Навигация
Колебания пусковой установки
5281
знак
0
таблиц
11
изображений
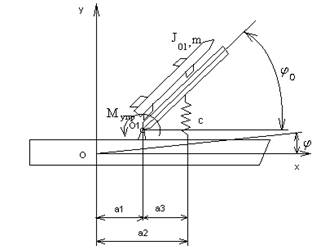 |
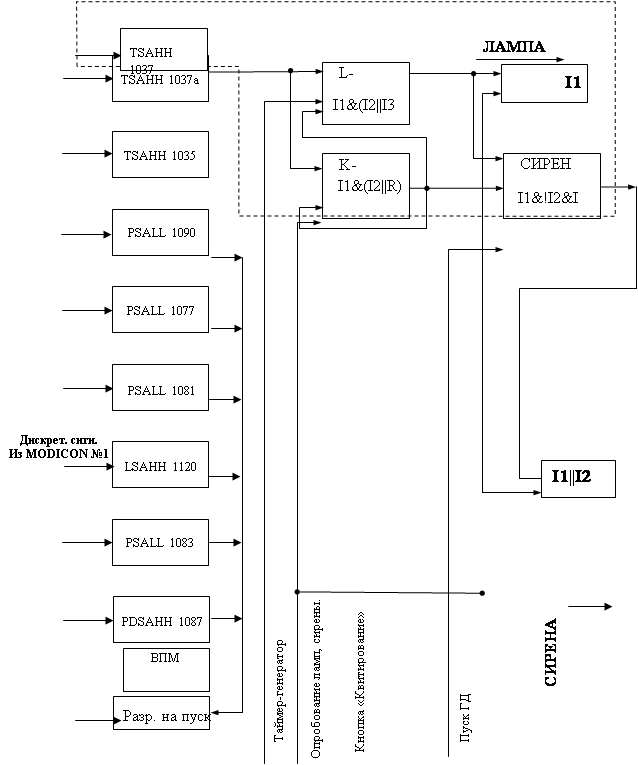
Рис.1
Задание на проект:
Пусковая установка находится на корабле, совершающем колебания (угол ![]() - стационарная функция известного вида.)
- стационарная функция известного вида.)
В момент времени t = tк производится пуск ракеты.
Требуется:
1. Получить уравнение малых колебаний ракеты с направляющей с учетом воздействия со стороны корабля.
2. Определить закон изменения момента управляющего двигателя Мупр(t), обеспечивающего минимум среднего значения угловой скорости пусковой установки к заданному моменту времени t = tк. Мощность двигателя ограничена ( | Мупр.|![]() )
)
Расчетная схема:
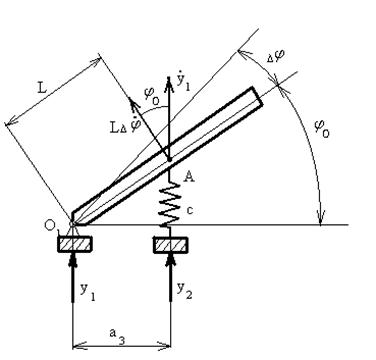
Рис.2
Где точка А считается центром масс платформы с ракетой.
![]() и
и ![]() - кинематическое возбуждение точек основания
- кинематическое возбуждение точек основания
![]() - угол подъема платформы в стационарном состоянии
- угол подъема платформы в стационарном состоянии
![]() - приращение угла (считается малым)
- приращение угла (считается малым)
Для определения функций кинематического возбуждения воспользуемся схемой:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.3
Где ![]() ,
, ![]() или с учетом малости воздействия
или с учетом малости воздействия
![]() ,
, ![]()
Тогда возмущающие функции будут иметь вид:
![]() (1)
(1)
![]() (2)
(2)
Кинетическая энергия системы:
![]() (3)
(3)
![]() - абсолютная скорость центра масс платформы,
- абсолютная скорость центра масс платформы,
![]() - момент инерции платформы с ракетой, относительно центра масс.
- момент инерции платформы с ракетой, относительно центра масс.
По теореме косинусов: ![]() (4),
где
(4),
где ![]()
Таким образом, кинетическая энергия системы запишется в виде:
![]() (5)
(5)
Потенциальная энергия системы:
Поскольку перемещения системы считаются малыми, а пружина обладает достаточной жесткостью, потенциальной энергией силы тяжести пренебрегаем.
То есть потенциальная энергия системы будет потенциальной энергией, накопленной в пружине.
![]() (6)
(6)
С учетом (1) и (2) получаем:
![]() (7)
(7)
Для записи уравнения движения воспользуемся уравнением Лагранжа:
![]() (8)
(8)
![]() (9)
(9)
![]() (10)
(10)
Учитывая, что ![]() получим:
получим:
![]()
![]() (11)
(11)
![]() (12)
(12)
Подставляя (11) и (12) в уравнение Лагранжа, получим следующее:
![]() (13)
(13)
Уравнение движения будет иметь вид:
![]() (14)
(14)
Или, с учетом управляющего момента:
![]() (15)
(15)
Считаем, что на систему действуют функция: ![]()
где А –амплитуда, а ![]() -частота вынуждающих функций.
-частота вынуждающих функций.
Уравнение движения можно переписать в виде:
![]() (16)
(16)
где ![]()
Решение этого дифференциального уравнения состоит из двух частей:
Похожие работы
... камере понижается ниже допустимой , то в данном случае включаются электронагреватели , которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 3.2 Работа узлов функциональной схемы автоматизации холодильного модуля. Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...




... 26 единиц). Р-9А стала последней боевой ракетой в группировке РВСН на кислородно-керосиновом топливе. Она состояла на вооружении до середины 70-х годов. Межконтинентальная баллистическая ракета Р-16 (8К64) / Р-16У (8К64У)/SS-7 (Saddler) Тактико-технические характеристики Максимальная дальность стрельбы, км 13000 Стартовая масса, т ...
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
0 комментариев