Обоснование
разработки
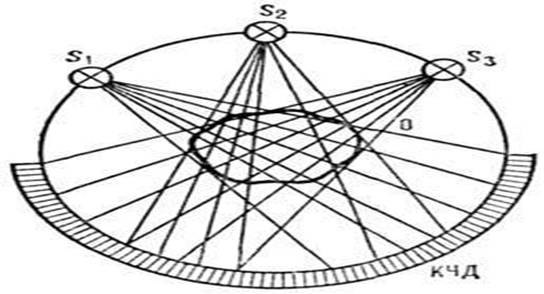
Рентгеновское
изображение
преобразуется
в световое
входным люминесцентным
экраном, размещенным
в вакуумной
колбе;
Анализ
технического
задания и разработка
структурной
схемы
Особенности
параллельного
порта
Программирование
параллельного
порта
Выбор
аналого-цифрового
преобразователя
Навигация
Выбор аналого-цифрового преобразователя
Компьютерная Томография
72750
знаков
14
таблиц
0
изображений
4.1 Выбор аналого-цифрового преобразователя.
Для преобразования аналогового сигнала от датчика положения гантрии в цифровую форму, для дальнейшей обработки с помощью ЭВМ необходимо использование АЦП.
В АЦП входным сигналом является напряжение, а выходным - соответствующий этому напряжению цифровой код, который образуется в результате квантования входного напряжения по уровням. Принцип работы АЦП зависит от метода преобразования. По алгоритму преобразования основные методы преобразования, используемые в микросхемах АЦП, подразделяются на методы: последовательного счета, поразрядного уравновешивания (последовательного счета) и параллельного действия (считывания). [5]
Критерием выбора АЦП являются его параметры: число разрядов, быстродействие, точность, стоимость.
Число разрядов выходного кода определяет количество возможных уровней квантования входного сигнала. Для n-разрядного двоичного кода это количество равно 2n.
Разрешающая способность определяется минимальным входным напряжением, соответствующим изменению выходного кода на единицу младшего разряда. Она характеризует порог чувствительности при котором происходит смена выходного кода.
Нелинейность (рис. 4.1) показывает максимальное отклонение реальной передаточной характеристики от идеальной; выражается в процентах или долях младшего разряда (МР).
Рис. 4.1 Нелинейность и абсолютная нелинейность преобразования.
Дифференциальная нелинейность - это отклонение двух входных сигналов, соответствующих соседним выходным кодам от значения МР. Выражается дифференциальная нелинейность также в процентах или долях МР.
Абсолютная погрешность преобразования в конечной точке шкалы - это отклонение напряжения от номинального значения, соответствующего конечной точке характеристики преобразования. Эта погрешность зависит от шага квантования (методическая погрешность) и инструментальных погрешностей, вносимых узлами АЦП.
Наиболее быстродействующими являются АЦП параллельного действия, однако они также самые сложные и самые дорогие. АЦП последовательного счета имеют самое низкое быстродействие. Широко распространенные АЦП последовательного приближения обладают средним быстродействием.
Исходя из специфики задачи, для ее выполнения подойдут функционально завершенные АЦП, пригодные для непосредственного сопряжения с ЭВМ. Такие АЦП требуют минимального количества вспомогательных элементов, имеют встроенные источники опорного напряжения, генераторы тактовых импульсов буферные регистры с тремя состояниями. Важным требованием является работа АЦП с ТТЛ уровнями для непосредственного подсоединения к параллельному порту ЭВМ.
Определим требуемую разрядность АЦП. Для обеспечения точности менее одного градуса число разрядов n должно быть:
n > log360
Т.е. n должно быть больше или равно 9.
Указанным требованиям удовлетворяет 10 - разрядный функционально полный АЦП последовательного приближения К1113ПВ1, выполненный по КМДП - технологии.
Функциональная электрическая схема АЦП К1113ПВ1 показана на рис. 4.2.
16
11
9 (СР)
13
14
1
18 (МР)
17
15
10
12
Рис.4.2 Функциональная электрическая схема АЦП К1113ПВ1.
