Навигация
8.1.2. Программа обработки
************************************************************************
* Эта программа на Neuron C задает Neuron Chip в slave A
* подсчет импульсов поступающих с нейрочипа.
************************************************************************
#pragma enable_io_pullups
////////////////////Параматры для подсчета (определяются пользователем)////////////
#define lower_limit 0 //нижний предел подсчета
#define upper_limit 100 //верхний предел подсчета
#define shaft_direction 1 //направление счета (т.е.,
0=лево,1=право)
/////////////////// Программа //////////////////////
IO_5 input pulsecount analog_input;
IO_5 input quadrature shaft_encoder; //импульсы поступают на 5 вход нейрочипа
signed long count;
signed long increment;
when (io_update_occurs(shaft_encoder){
if (shaft_direction) count += input_value;
else count -= input_value; //вывод полученных данных
/////////////////// Проверка //////////////////////
if (count<lower_limit) count=lower_limit;
if (count>upper_limit) count=upper_limit; //Проверка переполнения overflow
}
when (reset) // Сброс
{
count = 0;
}
************************************************************************
* Эта программа на Neuron C задает Neuron Chip в master A
* принимает информацию со всех нейрочипов типа slave A и в случае превышения порогового уровня в 50 импульсов, что * соответствует ветру 50м/с передает информацию в центральную ЭВМ с указанием номера того датчика с которого поступила * данная информация и времени ее поступления
************************************************************************
#pragma scheduler_reset // процедура сброса
#pragma enable_io_pull-ups // процедура подчета импульсов (описана выше)
#pragma num_addr_table_entries 1
#pragma one_domain
#pragma app_buf_out_priority_count 0
#pragma net_buf_out_priority_count 0
#define timerl 100 // таймер производит опрос по входам на наличие информации каждые 100мкС
#define max_char_from_PC 30 //максимально разрешенное кол-во символов принимаемых нейрочипом
#define porog 50 //установочный порог
{
unsigned int speed; //данные о скорости
unsigned int number; // данные о номере датчика
};
#define max_packet_size 60 // максимально разрешенный пакет отсылаемый в ЭВМ
{
unsigned int speed; //данные о скорости
unsigned int minutes; //время принятия сообщения
unsigned int hours;
unsigned int number // номер датчика
};
/******************************** Дополнительные файлы ************************************/
#include <control.h>
/********************************* Определение I/O ****************************************/
IO_5 output bit RTS;
IO_2 output bit СTS;
IO_4 output serial baud(4800) RXD; // read data from PC
IO_10 output serial baud(4800) TXD; // send data to PC
IO_8 input bit R/W;
IO_5 input bit CS;
IO_9 input bit HS;
/****************************** Сетевые данные *************************************/
network input struct temp_time pctobc_speed_in; // speed
network input struct temp_time pctobc_number_in; // number
network input struct time NV_time_in; // BC time
network input boolean NVfan_state_in // TRUE: fan is flashing
network input boolean NVcomp_state_in; // TRUE: compressor is on
network output struct temp_time bind_info(unackd) NV_timesetpt_out;
//************************************ Глобальные ***************************************/
char input_but[max_packet_size]; // пакет отсылаемый в ЭВМ
char input_buf1[max_char_from_PC]; // Input from PC (1st time)
char input_buf2[max_char_from_PC]; // Input from PC (2nd time)
char * buf_ptr; // указатель в буфере
boolean packet_found = FALSE; // пакет не найден.
boolean compress_state = FALSE; // датчик не исправен
int last_num_chars; // количество принятых символов
int speed;
char out_char[1];
struct bcd digits; // holds BCD data to be sent to PC
// digits.d1 most significant nibble in ms byte
// digits.d2 least significant nibble in ms byte
// digits.d3 most significant nibble
// digits.d4 least significant nibble
// digits.d5 most significant nibble in ls byte
// digits.d6 least significant nibble in ls byte
struct { // data from bc
unsigned int speed;
unsigned int number;
} bc_data;
struct speed_time bc_number;
/************************************ Timers ******************************************/
mtimer repeating check_CTS;
mtimer repeating get_data_from_bc; // every 100 ms poll bc
// then send to PC
/*********************************** Functions ****************************************/
boolean append_packet( )
description: assert CTS, append data to input_buf[ ] if any
and return append_packet = TRUE if 1st char. = ‘D’
and last char. is a CR.
