Навигация
ОБЗОР МЕТОДОВ ПРЕОБРАЗОВАНИЯ СИЛЫ
17686
знаков
2
таблицы
1
изображение
3. ОБЗОР МЕТОДОВ ПРЕОБРАЗОВАНИЯ СИЛЫ.
Для измерения силы используют много методов: индуктивный, струнный, тензорезисторный.
У струнных датчиков выходной сигнал - частота. Это выгодно с частотными сигналами. Они обеспечивают высокую точность отсчета и независимость показаний линии связи, но эти датчики не могут быть выполнены на низкие диапазоны измерения, на широкий диапазон вибрационных нагрузок, не могут работать в широком температурном диапазоне. Струнные датчики сложны и дороги в изготовлении.
Индукционные датчики просты, дешевы, технологичны, но обладают низкими точностными свойствами.
Тензорезисторные датчики благодаря своим преимуществам получили широкое применение (до 98% от числа всех датчиков). Они просты, надежны, могут питаться как от постоянного, так и переменного источника питания. Обеспечивают широкий диапазон работы и практически не снижают жесткости конструкции системы. Недостатком этих датчиков является низкая величина выходного сигнала, недостаточно высокая точность преобразования и специфическая технология.
В нашем случае выбираем в качестве метода преобразования силы тензорезисторный метод.
4. ОБЗОР ДАТЧИКОВ СИЛЫ.
Большое распространение для измерения силы получили тензорезисторные датчики, структурная схема которых представляет последовательное соединение трех измерительных преобразователей:
![]()
![]()
![]()
![]()
|
|
|
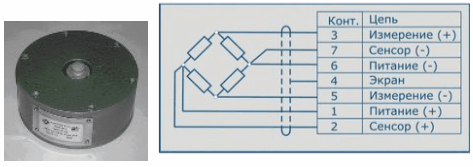
Где УЭ упругий элемент, ТР тензорезистор, ИЦ измерительная цепь. Измеряемая сила Fx прикладывается к УЭ так, что он деформируется на величину Е1. Деформация УЭ воспринимается установленным на него тензористорами, которые изменяют свое сопротивление на величину ЕR относительных единиц. Относительное изменение сопротивления тензорезистора измерительной цепью преобразуется в величину выходного сигнала Uвых. В тензорезисторных датчиках силы получили распространение две измерительные цепи: неравновесный мост и делитель напряжения, который применяется в тех случаях, когда ограничены габариты датчика или если требуется измерять только динамическую составляющую.
На конструкцию датчика силы, его характеристики существенно влияет конструкция упругого элемента. В зависимости от этого датчики силы можно подразделить на датчики со стержневым, кольцевым, мембранным, балочным, упругим элементом.
Датчик со стержневым упругим элементом состоит из цилиндрического упругого элемента на наружной поверхности которого установлены тензорезисторы и компенсационные сопротивления, силовой и вспомогательной подушек, монтажной колодки, кожуха и разъема. Упругий элемент имеет хвостовик предназначенный для крепления датчика на объекте измерения. На нижней части упругого элемента предусмотрена выточка для крепления кожуха и площадка для установки разъема. Силовая и вспомогательные подушки контактируют между собой по сферической поверхности. Измеряемая сила прикладывается к силовой подушке и передается через сферический контакт вспомогательной подушке и упругому элементу, деформирующемуся под действием этой силы. Упругий элемент в зависимости от предела измерения силы может быть выполнен и в виде сплошного стержня.
В конструкции датчика силы с кольцевым упругим элементом вместо стержня установлено кольцо с двумя жесткими участками вдоль вертикального диаметра, т.е. вдоль направления действия силы. Тензорезисторы приклеены на внутренней и наружной поверхности кольца, на линии горизонтального диаметра.
Датчик силы с мембранным упругим элементом. Измеряемая сила прикладывается к силовой подушке, удерживаемой между крышкой и жестким центром мембраны, пружиной. В результате действия силы мембранный УЭ деформируется. Радиальные деформации мембраны воспринимаются наклеенными на нее тензорезисторами, собранными в мостовую ИЦ, вход и выход которой выведены на разъем. Резьбовой хвостовик предназначен для крепления датчика на объекте.
Датчик силы с балочным УЭ. Основным узлом этого датчика является чувствительный элемент выполненный в виде балки равного сечения, с жестко заделанным одним концом, с наклеенными на верхнюю и нижнюю части ее, тензорезисторами. Измеряемая сила прикладывается к штоку, закрепленному на втором конце балки.
Похожие работы
... марок ФРГ. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т. д.) и новых материалов непрерывно расширяются сферы применения датчиков, недоступные ранее из-за их высокой цены. ЗАКЛЮЧЕНИЕ До недавнего времени конструкторы относились с предубеждением к емкостным датчикам, полагая, что схемы с емкостными ...
... ) 0,1098 4.4 Выбор сторожевого таймера. Т.к. работа системы происходит в автономном режиме и не предусматривает работу оператора с ней, то для случая зависания микро-ЭВМ в схему системы сбора данных добавляется интегральная микросхема MAX690AMJA – сторожевой таймер. Выполняющая две основные функции: выведение МП из состояния зависания и сброс МП при включении питания. Основные характеристики ...
... называется периодом (t). Оно состоит из длительности самого импульса (t1) и промежутком между импульсами (t2). Значения t1 и t2 можно рассчитать по следующим формулам: t1 = 0.693(R1+R2)C; t2 = 0.693R2C; 3.3 Проектирование панели управления устройством Рисунок 3.8 Панель управления Панель управления представлена кнопками, 7сегментными индикаторами, а также лампочкой, указывающей на ...
... центра для котельных установок. Создание такого центра обусловлено техническим заданием руководства УЖКХ, для того чтобы иметь постоянный контроль за процессом работы котельных установок в режиме реального времени. Диспетчерский центр должен находиться в здании УЖКХ п. Варламово. 3.1 Аппаратная часть В состав аппаратной части входи входят: а. Компьютер б. сетевая карта в. модем ...
0 комментариев