Навигация
Формирование векторного представления контура
9544
знака
1
таблица
2
изображения
3. Формирование векторного представления контура
После выполнения алгоритма прослеживания контура и выявления контрольных точек имеется три вектора:![]() ,
, ![]() ,
,
![]() - абсциссы, ординаты и веса контрольных точек соответственно. Тройку
- абсциссы, ординаты и веса контрольных точек соответственно. Тройку ![]() назовем скелетом изображения
назовем скелетом изображения ![]() . Далее вычислим:
. Далее вычислим:
центр масс контрольных точек ![]() , где
, где ![]() ,
, ![]() ;
;
длины радиус-векторов контрольных точек относительно центра масс: ![]() ,
, ![]() ,
а также длины нормированных радиус-векторов
,
а также длины нормированных радиус-векторов ![]() , где
, где ![]() ;
;
косинусы углов между соседними радиус-векторами контрольных точек: ![]() ,
, ![]() ( считая
( считая ![]() ,
, ![]() )
)
Из вычисленных компонент составляем векторы ![]()
![]() . Векторы
. Векторы ![]() будут инвариантны относительно сдвига, поворота и гомотетии изображения относительно центра масс (если «замкнуть» эти векторы, считая
будут инвариантны относительно сдвига, поворота и гомотетии изображения относительно центра масс (если «замкнуть» эти векторы, считая ![]() ). Четверку
). Четверку ![]() будем называть нормированным векторным представлением изображения
будем называть нормированным векторным представлением изображения ![]() . Рассмотрим вопрос об устойчивости центра масс изображения к добавлению новой контрольной точки.
. Рассмотрим вопрос об устойчивости центра масс изображения к добавлению новой контрольной точки.
Теорема 1. Если к нормированному векторному представлению ![]() добавить контрольную точку
добавить контрольную точку ![]() с весом
с весом ![]() , то для евклидова расстояния между новым центром тяжести
, то для евклидова расстояния между новым центром тяжести ![]() и старым
и старым ![]() справедлива оценка
справедлива оценка ![]() , где
, где ![]() - точки скелета изображения
- точки скелета изображения ![]() . В частности, если
. В частности, если ![]() , то
, то ![]() .
.
Другими словами, если число контрольных точек достаточно велико, а вес новой точки небольшой, то центр симметрии сместится незначительно.
4.Функция изображения
Вместо анализа векторного представления ![]() в ряде задач (одна из которых будет рассмотрена в следующем разделе) удобней изучать свойства некоторой функции, связывающей векторы из представления
в ряде задач (одна из которых будет рассмотрена в следующем разделе) удобней изучать свойства некоторой функции, связывающей векторы из представления ![]() . Например, рассмотрим функцию
. Например, рассмотрим функцию ![]()
![]()
![]() ,
,
где ![]() (
(![]() ). Эту функцию можно рассматривать как обобщение дескриптора Фурье [5]. По функции
). Эту функцию можно рассматривать как обобщение дескриптора Фурье [5]. По функции ![]() коэффициенты
коэффициенты ![]() (а, следовательно, и
(а, следовательно, и ![]() ) будут определяться однозначно, как коэффициенты частичной суммы ряда Фурье. По дискретным значениям этой функции
) будут определяться однозначно, как коэффициенты частичной суммы ряда Фурье. По дискретным значениям этой функции ![]()
![]() , коэффициенты
, коэффициенты ![]() можно найти из линейной системы
можно найти из линейной системы ![]() ,
,![]() , если значения
, если значения ![]() ,
, ![]() , такие, что определитель матрицы
, такие, что определитель матрицы ![]() отличен от нуля, где
отличен от нуля, где  , где
, где ![]() - целая часть числа. Множество функций изображения будем рассматривать вместе с нормой
- целая часть числа. Множество функций изображения будем рассматривать вместе с нормой ![]() . Следующая теорема говорит об устойчивости функции изображения к изменению весов (и, следовательно, к изменению центра масс).
. Следующая теорема говорит об устойчивости функции изображения к изменению весов (и, следовательно, к изменению центра масс).
Теорема 2. Пусть ![]() и
и ![]() два скелета изображения
два скелета изображения ![]() такие, что
такие, что ![]() . Тогда, если
. Тогда, если ![]() и
и ![]() соответствующие этим скелетам функции изображения, то
соответствующие этим скелетам функции изображения, то ![]() , где
, где  .
.