{
boolean packet;
int i;
int num_chars1;
int num_chars2;
packet = FALSE;
num_chars1 = 0;
num_chars2 = 0;
io_out( CTS, 0 ); // enable cts
num_chars1 = io_in( RXD, input_buf1, max_char_from_PC );
io_out( CTS, 1 ); // disable cts
when (io_puls_up io_5 > porog )
{
num_chars2 = io_in( RXD, input_buf2, max_char_from_PC );
// append data over to where final packet goes
if ( num_chars1 != 0 )
{ // if data append it to input_buf
for ( i = last_num_chars; i < last_num_chars + num_chars1; i++ )
{
input_buf[i] = input_buf1[ i - last_num_chars ]; // append
}
last_num_chars = last_num_chars + num_chars1;
}
if ( num_chars2 != 0 )
{ // if data append it to input_buf
for ( i = last_num_chars; i < last_num_chars + num_chars2; i++ )
{
input_buf[i] = input_buf2[ i - last_num_chars ]; // append
}
last_num_chars = last_num_chars + num_chars2;
}
if ( last_num_chars > 0 ) { // something there
if ( input_buf[0] != ‘D’ )
{ // A packet is started and packet is invalid
last_num_chars = 0; // reset count of total characters read
packet = FALSE;
}
else if ( input_buf[ last_num_chars - 1 ] == ‘/r’ ) {
// 1st char. a ‘D’ and last char. a carriage return
packet = TRUE;
}
} // something there
return( packet );
}
// This function converts a hex character to 2 ASCII characters
// and sends the characters to out the TXC port to the PC
//
void putch_hex(unsigned int hex_char)
{
out_char[0] = ( hex_char >> 4 ) & 0x0f; // keep lower nibble
if( out_char > 9 )
out_char[0] += 0x37;
else
out_char[0] += 0x30;
io_out( TXD, out_char, 1 ); // output 1 char. out the 232 port to the PC
out_char[0] = hex_char & 0x0f;
if(out_char > 9)
out_char[0] += 0x37;
else
out_char[0] += 0x30;
io_out( TXD, out_char, 1 ); // output 1 char. out the 232 port to the PC
}
//
// This function converts two ascii characters to a decimal digit
//
unsigned char to_dec(unsigned char msb,unsigned char lsb)
{
return( (msb - 48) * 10 + (lsb - 48) );
}
/************************************* Reset *****************************************
when (reset) {
bc_data.hours = 0;
bc_data.minutes = 0;
bc_data.speed = 0;
bc_data.number = 0;
check_CTS = timer1; // repeating timer when to assert CTS
// to check for PC data
get_data_from_bc = 100; // every 100 ms poll bc and then send to PC
when (io_puls_up io_5 >50 )
{
when ( timer_expires(check_CTS) { // go get next character(s)
packet_found = append_packet( ); // append more data if any
// to input_buf[].
// also returns true if
// when finds what looks like a good packet.
check_CTS = timer1;
}
when ( packet_found ) { // process packet
// packet format: <D><command><data>
switch( input_buf[1] ) { // select from type of packet byte
case ‘1’:// set time <D><1><xxxx><CR>
if ( last_num_chars == 7 ) {
NV_timesetpt_out.temp = 255; // code for do not use
// convert ASCII HHMM in input_buf[2-5] to unsigned int.
bc_data.hours = NV_timesetpt_out.hours =
to_dec(input_buf[2], input_buf[3]);
bc_data.minutes = NV_timesetpt_out.minutes =
to_dec(input_buf[4], input_buf[5]);
}
break;
case ‘2’: // set number <D><2><xx><CR>
if ( last_num_chars == 5 ) {
// convert ASCII set point in input_buf[2-3] to unsigned int.
bc_data.number = NV_timesetpt_out.speed =
to_dec(input_buf[2], input_buf[3]);
NV_timesetpt_out.hours = 255; // code for do not use
NV_timesetpt_out.minutes = 255; // code for do not use
}
break;
default: // bad packet
break;
}
packet_found = FALSE; // finished last packet
last_num_chars = 0; // reset # of bytes collected in packet
for ( temp = 0; temp < max_packet_size; temp++ ) { // not needed but helps in d
input_buf[temp] = 0;
}
}
when ( nv_update_fails ) {
}
when ( nv_update_occurs(NV_time_in) ) { // BC to PC time (HHMM)
bc_data.hours = NV_time_in.hours; // HH time
bc_data.minutes = NV_time_in.minutes; // MM time
}
when ( nv_update_occurs(pctobc_temp_in) ) { // BC to PC speed
bc_data.speed = pctobc_temp_in.temp; // BC speed
