы управления необходимо располагать в последовательности , соответствующей последовательности действий (например, включения (выключения )) , и группироваться таким образом , чтобы действия оператора осуществлялись слева–направо и сверху– вниз .
3. При правильно размещённых органах управления Человек–оператор, работая , не должен думать о предстоящих манипуляциях управления :
¬ расположение функционально одинаковых органов управления должно быть единообразным во всех группах ;
это расположение должно обеспечивать равномерность нагрузки обеих рук и ног Человека–оператора ;
® поверхности , на которых располагаются Индикаторы и Органы управления не должны быть монотонными , зоны расположения их должны быть хорошо освещены .
В заключении , некоторые общие требования к органам управления :
1. Размеры их должны соответствовать прилагаемым усилиям .
2. Форма и фактура поверхности должна обеспечивать удобный захват .
3. Цветовое оформление должно быть согласовано с общим цветовым решением объекта . Не следует использовать «накладной» цвет , т.е. краски , применяют материалы соответствующего цвета , химические или гальванические покрытия .
4. Форма не должна затруднять удаление загрязнений .
5. Конструкция должна гарантировать безопасность оператора , например , от поражения электрическим током или травм эффекторов.
Лекция 16. Основы конструирования
Эргономическая отработка конструкций – общие положениячасть процесса художественного конструирования .
Эргономика изучает функциональные возможности человека в процессах труда с целью создания совершенных изделий и оптимальных условий труда.
ГОСТ 16456–70 устанавливает четыре группы комплексных эргономических показателей :–
гигиенические ;
антропометрические ;
физио– и психофизио– логические ;
психологические .
По этим показателям оценивается качество продукции в целом и в частности , конструкции .
¬ Гигиенические показатели : уровни освещённости ; вентилируемости ; температуры ; влажности ; запыленности и давления воздуха –микроклимат ;механические и физические факторы : напряжённость магнитного и электрического полей ; радиация ; токсичность ; шум и вибрации ; гравитационные перегрузки и ускорения Ô эти показатели предмет Охраны труда и техники безопасности .
Антропометрические показатели определяются соответствием конструкции объекта размерам и форме тела человека , распределению массы его тела .
Эти показатели проверяют сравнением определяющих размеров тела человека при различных рабочих позах с соответствующими размерами изделия . В ряде случаев необходимо учитывать размеры головы и кисти рук человека .
® Физиологические и психофизиологические показатели определяются соответствием конструкции объекта следующим возможностям человека :
n силовым ;
n скоростным ;
n энергетическим ;
n зрительным ;
n слуховым ;
n осязательным ;
n обонятельным и вкусовым.
Для проверки этих показателей анализируют :
¬ размеры органов управления , их форму и прилагаемые усилия ;
зоны обзора
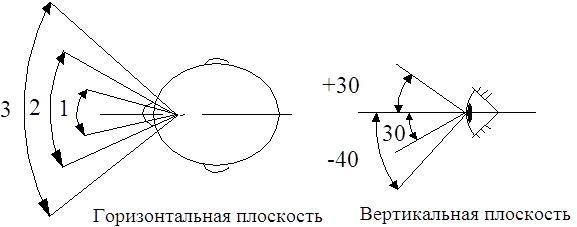
1. 30....40°
2. 50....60°
3. 90°
® рабочие зоны Человека–оператора при управлении ручными и ножными регуляторами ;
¯ анализируют характер движений .
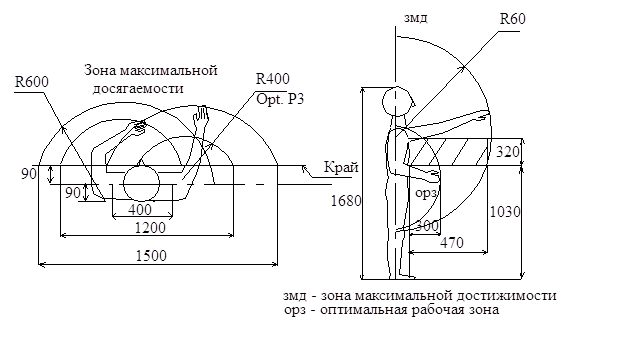 Зона обзора : 30....40° соответствует максимальной – разрешающей способности ;
Зона обзора : 30....40° соответствует максимальной – разрешающей способности ;
50....60° – чёткому цветному , а 90°– черно– белого зрения .