Микросхема К1113ПВ1 выполняет функцию 10-разрядного аналого-цифрового преобразования однополярного или биполярного входного сигнала с представлением результатов преобразования в параллельном двоичном коде. Она содержит все функциональные узлы АЦП последовательного приближения, включая КН, ЦАП, РПП, ИОН, ГТИ, выходной буферный регистр с тремя состояниями, схемы управления. [6]
Для ее эксплуатации необходимы только два источника питания и регулировочные резисторы. Выходные каскады с тремя состояниями позволяют считывать результат преобразования непосредственно на шину данных МП. Несколько АЦП могут обслуживать один МП, и наоборот. По уровням входных и выходных логических сигналов АЦП сопрягается с цифровыми ТТЛ ИС. Классификация БИС по группам А, Б, В проводится по значениям параметров нелинейности и дифференциальной нелинейности.
Микросхемы К1113ПВ1 изготавливаются по биполярной технологии, модифицированной для совмещенного формирования на кристалле биполярных транзисторов, а также элементов инжекционной логики и тонкопленочных прецизионных резисторов. Технология позволяет разместить в одной БИС большое число цифровых элементов и выполнить аналоговые узлы с высоким уровнем параметров. В процессе производства осуществляется настройка АЦП до требуемых значений электрических параметров путем подгонки сопротивлений тонкопленочных резисторов лазерным лучом.
Микросхемы К1113ПВ1 выпускаются в 18-выводном герметичном металлокерамическом корпусе типа 238.18-1 с вертикальным расположением выводов.
Нумерация и расположение выводов микросхемы:
1-9 - цифровые выходы 9-1;
10 - напряжение источника питания (+5 В);
11 - гашение и преобразование;
12 - напряжение источника питания (-15 В);
13 - аналоговый вход;
14 - общий (аналоговая земля);
15 - управление сдвигом нуля;
16 - общий (цифровая земля);
17 - готовность данных;
18 - цифровой выход 10 (младший разряд);
Основные электрические параметры микросхемы К1113ПВ1А представлены в табл. 4.1.
Табл. 4.1
Основные электрические параметры АЦП К1113ПВ1
| Параметр | Не менее | Не более |
| Число разрядов n | 10 | - |
| Нелинейность , % | - 0,1 | 0,1 |
| Дифференциальная нелинейность , % | - 0,1 | 0,1 |
| Абсолютная погрешность преобразования в конечной точке шкалы | - 20 | 20 |
| Напряжение смещения нуля на входе, мВ | - 30 | 30 |
| Время преобразования t, мкс | - | 30 |
| Напряжение питания U1, В | 4,5 | 5,5 |
| Напряжение питания U2, В | -16,5 | -13,5 |
| Ток потребления I1 | - | 10 |
| Ток потребления I2 | - | 20 |
| Входное сопротивление , кОм | 10 | - |
| Диапазон униполярного входного напряжения, В | - | 10,24 |
| Диапазон биполярного входного напряжения, В | -5,12 | 5,12 |
Табл. 4.1 Продолжение.
| Предельно допустимое значение униполярного входного напряжения, В | 0 | 10,5 |
| Предельно допустимые значения биполярного входного напряжения, В | -5,5 | 5,5 |
Номинальные значения напряжений источников питания: U1=5 В 5% и U2=-15 В 5%. Диапазоны их предельных изменений составляют U1=(4,5 - 5,5) В, U2=-(16,5 - 13,5) В.
В БИС К1113ПВ1 выходной ток ЦАП сравнивается с током, протекающим через входной резистор от источника сигнала. Тем самым формируется логический сигнал управления РПП. Стабилизация разрядных токов ЦАП осуществляется встроенным ИОН на основе стабилитрона со скрытой структурой.
Включение АЦП в режиме работы с униполярным входным напряжением предполагает подсоединение вывода 15 к цифровой земле (вывод 16). При этом на выходе встроенного ЦАП задается ток, равный току СР, но противоположной полярности. При работе АЦП с биполярным входным напряжением электрические сигналы на вывод 15 не подаются.
Тактирование РПП обеспечивается импульсами встроенного ГТИ с частотой следования 300-400 кГц. Установка РПП в исходное состояние и запуск его в режим преобразования производятся по внешнему сигналу "Гашение и преобразование". По окончании преобразования АЦП вырабатывает сигнал готовность данных" и информация из РПП поступает на цифровые выходы через каскады с тремя состояниями. Временные диаграммы работы АЦП
приведены на рис. 4.3.