}
when ( nv_update_occurs(pctobc_setpt_in) ) { // BC to PC number
bc_data.setpoint = pctobc_setpt_in.temp; // BC number
}
when ( nv_update_occurs(NVcomp_state_in) ) {
if (NVcomp_state_in == TRUE) {
compress_state = TRUE;
}
else {
compress_state = FALSE;
}
}
when ( nv_update_occurs(NVfan_state_in) ) {
if (NVfan_state_in == TRUE;
fan_state = TRUE;
}
else {
fan_state = FALSE;
}
}
when ( nv_update_fails(NVcomp_state_in) ) { // datchik not responding
compress_state = FALSE; // assume off
}
when( timer_expires(get_data_from_bc) ) {
// every 100 ms send data to PC and poll fan and compressor for status
poll(NVcomp_state_in); // compressor state
get_data_from_bc = 100; // 100 ms repetitive timer
// packet consists of: <start><time><temperature><setpt><compressor><fan><CR>
out_char[0] = ‘B’; // Beginning of packet character
io_out(TXD, out_char, 1); // send out 232 port
// output time (hours only)
bin2bcd( (long) bc_data.hours, &digits);
out_char[0] = digits.d5 + 0x30; // high time BCD digit converted to ASCII
io_out( TXD, out_char, 1);
out_char[0] = digits.d6 + 0x30; // low time BCD digit converted to ASCII
io_out( TXD, out_char, 1);
// output time (minutes only)
bin2bcd( (long) bc_data.minutes, &digits);
out_char[0] = digits.d5 + 0x30; // high time BDC digit converted to ASCII
io_out( TXD, out_char, 1);
out_char[0] = digits.d6 + 0x30; // low time BCD digit converted to ASCII
io_out( TXD, out_char, 1);
// output time (speed)
bin2bcd( (long) bc_data.speed, &digits);
out_char[0] = digits.d5 + 0x30; // high speed. BCD digit converted to ASCII
io_out( TXD, out_char, 1);
out_char[0] = digits.d5 + 0x30; // low speed. BCD digit converted to ASCII
io_out( TXD, out_char, 1);
// output time (number)
bin2bcd( (long) bc_data.number, &digits);
out_char[0] = digits.d5 + 0x30; // high stpt BCD digit converted to ASCII
io_out( TXD, out_char, 1);
out_char[0] = digits.d6 + 0x30; // low stpt BCD digit converted to ASCII
io_out( TXD, out_char, 1);
// output datchik on/off
if ( compress_state == TRUE ) { // datchik is on
// (i.e. LEDs scrolling)
io_out(TXD, “1”, 1); // output to PC datchik is on
}
else {// datchik is off (i.e. LEDs not flashing)
io_out(TXD, “0”, 1); // output to PC datchik is off
}
// a <CR> ends the packet
io_out(TXD, “\r”, 1); // <CR>
}
Министерство общего и специального образования РФ
Московский Энергетический Институт
(Технический Университет)
Филиал в городе Смоленске
Кафедра вычислительной техники
Техническое задание
к курсовой работе по дисциплине
"Сети ЭВМ и средства коммуникации"
на тему
“Сеть на основе нейрочипа”
| гр. ВМ1-97 студент: Вальков К.Г. преподаватели: Аверченков О.Е. |
г. Смоленск 2000 г.
1. Область применения.
Данное устройство и программное обеспечение может и использоваться на аэродромах большой площади с разветвленной сетью датчиков для определения скорости ветра в различных направлениях и областях взлетной полосы. И дальнейшей передачи на центральную ЭВМ.
2. Цель и назначение
Освоить принципы построения сетей с использованием нейрочипов. Изучить структуру и программный язык NEURON C. Определить применима ли данная сеть для различных аэродромов (малой, средней и большой протяженности). Разработать электрическую схему устройства коммуникации датчик - центральная ЭВМ с внутренним устройством обработки.
3. Технические требования.
Требования к аппаратуре: для полноценной работы данного устройства необходимо напряжение питание +(5-12)В. Среда передачи данных : интерфейс RS232C (25 контактный разъем). Отклонение от приведенных в спецификации характеристик элементов ±2%.
Требования к надежности: устройство должно работать в любом положении (вертикальное, горизонтальное ), в любых погодных условиях полноценно выполнять свою задачу и обрабатывать внештатные ситуации, возникающие при работе, связанные с недостаточной квалификацией оператора.