Наиболее удобное расположение индикаторов –по горизонтали 30° ниже линии взора , но не более 30° (вверх) или 40° (вниз) .
При рассмотрении рабочих зон следует иметь в виду , что величина усилия, прилагаемого к Объекту управления , зависит :
n от направления : вверх, вниз , в сторону ;
n высоты расположения : от 300 до 1800 мм ;
n и руки : у большинства людей правая рука сильнее левой в 1,2 раза .
Если Человек–оператор должен часто выполнять переключение , то величины усилий должны быть уменьшены в 2....3 раза .
Во всех случаях усилия больше 150 Н – для рук и более 250Н –для ног при продолжительности нажатия более 3 секунд – УТОМИТЕЛЬНЫ .
¯ Психологические показатели конструкции изделия определяются соответствием закреплённых и вновь формируемых рабочих навыков человека его возможностям по восприятию и переработке информации .
Лекции 17. Основы конструирования
Эргономический анализ и отработка конструкций .
1.0 В основе эргономической отработки конструкции лежит полная совокупность эргономических параметров , что позволяет найти оптимальное художественно–конструкторское решение .
Эргономическая отработка производится на основе эргономического анализа .
Эргономический анализ применяет разнообразные методы исследования , такие как :
n социологические методы (опрос) ;
n визуальные (органометрические) методы ;
n составление циклограмм работы Человека–оператора с применением хронометража и фотохронометража (фотосъёмка , кино– , видео– граммы ) ;
n электрофизиологические методы .
Виды исследований :
n электроэнцефолография (мозг) ;
n электроокулография (движения глазного яблока ) ;
n электромиография (мышцы) ;
n электрокардиография (сердце) ;
n динамометрия и т.д.
1.1 Основные этапы эргономической отработки определяются стадиями разработки :
1) на стадии Технического предложения – предварительный эргономический анализ аналогов и прототипов разрабатываемого объекта ( не только лучших , но и заведомо «плохих» ) , а также детальный анализ конкретных условий функционирования объекта и выявления наиболее важных эргономических показателей ;
2) на стадии Эскизного проектирования – поисковый этап эргономического анализа , на котором рассматривают несколько вариантов конструкции объекта ( художественно–конструкторское решение ) ;
3) на стадии Технического проекта – окончательная художественно–конструкторская компоновка объекта с тщательной эргономической отработкой панелей и пультов управления с индикаторами и регуляторами ;
4) на стадии Рабочего проектирования – авторский надзор за реализацией принятых художественно–конструкторских решений .
При эргономическом анализе учитывают следующие основные группы факторов :
1) насколько учтены антропометрические , психофизиологические , биомеханические и гигиенические данные Человека–оператора ;
2) обеспечивает ли рабочее место Человеку–оператору простую и естественную позу , достаточное рабочее пространство , возможность смены рабочей позы (например, сидя–стоя ) , удобный обзор всех функционально важных узлов и элементов объекта , условий для оперативного обслуживания и профилактики ;
3) создаёт ли цветовое решение объекта положительные эмоции у Человека–оператора и компенсирует ли неблагоприятные воздействия трудового процесса ;
4) является ли информация , поступающая к Человеку–оператору, наглядной и соответствующей сложившимся у него представлениям и стереотипам действий .
Часто при Эргономическом анализе применяют контрольные карты , содержащие перечень вопросов по этим группам факторов , влияющих на трудовой процесс.
NB : Пример дMPC , смотри Варламов Р. Г. , Струнов О. Д. «Элементы Художественного конструирования и Теория Эргономики» М : 1980 год , стр. 39...40 .
При эргономическом анализе необходимо учитывать :
1) климатические условия местности ;
2) микроклимат помещения и его интерьер ;
3) требуемый ритм работы оператора , частоту выполнения и точность рабочих операций ;
4) характеристику основных ( типовых ) поисковых маршрутов оператора , необходимость и возможность смены рабочей позы , взаимодействие с другими операторами .
