Навигация
Методика измерения перемещений при помощи лазерных интерферометров
9874
знака
0
таблиц
3
изображения
С О Д Е Р Ж А Н И Е
Стр.
Принципы измерения расстояний и линейных перемещений....................3
2 Описание принципа работы и оптических схем интерферометров
со счетом полос..............................................................................................5
2.1 Интерферометр со счетом полос на основе квадратурных сигналов........5
Интерферометр со счетом полос на основе частотной модуляции............7
3 Исследование погрешности измерения перемещений................................10
Анализ основных состовляющих погрешности измерения
перемещений...................................................................................................10
3.2 Исследование погрешности показателя преломления воздуха...................11
Определение погрешности измерения расстояния......................................12
3.4 Определение положения ближней и дальней зоны.....................................14
ПРИЛОЖЕНИЯ......................................................................................................15
СПИСОК ЛИТЕРАТУРЫ ....................................................................................25
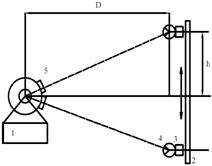
1. Принципы измерения расстояний и линейных перемещений
Обобщенная схема измерения расстояний и линейных перемещений
посредством ЛИС на основе двухлучевого интерферометра изображена
на рис. 1а.
Рассматривая принципы и методы измерения, излучение лазера 1
будем считать идеальной плоской волной.
Интерферометр, состоящий из светоделителя 2, опорного отра-
жателя 3 и измерительного отражателя 4, настроен на бесконечно
широкую полосу. Интенсивность интерференционного сигнала I на фо-
топриемнике 5 изменяется по закону (рис. 1б)
I=I0+I~* COS (L), (1)
где I0 и I~ - постоянная составляющая и амплитуда переменной сос-
тавляющей сигнала соответственно; 2L - геометрическая разность
хода интерферирующих пучков; - длина волны излучения.
Расстояние от нуля интерферометра О до измерительного отра-
жателя 4:
![]() (2)
(2)
где P - порядок интерференции, - фаза интерференционного сигна-
ла I, определяемого формулой (1).
2 Описание принципа работы и оптических схем интерферометров со
счетом полос.
Метод счета полос заключается в измерении (счете) числа пе-
риодов изменения интерференционного сигнала при изменении ГРХ.
Для предотвращения ложного счета вследствие механических вибраций
и турбулентности воздуха осуществляют реверсивный счет, при кото-
ром определяют знак каждого счетного периода приращения порядка
интерференции.
Применяют два способа реверсивного счета полос.
2.1 Интерферометр со счетом полос на основе квадратурных сигналов
Квадратурными называют два сигнала, содержащие информацию об
одной и той же ГРХ, но сдвинутые по фазе на /2:
I1(t)=I10+I1~*COS[(t)] ,
(3)
I2(t)=I20+I2~*SIN[(t)] .
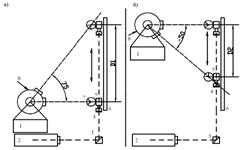
Фиксируя пересечения сигналами (3) среднего уровня (рис. 2б),
измеряют приращения ГРХ c дискретой /4. Знак каждой дискреты оп-
ределяют по фазовому сдвигу между сигналами, который в зависимости от направления изменения ГРХ равен /2 или 3 /2.
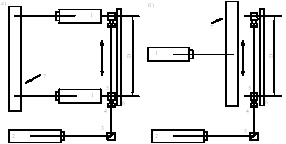
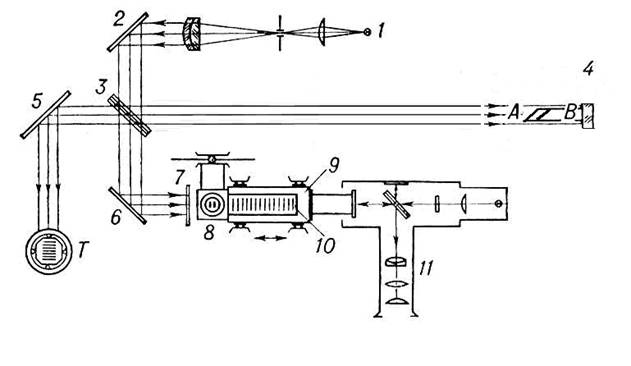
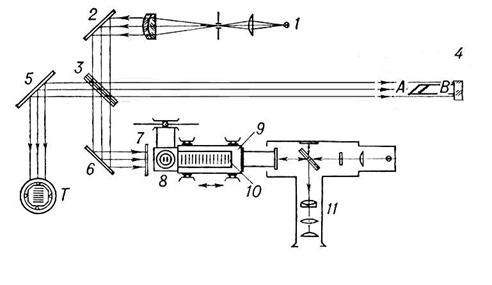
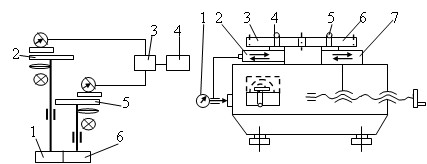
На рис. 2а изображена схема ЛИС, где квадратурные сигналы
получают оптическим способом. Плоскость поляризации излучения од-
ночастотного лазера 1 составляет угол 450 с плоскостью чертежа.
Фазовая пластина /8 - позиция 3, одна из собственных осей кото-
рой лежит в плоскости чертежа, вносит в интерферометр, образован-
ный светоделительной призмой-куб 2 и отражателями 4, разность
ГРХ, равную /4, для составляющих излучения лазера параллельной и
перпендикулярной плоскости чертежа. Поляризационная призма-куб 6
разделяет эти составляющие. В результате интерференционные сигна-
лы I1 и I2 на фотоприемниках 6 сдвинуты по фазе на /2.
Информационный спектр сигналов (3) содержит постоянные сос-
тавляющие I10 и I20. Подобные ЛИС называют системами без переноса
спектра сигнала или системами "постоянного тока".
Метод счета полос на основе квадратурных интерференционных
сигналов не ограничивает скорость изменения и максимальное значе-
ние диапазона измеряемых расстояний. Время измерения в ЛИС, рабо-
тающих на основе этого метода, определяется только пропускной
способностью электронного тракта и может составлять сотые доли
микросекунды (скорость счета полос 100 МГц), что при дискpете /4
соответствует скорости приращения ГРХ 16 м/с. Измеряемые расстоя-
ния превышают десятки метров. Минимальную погрешность измерения
расстояния определяет дискрета счета, чаще всего равная/8.
Похожие работы
... -электронных приборов при непосредственном участии автора. Вторая глава. Во второй главе рассмотрены разработанные методы проведения исследований метрологических установок и стендов для поверки и калибровки геодезических приборов для измерения превышений. Метод исследования короткопериодической погрешности измерения вертикальных углов геодезических приборов. Важной задачей при исследовании ...

