Навигация
Контроллер промышленного назначения
18219
знаков
2
таблицы
8
изображений
Разработка устройства логического управления (контроллера) промышленного назначения
Введение.
В данном курсовом проекте поставлена задача разработать некий промышленный контроллер для работы в условиях производства. Задача может быть выполнена на микропроцессоре с гибкой программируемой логикой, а также на дискретных элементах с жесткой логикой.
Реализация на микропроцессоре обладает весомыми преимуществами. Гибкая логика, возможность легкой модернизации контроллера, перспективность.
Программируемая логика реализована на микропроцессоре типа МК-51 фирмы ATMEL – AT89C51, который благодаря встроенной FLASH памяти, обладает возможностью электрического перепрограммирования, а значит быстрой модернизации управляющей программы.
Наличие микропроцессора в современных контроллерах позволяет создавать сложные, гибкие, компактные и надежные системы управления с централизованным управлением и диагностикой.
Структурный синтез цифрового автомата
Обозначим структуру проектируемого микроконтроллера.
Управляющий логический блок на основе микропроцессора.
Блок сбора информации и преобразования ее в вид, требуемый для обработки микропроцессором.
Блок гальванической развязки входных сигналов и сигналов, поступающих на микропроцессор.
Блок связи с исполнительными устройствами (включающий гальваническую развязку) для преобразования выходных сигналов микропроцессора в мощные сигналы управления.
Блок начального сброса микропроцессора.
Блок индикации входных и выходных сигналов.
Блок электропитания контроллера.
2. Разработка принципиальной схемы.
1. Управляющий логический блок.
В качестве основы для контроллера выбран популярный микропроцессор типа MK-51 от фирмы Atmel – AT89C51.
Его основные преимущества перед подобными процессорами иных фирм:
Полностью совместим с семейством МК-51.
4 кб встроенной перепрограммируемой Flash памяти (включая перепрограммирование непосредственно на плате по протоколу SPI) при не менее 103 циклов перезаписи.
Работа на частотах от 0 до 40 МГц.
128х8 бит ОЗУ.
32 программируемых линии портов ввода/вывода.
Два 16-битных таймера счетчика
Шесть источников прерываний
Программируемый последовательный канал совместимый с RS-232-S.
2. Блок сбора информации и преобразования ее в вид, пригодный для обработки микропроцессором.
Входная информация и выходная информация проходит через внешний разъем типа РШ2Н-2-16.
В таблице 1 приведен список и условное обозначение входных и выходных сигналов из задания.
Табл. 1.
| Наименование сигнала по заданию | Присвоенное название |
| Входные сигналы | |
| S1 - контактный датчик | S1 |
| S2 – контактный датчик | S2 |
| S3 – контактный датчик | S3 |
| Ua - Аналоговый сигнал напряжения в диапазоне 0..10В | UA |
| Ev – датчик освещенности 0..200лк | EV |
| Выходные сигналы | |
| Электромагнит Y1 | Y1 |
| Электромагнит Y2 | Y2 |
| Тр. Модуль – VT1 | Y3 |
| Тр. Модуль – VT2 | Y4 |
| Условия переходов автомата | |
| S1 Ú U < 7 B | X1 |
| EV < 40 лк | X2 |
| (S1 Ú S2) Ú U > 1 B | X3 |
| S3 ^ EV < 50 лк | X4 |
| S2 ^ U < 3 B | X5 |
| EV > 100 лк | X6 |
Сигнал с датчика освещенности (фоторезистора СФ2-1) снимаем по такой схеме:
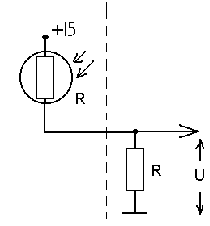
Далее сигнал поступает на делительный мост из резисторов, формирующий нужный уровень сигнала, подаваемый на схему из двух компараторов. На не инвертирующий вход компаратора подается измеряемая величина напряжения, а на инвертирующий – величина опорного напряжения, при достижении которой значение логического сигнала на выходе компаратора меняется на противоположное. Срабатывание при нужном значении освещенности регулируется подстроечными резисторы марки РП1 – 48 10КОм±10%.
Компаратор LM29000.
Его электрические характеристики:
Максимальный потребляемый ток 2 мА.
Напряжение смещения 1 мВ.
Корпус DIP-14.
Для организации высокостабильного опорного напряжения выбраны специализированная микросхема LM4130 фирмы National Semiconductor.
Выходное опорное напряжение 4.096 В
Погрешность выходного напряжения 0.05%
Температурный коэффициент нестабильности 3*10-6/оС
Минимальное входное напряжение 5 В
Потребляемый ток 1 мА
Максимальный выходной ток 30-50 мА
Изменение выходного напряжения (при Iвых=30..50 мА) 0.05%
По такой же схеме организован прием и формирование логических сигналов UA на микропроцессор.
Похожие работы
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... в алгоблоки; конфигурирование; установку параметров настройки; установку начальных условий; запись информации в программируемое постоянное запоминающее устройство. Сведения о процедурах технологического программирования представлены в таблице. Табл.4.1. Процедура код Выполняемые операции тестирование 00 Комплексный тест ПЗУ и ОЗУ 01-04 Тестирование микросхем ПЗУ 05-08 ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... информации о количестве полученной потребителем или выработанной производителем тепловой энергии, температуре, давлении, объеме (массе) теплоносителя и о времени работы в открытых и закрытых водяных системах теплоснабжения при давлениях до 1,6 МПА (16 кгсм2) и температурах до +150 °С. Область применения - теплоэнергетика, системы коммерческого учета расхода горячей воды и тепловой энергии, ...
0 комментариев