Рис. 4.3 Временные диаграммы работы АЦП К1113ПВ1.
Напряжение от источников питания и входных сигналов подаются на БИС АЦП К1113ПВ1 в следующей последовательности: потенциал земли, напряжения питания, напряжения на входы управления, входное напряжение. Порядок снятия напряжений обратный. Допускается одновременная их подача и снятие.
ИС К1113ПВ1А использует два питающих напряжения +5 В и -15 В. В разрабатываемой схеме используются напряжения, получаемые с источника питания симулятора: +15 и -15 В. Необходимое для питания АЦП напряжение +5 В получается с помощью интегрального стабилизатора напряжения К142ЕН5В.
Известно, что при обработке аналоговых сигналов, изменяющихся с частотой, соизмеримой или большей, чем скорость работы АЦП, из аналогового сигнала приходится делать выборки. [5] Для этого некоторое значение сигнала в определенные моменты запоминается на время, необходимое для того, чтобы АЦП преобразовал его в двоичный код. Эту функцию выполняют устройства выборки и хранения аналогового сигнала (УВХ). Это своего рода аналоговые запоминающие устройства. Обычно схемы УВХ в своей основе имеют интегратор на операционном усилителе (ОУ) с высокоомной нагрузкой и малыми токами утечки, снабженный ключевыми схемами. Также УВХ выпускаются в виде комплексных ИС.
Необходимо определить целесообразность использования УВХ в разрабатываемом устройстве. Очевидно, что потребность в УВХ возникает, когда частота аналогового сигнала больше скорости работы АЦП. Если же за время преобразования t аналогового сигнала в цифровой код, изменение первого будет меньше разрешающей способности АЦП, необходимость в УВХ отпадает. Гантри симулятора проходит полный оборот за 40 с. Разделив 40 на 1024 получим время, соответствующее изменению кода на единицу: 40/1024=0,039 с, т.е. около 40 мс. Время же преобразования выбранного АЦП составляет 30 мкс, что более чем в 1000 раз меньше. Таким образом применение УВХ в данном устройстве не оправдано и аналоговый сигнал предполагается подавать непосредственно на вход АЦП после подгонки его под уровень входного сигнала (динамический диапазон) АЦП.
Определим точность преобразования с помощью 10-ти разрядного АЦП. Изменение выходного кода на единицу младшего разряда произойдет при повороте гантрии на угол равный:
Таким образом, разрешающая способность преобразователя, исходя из разрядности АЦП, составит 0,35.
Т.к. датчик положения гантри - потенциометр питается двуполярным напряжением (10В), АЦП будет использоваться в биполярном режиме. Напряжение полной шкалы регулируется резистором, подключенным к аналоговому входу. Схема включения АЦП показана на рис. 4.4.
1
питание +5В 10
питание -15В 12
цифровые
9 выходы
18 1 - 10
К1113ПВ1
сдвиг нуля (не исп,) 15
к ЭВМ
аналоговый вход 13
14
11 готовность готовность
аналоговая
земля
11
16
гашение и преобразование
цифровая земля
Рис. 4.4 Схема включения АЦП К1113ПВ1.
Как видно из описания выбранного АЦП для его связи с компьютером потребуется 13 линий. 10 линий непосредственно должны передавать цифровые данные о положении гантрии. Выход АЦП "Готовность" передает информацию о готовности данных. На вход "Гашение и преобразование" будет передаваться информация о приеме данных программой. Вход АЦП "Цифровая земля" подключается к земле компьютера.
Проблема нехватки разрядов регистра данных параллельного порта (8 разрядов вместо требуемых 10) решается подачей двух младших разрядов в регистр состояния, а 8-ми старших разрядов непосредственно в регистр данных. Порядок подключения разрядов АЦП к регистру данных таков: старший разряд АЦП к старшему биту регистра данных. Девятый и десятый разряды АЦП подключается соответственно к шестому и седьмому битам регистра состояния (считая, что младший бит - первый).
Выходная линия АЦП "Готовность" подключается к пятому биту регистра состояния.
На вход АЦП "Гашение и преобразование" сигнал подается со второго бита регистра управления. Данный бит является инверсным, т.е. при записи в него единицы, на линии появляется ноль.
Земля схемы подсоединяется к земле компьютера также через разъем параллельного порта.
