Навигация
Решение однородного дифференциального равнения
5281
знак
0
таблиц
11
изображений
1. Решение однородного дифференциального равнения
2. Частное решение неоднородного уравнения
Решение однородного уравнения имеет вид:
![]()
![]() (17)
(17)
Частное решение неоднородного уравнения при произвольном воздействии будет выглядеть так:
 (18)
(18)
Тогда общее решение дифференциального уравнения:
 (19)
(19)
Выражение для скорости:
![]() (20)
(20)
Компенсирующий двигатель включается в момент времени ![]() .
.
Он работает до момента времени ![]() . Мощность двигателя – ограничена.
. Мощность двигателя – ограничена.
Интегрирование начинаем в момент времени ![]() , но т.к.
, но т.к. ![]() функция известного вида, а начальный момент времени - произвольный, то не важно, с какого момента начинать интегрирование, поэтому, начальный момент времени принимаем
функция известного вида, а начальный момент времени - произвольный, то не важно, с какого момента начинать интегрирование, поэтому, начальный момент времени принимаем
нулевым. Исходя из подобных соображений, начальные условия так же считаем нулевыми, т.е. ![]()
Таким образом, приходим к выражению для скорости:
 (21)
(21)
В момент пуска ракеты угловая скорость вращения платформы должна быть минимальной, в идеале – нулевой, поэтому:
 (22)
(22)
Если добиться нулевого значения угловой скорости не представляется возможным, то потребуем нахождения угловой скорости в заданных пределах ![]()
Идеология решения такой задачи такова: Разобьем подинтегральное выражение на два интеграла. Тогда выражение для скорости запишется в следующем виде:

(23)
Необходимо добиться того, чтобы подинтегральные функции имели разные знаки, при этом значения интегралов должны быть равны по модулю.
![]()
Функция управляющего момента будет иметь такой вид:
![]() (23)
(23)
где ![]()
Область, ограничивающая управляющий момент:
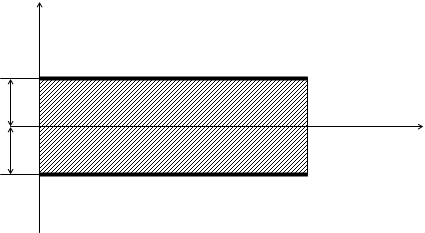
![]()
![]()
![]()
![]()
Рис 4.
Если удастся одновременно выполнить оба этих условия, значит задачу можно считать решенной. Если же нет, то можно будет оценить, насколько мы можем компенсировать начальное возмущение, располагая определенной мощностью.
Задаемся следующими параметрами установки:
![]()
Тогда остальные параметры будут вычисляться по формулам:
![]()
![]()

Амплитудное значение возмущающей функции: ![]()
Рассмотрим наиболее «неприятный» случай – когда частота возмущающей функции совпадает с собственной частотой системы, т.е. ![]()
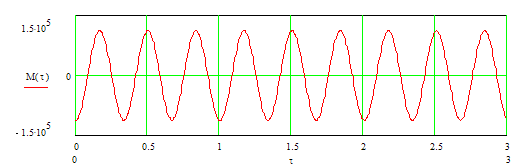
График возмущающей функции ![]() :
:
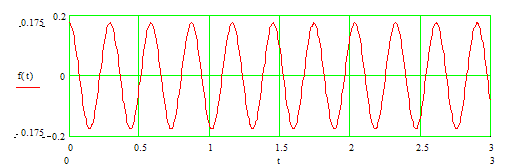
Рис. 5
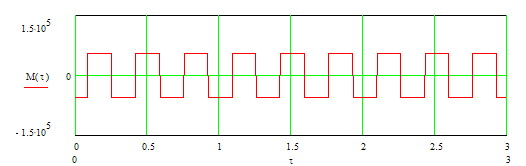
Момент времени пуска ракеты ![]()
График управляющего момента:
Рис.6
Обозначим функцию ![]()
График этой функции:
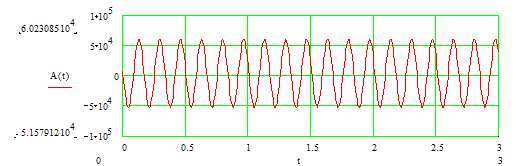
Рис. 7
График функции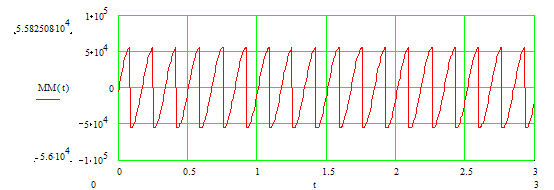
Рис.8
Представим функции ![]()
![]() на одном графике:
на одном графике:
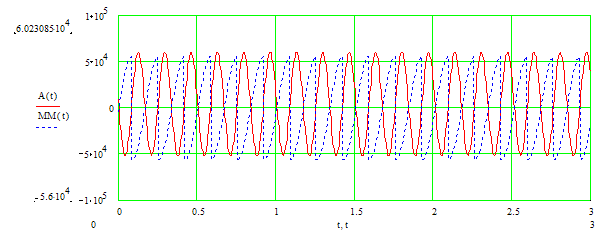
Рис 8.
Тогда для амплитудного значения управляющего момента ![]()
![]() , времени пуска ракеты равным 15 с, для заданных параметров установки, значение угловой скорости равно:
, времени пуска ракеты равным 15 с, для заданных параметров установки, значение угловой скорости равно:
Амплитудное значение управляющего момента было получено путем подбора, при этом выбиралось минимальное значение угловой скорости.
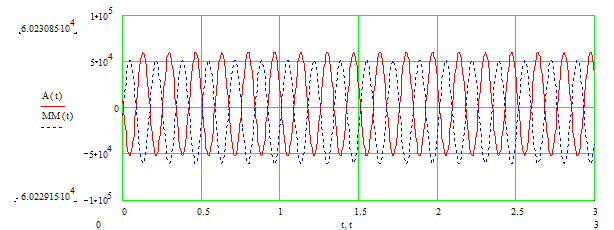
Для сравнения, выберем управляющий момент двигателя в виде произведения амплитудного значения момента на косинус с обратным знаком, т.е. :
![]()
Вид функции управляющего момента представлен на рисунке:
С учетом наложения ![]() :
:
Тогда для получения аналогичного значения угловой скорости, а именно для ![]() потребуется амплитудное значение управляющего момента, большее в два раза, чем при предыдущем случае, а именно
потребуется амплитудное значение управляющего момента, большее в два раза, чем при предыдущем случае, а именно ![]() .
.
Таким образом, обеспечив вид функции управляющего момента двигателя, как ![]()
можно добиться минимального значения угловой скорости к моменту времени пуска ракеты, используя двигатель мощностью меньшей, чем в случае чисто косинусоидального вида управляющего момента.
По найденному амплитудному значению управляющего момента можно подобрать двигатель требуемой мощности, закон движения которого будет изменяться согласно предъявляемым выше требованиям.
Похожие работы
... камере понижается ниже допустимой , то в данном случае включаются электронагреватели , которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 3.2 Работа узлов функциональной схемы автоматизации холодильного модуля. Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...




... 26 единиц). Р-9А стала последней боевой ракетой в группировке РВСН на кислородно-керосиновом топливе. Она состояла на вооружении до середины 70-х годов. Межконтинентальная баллистическая ракета Р-16 (8К64) / Р-16У (8К64У)/SS-7 (Saddler) Тактико-технические характеристики Максимальная дальность стрельбы, км 13000 Стартовая масса, т ...
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
0 комментариев