Однако при добавлении новой контрольной точки даже с небольшим весом функция изображения, вообще говоря, может сильно измениться, так как она не является инвариантной относительно сдвига векторов векторного представления ![]() . Таким свойством будет обладать, например, функция
. Таким свойством будет обладать, например, функция ![]() , хотя коэффициенты этой функции уже не будут однозначно восстанавливаться по ее значениям.
, хотя коэффициенты этой функции уже не будут однозначно восстанавливаться по ее значениям.
5.Распознавание симметрий
Изображение ![]() называется
называется ![]() -осесимметричным [6], если оно переводится само в себя после поворота на любой угол, кратный
-осесимметричным [6], если оно переводится само в себя после поворота на любой угол, кратный ![]() вокруг своего центра масс. Симметрия является важной в задачах распознавания характеристикой изображаемого объекта. Подробный обзор существующих методов обнаружения симметрий и определения ориентации объекта, в том числе и с помощью дескрипторов Фурье, можно найти в работе [6]. Распознавать симметрию можно непосредственно анализируя векторное представления
вокруг своего центра масс. Симметрия является важной в задачах распознавания характеристикой изображаемого объекта. Подробный обзор существующих методов обнаружения симметрий и определения ориентации объекта, в том числе и с помощью дескрипторов Фурье, можно найти в работе [6]. Распознавать симметрию можно непосредственно анализируя векторное представления ![]() , если оно достаточно точно отражает характер симметрии (не содержит «лишних» контрольных точек). Векторное представление
, если оно достаточно точно отражает характер симметрии (не содержит «лишних» контрольных точек). Векторное представление ![]() назовем
назовем ![]() -осесимметричным, если построенный по этому векторному представлению многоугольник будет
-осесимметричным, если построенный по этому векторному представлению многоугольник будет ![]() -осесимметричным. С другой стороны, для распознавания симметрии можно использовать и функцию изображения
-осесимметричным. С другой стороны, для распознавания симметрии можно использовать и функцию изображения ![]() . В этом случае лучше перейти к комплексной форме записи функции изображения. Обозначим через
. В этом случае лучше перейти к комплексной форме записи функции изображения. Обозначим через ![]() , где
, где ![]() . Тогда
. Тогда ![]() и справедлива
и справедлива
Теорема 3. ![]() является
является ![]() -осесимметричным векторным представлением изображения
-осесимметричным векторным представлением изображения ![]() тогда и только тогда, когда найдется такое
тогда и только тогда, когда найдется такое ![]() , что
, что ![]() ,
, ![]() где
где .
.
Это мультипликативное свойство функции изображения можно использовать для распознавания симметрий, а именно, если для заданного малого ![]() найдутся такие
найдутся такие ![]() и
и ![]() , что
, что ![]() , то можно считать векторное представление
, то можно считать векторное представление ![]()
![]() -осесимметричным.
-осесимметричным.
Список литературы
Hecker Y.C., Bolle R.M. On geometric hashing and the generalized Hough transform, IEEE Trans. Syst., Man and Cybern. 24, N9, 1994, p.1328-1338.
Dufresne T.E., Dhawan A.P., Chord-tangent transformation for object recognition, Pattern Recogn. 28, N9, 1995, p.1321-1332.
Bolles R., Cain R.A., Recognizing and locating partiavisible objects: The local-feature-focus method, Robot Vision A.Publ. Ed., 1984.
Liu H.C., Srinath M.D., Partial Shape Classification Using Contour Matching in Distance Transformer; IEEE Trans. Pattern Anal. and Mach. Intell, 12, N11, p.1072-1079.
Zahn C.T., Roskies R.S., Fourier descriptors for plane closed curves, IEEE Trans. Comput. C-21, March, 1972, p.269-281.
Pei S.C., Liov L.G., Automatic symmetry determination and normalization for rotationally symmetric 2D shapes and 3D solid objects, Pattern Recogn, 27, N9, 1994, p.1193-1208. последовательностей".- Таганрог, изд. ТРТУ, 1996 г.
Похожие работы
... для графа на рис. 3, приняв, что дерево образовано ветвями 2, 1 и 5 Ответ: B= Решить задачу 5, используя соотношения (8) и (9). Теория / ТОЭ / Лекция N 3. Представление синусоидальных величин с помощью векторов и комплексных чисел. Переменный ток долгое время не находил практического ...
... . Для одного пользователя, используется для ведения настольной БД или как клиент для подключения к серверу БД. Оценка современных СУБД на соответствие требованиям, предъявляемым к автоматизированным информационным системам кадастра. Рассмотрим стандартные современные реляционные СУБД по каждому классу продуктов, основные возможности, которые они предоставляют. Произведем оценку их, в соответствии ...