Выбор именно этих битов параллельного порта обусловлен структурой самого порта, а также конструктивным и программным удобством их использования
Цоколевка параллельного порта и использование его контактов показано в приложении 1.
4.2 Ограничение уровня входного аналогового сигнала
Угол поворота гантри можно видеть на ее центральной части. Там находится неподвижная круговая шкала с отсчетами в градусах. Вид шкалы показан на рис. 4.5.
0
30 330
60 300
90 270
120 240
150 210
180
Рис. 4.5 Шкала углов поворота симулятора SLS – 9.
При вращении гантрии, метка перемещаясь вокруг шкалы, дает информацию об угле поворота. Датчик положения гантрии представляет из себя переменный многооборотный резистор, питающийся от двуполярного напряжения (10 В). Средняя точка резистора, при которой напряжение на его выходе равно нулю, соответствует нулю градусов положения гантрии симулятора.
При вращении гантрии в сторону 10 градусов происходит пропорциональное уменьшение напряжения на центральном выводе резистора, и к 180 градусам оно достигает -7,2 В. При вращении в эту сторону, можно достичь предельного для вращения в данную сторону угла 220 градусов при напряжении на резисторе -8,8 В. Если производить вращение от нуля в сторону 350 градусов, то к 180 градусам напряжение на датчике будет равно 7,2 В. Далее при предельном угле 140 градусов напряжение достигает 8,8 В. Т.е. при одинаковых углах поворота гантрии датчик угла может выдавать разные значения в зависимости от того вращением в какую сторону этот угол был достигнут.
Согласно заданию, обработку угла поворота гантрии необходимо проводить при ее вращении от 0 до 180 градусов в ту и другую стороны. Поэтому, с целью предотвращения потери точности, динамический диапазон АЦП будет использоваться в этом диапазоне углов. Т.е. уровень сигнала при повороте гантрии на 360 градусов будет соответствовать изменению выходного кода АЦП от 0 до 1023. Однако, нет гарантий, что не произойдет поворот гантрии на больший угол, следствием чего станет превышение уровня сигнала на входе АЦП с последующей возможностью выхода его из строя. В этом случае необходимо предусмотреть защиту входа АЦП от превышения допустимого уровня сигнала при случайном повороте гантрии более чем на 180 градусов от нулевого положения.
Как было сказано выше, уровень сигнала, соответствующий повороту гантрии от 180 до 180 градусов должен соответствовать полной шкале АЦП. При таком повороте гантрии сигнал изменяется от -7,2 В до 7,2 В. Полная же шкала АЦП соответствует диапазону -5,12 ... +5,12 В. Т.е. необходимо преобразовать сигнал с уменьшением его амплитуды (уменьшение должно быть линейным). Известно, что линейно уменьшить напряжение сигнала можно с помощью обычного резистивного делителя. Зная входное сопротивление АЦП, и задавшись током делителя, определяются номиналы его резисторов. При этом необходимо добавить переменный резистор для настройки делителя, т.к. номиналы резисторов непременно будут отличаться от расчетных. Однако, в данном случае простое применение резистивного делителя будет неоправданным, т.к. необходимо двустороннее ограничение аналогового сигнала по уровню для защиты входа АЦП.
Эффективным способом ограничения уровня входного сигнала является использование диодной защиты. [7] Для этого создаются два источника напряжения с напряжениями чуть меньшими уровней необходимого ограничения (на уровень падения напряжения на диоде). Затем они через диоды подключаются к линии, по которой проходит ограничиваемый сигнал. Источники напряжения можно создать с помощью делителей напряжения. Но здесь существует ограничение: эквивалентное сопротивление источника должно быть мало по сравнению с сопротивлением источника сигнала. Поэтому для эффективной работы такого ограничителя, в качестве источника напряжения требуется применение низкоомного делителя, что приведет к повышенному энергопотреблению. Кроме того обязательно потребуется настройка делителей. Кардинальным решением данной проблемы является использование в качестве источников напряжения параметрических стабилизаторов на стабилитронах. Но обычные стабилитроны общего применения не могут обеспечить необходимой точности: допуск на напряжение стабилизации у большинства из них колеблется в пределах 20 %, а температурный коэффициент стабилизации слишком велик. Тогда как АЦП требует ограничения уровня максимального положительного напряжения на уровне 5,5 В, а рабочий диапазон (полная шкала) кончается на отметке 5,12 В. Поэтому при применении обычных стабилитронов возможно или превышение допустимого напряжения на его входе, или обрезка рабочего сигнала. Выходом является применение специальных прецизионных стабилитронов. Но прецизионные стабилитроны на напряжения стабилизации менее 6 В не выпускаются.