На основании этого необходимо :
1) провести анализ габаритов объекта ;
2) определить оперативные рабочие зоны и границы рабочего места в целом и установить их соответствие антропометрическим данным ;
3) определить объём и качество оперативной информации , представляемой на панелях объекта , и проанализировать их соответствие психофизиологическим возможностям Человека–оператора ;
4) определить состав органов управления и проанализировать их с точки зрения хиротехники . Хиротехника – отрасль эргономики , которая занимается разработкой наиболее рациональной формы рукояток управления ( или ручного инструмента ) ;
5) проанализировать взаимодействие сенсорных и моторных зон : логику соответствия Органов управления и Индикаторов ;
6) проанализировать соответствие типовых оперативных маршрутов биомеханическим требованиям .
Результаты Эргономического анализа дают возможность обеспечить :
1) равномерное распределение психофизиологических нагрузок на Человека– оператора :
2) естественность , плавность и последовательность рабочих операций.
Похожие работы
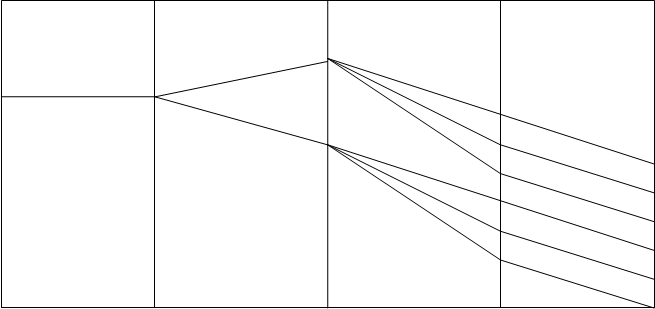
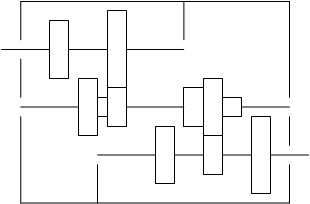
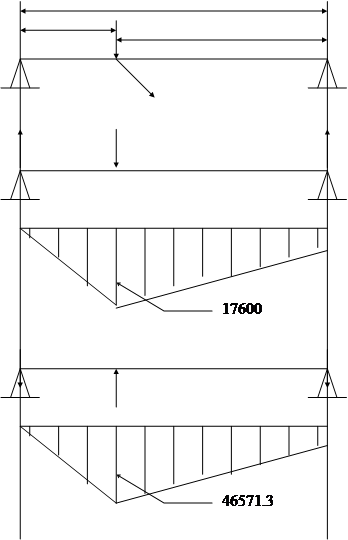
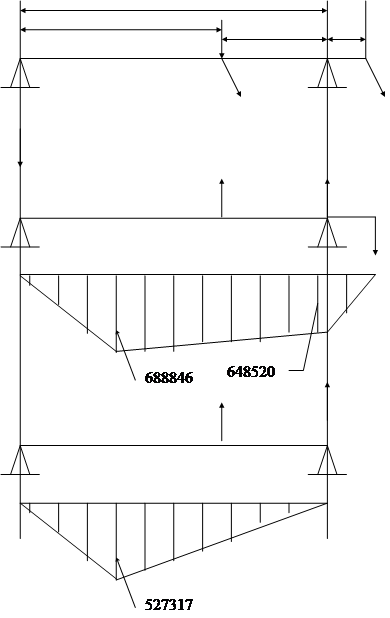
... 195.7 9 2 25.47 392.6 8.49 4 1.3 60.81 164.4 10 2 30.33 329.7 10.11 I - - 76 131.6 I I I 8 1.68 36.09 277.1 12.03 9 1.42 42.96 232.8 14.32 2. Расчет цепной передачи 2.1. Передаточное число передачи u = 3 2.2. Принимаем число зубьев для ведущей звездочки Z1= 25 таб. 11.4 [1] тогда ...