... калибровки и настройки. 4 Нормативные ссылки 4.1 ГОСТ Р 8-82 Станки металлорежущие. Общие требования к испытаниям на точность. 4.2 ГОСТ Р 22267-76 Станки металлорежущие. Схемы и способы измерений геометрических параметров. 4.3 ГОСТ Р 23597-79 Станки металлорежущие с числовым программным управлением. Обозначение осей координат и направлений движения. Общие положения. 4.4 ГОСТ Р 12.2.009 ...


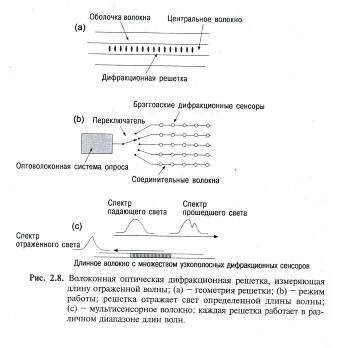

... процедура установки датчиков должна стать частью комплексной задачи конструирования и мониторинга механических и других свойств системы. Впрочем, нынешние технологии от этого еще весьма далеки. 1.2. Требования к системам датчиков в интеллектуальных структурах Полная характеризация контролируемой структуры только с помощью сети сенсоров невозможна. Действительно, в любой измерительной ...
... угла от эталонов к образцовым и рабочим угловым мерам, поверки и градуировки угломерных приборов и специальных угловых мер (шаблонов), а также для непосредственного измерения угловых изделий. По ГОСТу 2875 - 88 "Меры плоского угла призматические. Общие технические условия" предусмотрено пять типов угловых мер (рис. 4.20): меры типа 1 выполнены со срезанной вершиной угла и имеют малые (до 9о) ...
0 комментариев