Желательно конечно осуществлять ограничение входного сигнала непосредственно у входа АЦП, но так как требуемые стабилитроны отсутствуют , можно ограничить входной сигнал еще до уменьшения его уровня, т.е. ограничение произвести на уровне 7,2 В (прецизионные стабилитроны с близкими напряжениями стабилизации существуют). Затем, сигнал, уровень которого не может превышать 7,2 В уменьшается по амплитуде, и подается на вход АЦП. При необходимом заданном коэффициенте передачи, уровень сигнала на входе АЦП не превысит предельного значения. Правда у данного метода есть недостатки: при настройке коэффициента передачи, а также при выходе из строя узла, отвечающего за уменьшение уровня сигнала, напряжение на входе АЦП может превысить допустимое значение. Но построение защиты от всех возможных неисправностей приведет к чрезмерному усложнению схемы, кроме того нет гарантий, что не откажут сами устройства защиты. При выбранном способе защиты вход АЦП защищен от превышения уровня сигнала за счет поворота гантрии сверх допустимого диапазона, а также от любых неисправностей, включая неправильную коммутацию проводов, которые могут произойти вне схемы разрабатываемого устройства сопряжения. Принципиальная схема устройства защиты от превышения уровня аналогового сигнала представлена на рис. 4.6.
Рис.4.6 Двусторонний ограничитель уровня для защиты АЦП от
превышения уровня входного аналогового сигнала.
Стабилитроны VD1 и VD2 совместно с резисторами R1 и R2 для задания тока стабилизации образуют источники опорного напряжения. Диоды VD3 и VD4 используются для ограничения уровня аналогового сигнала.
В источниках напряжения, используемых для цепей защиты, будут используются два прецизионных стабилитрона марки 2С166В, с номинальным напряжением стабилизации 6,6 В. Этот кремниевый стабилитрон малой мощности предназначен для применения в качестве источника номинального опорного напряжения 6,6 В в цепях постоянного тока в диапазоне токов стабилизации 3...10 мА. Выпускается в стеклянном корпусе с гибкими выводами. Тип стабилитрона приводится на корпусе. Со стороны вывода, положительного для рабочего режима (анода) на корпусе наносится белая полоса. Масса стабилитрона не более 5 г. [8] Основные электрические параметры стабилитрона 2С166В приведены в табл. 4.2.
Табл. 4.2.
Основные электрические параметры стабилитронов 2С166В.
| Номинальное напряжение стабилизации*, В | 6,6 |
| Разброс напряжения стабилизации*, % | -5...0...5 |
| Температурный коэффициент напряжения стабилизации*, % на С | 0,0005% |
| Уход напряжения стабилизации*, мВ | -2...-0.5...+1,5 |
| Временная нестабильность*, мВ | 1,4 |
| Дифференциальное сопротивление при Т=25С*, Ом | 8...11...20 |
| Минимальный ток стабилизации, мА | 7,5 |
| Максимальный ток стабилизации, мА | 10 |
| Рассеиваемая мощность, мВт | 70 |
| Температура окружающей среды, С | -60...+125 |
* При токе стабилизации равном 7,5 мА.
Для обеспечения нормальной работы ограничителей напряжения, необходимо сигнал от датчика подавать через резистор. Номинал резистора должен быть таким, чтобы при срабатывании одного из ограничителей, ток через соответствующий стабилитрон не превышал установленного предела. Максимально возможный уровень сигнала, поступающий на схему при предельном повороте гантрии симулятора не превышает 9 В. Ограничение сигнала проводится на уровне 7,3 В. Значит падение напряжения на входном резисторе R3 не превысит 1,7 В. Выбрав номинал резистора R1 равным 5,1 кОм, максимальный ток ограничителя устанавливается на уровне 0,3 мА. Т.е. при срабатывании ограничителей, приращение тока через любой из стабилитронов не превысит 0,3 мА, что не выведет его из рабочего режима.