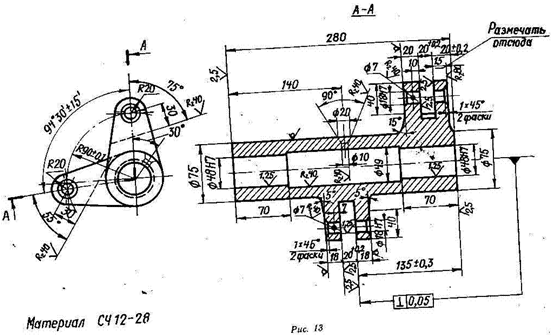
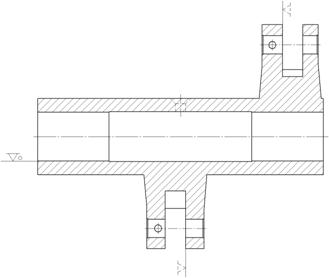
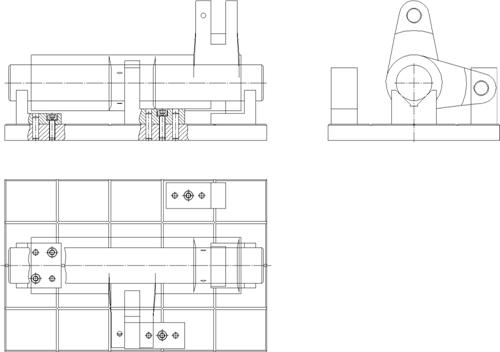
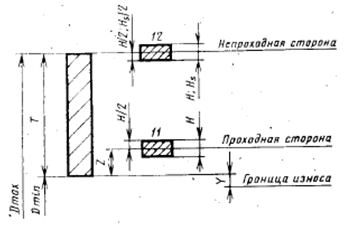
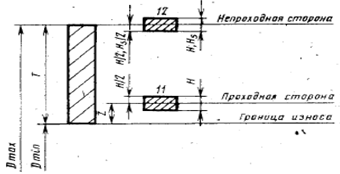
... базирования заготовки. 2. Определение направления действия сил и моментов резания при механической обработке деталей. 3. Определение вида опорных элементов и формы их рабочей поверхности. Для проектирования приспособления требуются следующие исходные данные: - чертеж и технические требования на деталь; - операционный эскиз заготовки, операции или перехода; - справочная литература, ГОСТы, ...


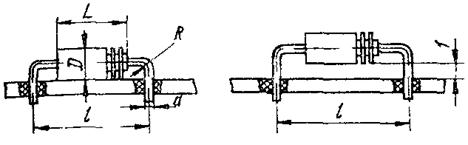
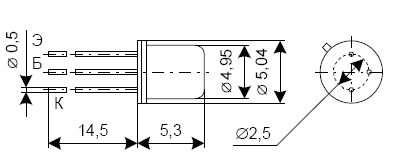
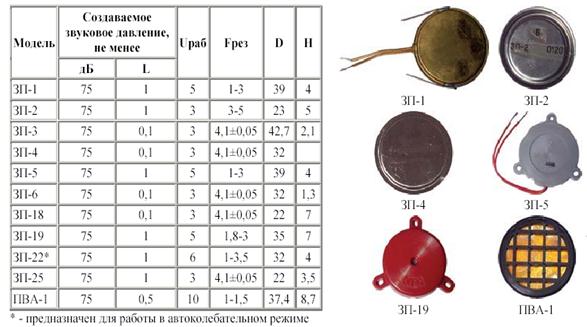
... Звукоизлучатель. Выберем для нашей схемы модель ЗП-2. Рисунок 7. Звукоизлучатель [1] 8.Выключатель. Выберем кнопочный выключатель PBS-10B. Рисунок 8. Выключатель [6] 2.1.2 Выбор технологии изготовления, сборки и монтажа Увеличение плотности печатного монтажа, тенденция к автоматизации технологических процессов изготовления печатных плат, необходимость уменьшения трудоемкости и ...
... системы электронных учебных материалов на основе технологии конструирования ЭУМ в среде MathCAD Происходит формирование умений и навыков конструирования электронных учебных материалов в среде MathCAD на творческом уровне В системе профессиональной подготовки учителей математики, физики, информатики недостаточно отражены подходы к созданию и применению электронных учебных материалов с ...
0 комментариев