4.Задание
Разработать устройство и программное обеспечение к нему выполняющему следующую функцию : обработка информации поступающей с аэродинамических датчиков (датчики анализа скорости ветра) и передача поступающей информации по сети в ЭВМ, сеть реализовать на основе нейрочипа
11. Оглавление
Аннотация.__________________________________________________________ 2
1. Введение.__________________________________________________________3
1.1. Причины и последствия объединения компьютеров в сеть. ______________3
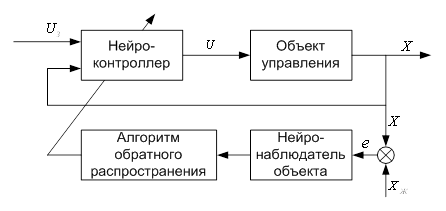
1.2. Управление техническими процессами ______________________________4
1.2.1. Классический подход _________________________________________ 4
1.2.2. Децентрализованный подход ___________________________________5
1.3. Информационный обмен как основа распределенных систем ___________7
1.3.1. Иерархия систем _____________________________________________7
1.3.2. Семиуровневая модель ISO/OSI ________________________________8
1.4. Топологии _____________________________________________________11
1.5. Инструментарий ________________________________________________15
1.5.1. Основные характеристики микроконтроллеров NEURON Chip _____17
2. Постановка задачи ._______________________________________________ 24
2.1. Обзор литературы и предлагаемых методов решения.________________ 24
2.2. Анализ задачи. ________________________________________________ 25
2.3. Описание алгоритма____________________________________________27
3. Разработка программы_____________________________________________28
3.1. Структура программы с описанием._______________________________28
3.2. Структура модулей._____________________________________________29
3.3.Описание интерфейса.___________________________________________30
3.4.1. Человеко-машинный интерфейс ______________________________30
3.4.2. Обработка ошибок _________________________________________30
4. Результативная часть.______________________________________________31
4.1. Тестирование.___________________________________________________31
4.1.1. Выбор методики тестирования ______________________________31
4.1.2. Описание методики _______________________________________32
4.1.3. Результаты ______________________________________________32
4.2. Ограничения на программу.______________________________________33
4.3. Инструкция пользователю _______________________________________33
Заключение._______________________________________________________34Список литературы._________________________________________________36
Приложения._______________________________________________________37
1. Документированный текст программы.______________________________38
2.Техническое задание . ____________________________________________ 43
3. Схема принципиальная -электрическая._____________________________П1
Оглавление.________________________________________________________46
Похожие работы
... и необходимостью специальной подготовки потенциальных пользователей для оптимальной организации адаптивного процесса. В то же время широкое распространение могут получить обученные аналоговые нейрокомпьютеры (нейросети) с фиксированной или незначительно подстраиваемой структурой связей – нейропроцессоры. Задача создания нейропроцессоров сводится к обучению цифровой нейросетевой модели нужному ...
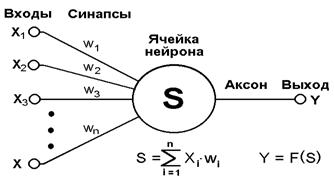
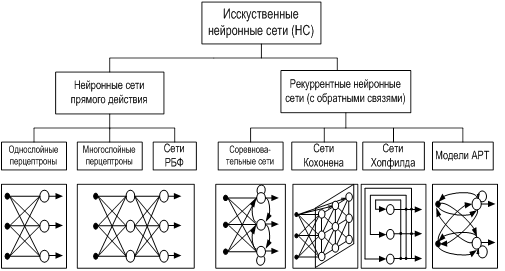
... и число нейронов в каждом слое может быть произвольным, однако фактически оно ограничено ресурсами компьютера или специализированной микросхемы, на которых обычно реализуется нейросеть. Чем сложнее нейронная сеть, тем масштабнее задачи, подвластные ей. Выбор структуры нейросети осуществляется в соответствии с особенностями и сложностью задачи. Для решения некоторых отдельных типов задач уже ...
... в связи с необходимостью упорядоченного сообщения с высоким приоритетом при радикальном изменении окружающих условий и двунаправленностью каналов. Возможности вычисления путей маршрутизации можно применять при построении интегральных схем и проектирования кристаллов процессоров. Нейрокомпьютеры с успехом применяются при обработке сейсмических сигналов в военных целях для определения коорди
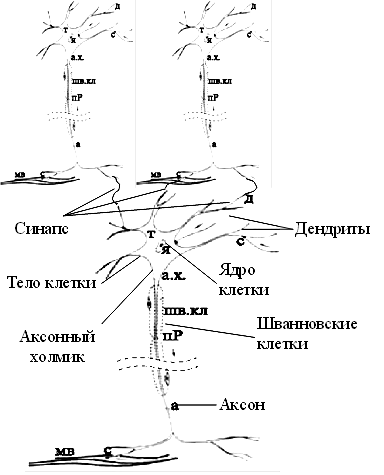
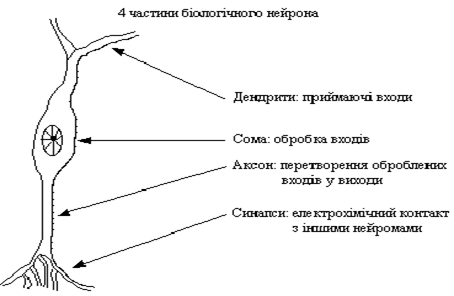
... информацию, находить в ней закономерности, производить прогнозирование и т.д. В этой области приложений самым лучшим образом зарекомендовали себя так называемые нейронные сети – самообучающиеся системы, имитирующие деятельность человеческого мозга. Область науки, занимающаяся построением и исследованием нейронных сетей, находится на стыке нейробиологии, математики, электроники и программирования ...
0 комментариев