Определим номиналы резисторов R1 и R2, задающих ток через стабилитроны VD1, VD2. Т.к. стабилизированное напряжение 6,6 В будет получаться из 15 В, а номинальный ток стабилизации равный 7,5 мА, можно определить номиналы резисторов:
Ом;
Выбрав ближайшее стандартное значение 1,1 кОм, и взяв резистор с допуском 5% ток стабилизации ограничиться в пределах 7,2...8,0 мА, что допустимо для выбранных стабилитронов.
Ограничение сигнала на уровне 7,3 В обеспечивается подключением сигнальной линии к источникам опорного напряжения через диоды VD3,VD4. Для этого используются германиевые диоды Д18, имеющие номинальное прямое падение напряжения 0,7 В. Выбор данных приборов обусловлен подходящим прямым падением напряжения, а также дешевизной и их малыми размерами. Максимальный постоянный прямой ток через диод равен 16 мА.
4.3 Преобразование аналогового сигнала
После устройств ограничения уровня входного сигнала необходимо этот сигнал уменьшить для того, чтобы он подходил под параметры АЦП. Это можно сделать несколькими способами. Самый простой и дешевый способ - использование резистивного делителя. Но это не очень хорошее решение: потребуется учитывать входное сопротивление АЦП, сопротивление, стоящее на входе (необходимое для ограничителей), а также параметры самого датчика. При этом схема потребует сложной настройки, и при изменении какого-либо параметра, произойдут нарушения в ее работе - изменения напряжений срабатывания ограничителей, уровня сигнала на входе АЦП. Приемлемым решением является использование операционного усилителя (ОУ) в качестве устройства преобразования напряжения сигнала для подачи на вход АЦП, а также в качестве буфера. Входные токи ОУ ничтожно малы, и поэтому ограничивающий резистор, стоящий на входе, не окажет влияния на уровень (напряжение) сигнала. Кроме того напряжение входного сигнала не будет зависеть от входного сопротивления АЦП. ОУ необходимо использовать в неинвертирующем режиме, для обеспечения максимального входного сопротивления. Но при таком включении нельзя добиться требуемого коэффициента усиления (
Похожие работы
... часть пульта управления (или устройства вывода данных) оператора-рентгенолога. Аналогичные пульты управления можно применять и в других системах получения изображения, например на основе ядерного магнитного резонанса или компьютерной томографии. Цифровое изображение можно записать на магнитном носителе, оптическом диске или же на специальном записывающем устройстве, способном постоянно вести ...

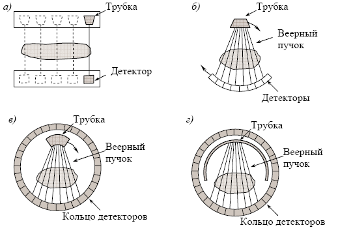

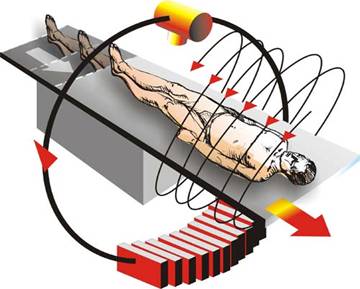
... томография Спиральная КТ используется в клинической практике с 1988 года, когда компания Siemens Medical Systems представила первый спиральный компьютерный томограф. Спиральное сканирование заключается в одновременном выполнении двух действий: непрерывного вращения источника – рентгеновской трубки, генерирующей излучение, вокруг тела пациента, и непрерывного поступательного движения стола с ...

... немецких, американских и канадских больницах уже имеются 320-срезовые компьютерные томографы. Эти томографы, впервые представленные в 2007 году, являются новым витком эволюции рентгеновской компьютерной томографии. Они позволяют не только получать изображения, но и дают возможность наблюдать почти что «в реальном» времени физиологические процессы, происходящие в головном мозге и в сердце. ...
... и выполняют тончайшие операции. Таких примеров использования КТ, как метод контроля за выполнением хирургических вмешательств, можно привести много. Один из них — применение мобильных компьютерных томографов (Tomoscan M, Philips) в операционных во время хирургических вмешательств, когда, например, топография структур головного мозга после вскрытия черепной коробки и вмешательства на патологическом ...
0 комментариев