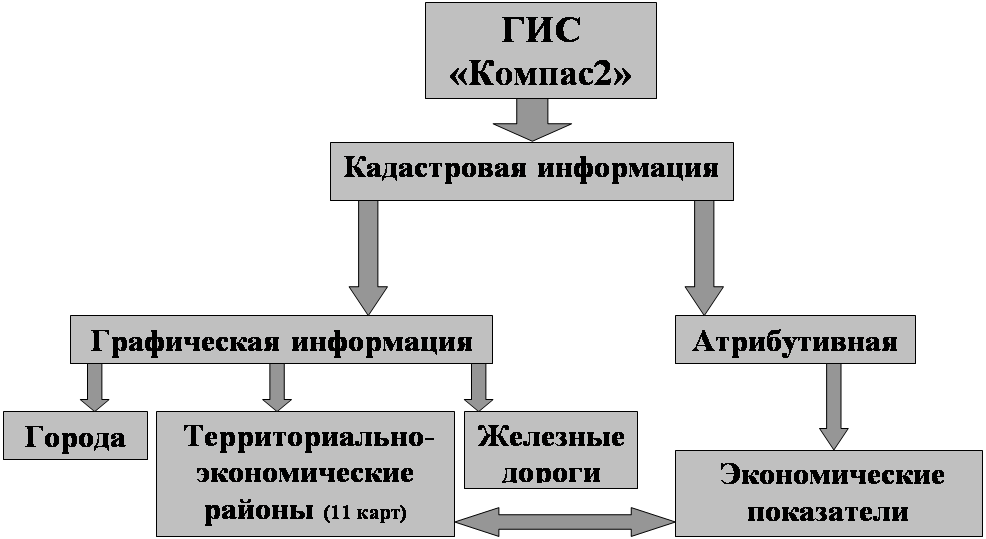
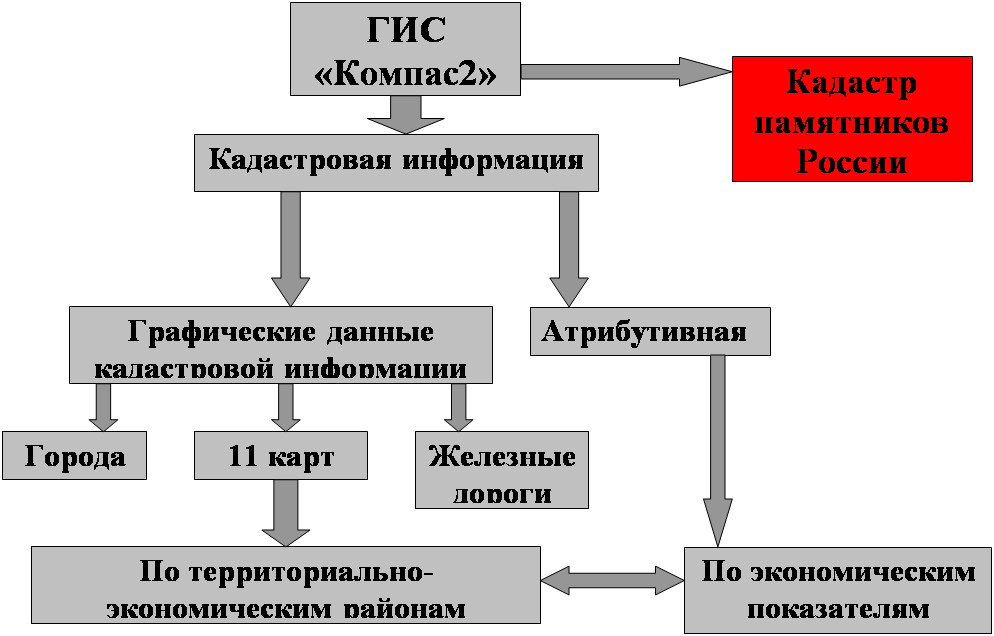
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
... стриммера емкости 1.5 Гбайт, и на лазерный диск при помощи соответствующего устройства. В целом, программное и техническое обеспечение Яррайкомзема является достаточным для автоматизированной обработки землеустроительной информации и позволяет решать большинство возникающих в процессе деятельности задач оперативно, с высокой долей качества и профессионализма. Глава 2. Обработка результатов ...
0 комментариев