Навигация
2.2.2.1 Контактный режим
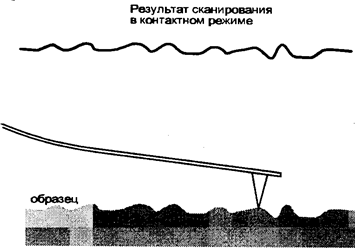 |
Кантилевер непосредственно касается иглой поверхности образца и работает на отталкивание от поверхности (Рис. 4).
Рис.4
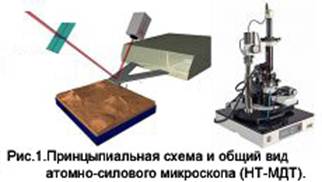
В идеальных условиях сила воздействия на образец определяется прогибом и жесткостью кантилевера. Во время сканирования регистрируется отклонение зонда по углу при помощи оптической системы из лазера и четырех секционного зонда (Рис. II).
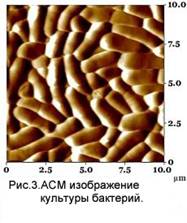
Контактный режим работы ССМ можно разделить в зависимости от окружающей среды на воздушный и жидкостной варианты. Воздушный удобней и проще в работе, однако в жидкостном можно достигнуть меньших сил взаимодействия кантилевера с образцом и, следовательно, исследовать более мягкие образцы без разрушения. Кроме того, в жидкостном варианте некоторые объекты могут наблюдаться только в естественной для них среде - это клетки и другие биологические объекты, растворы органики и далее будет рассматриваться работа с воздушным вариантом ССМ.
Воздушный контактный ССМ хорошо зарекомендовал себя при исследовании достаточно жестких объектов, таких как кристаллы микросхем, наноструктуры, пленки различных неорганических материалов и многое другое. Вместе с тем с его помощью удается получать достатчно хорошие результаты при исследовании биологических объектов (клеток, вирусов), ЛБ-пленок органических материалов.
Силы, действующее мелису кантилевером и образцом
Здесь будут кратко рассмотрены силы взаимодействия между кантилевером и образцом. При приближении кантилевера к поверхности образца на него начинает действовать сила Ван-дер-Ваальсового притяжения
 |
Рис. 5
Она достаточно дальнодействующая и заметна с расстояния десятков ангстрем. Затем на расстоянии в несколько ангстрем начинает действовать сила отталкивания. Во влажном воздухе на поверхности образца присутствует спой воды. Возникают капиллярные силы, дополнительно прижимающие кантилевер к образцу и увеличивающие минимально достижимую силу взаимодействия. На разных образцах и с разными кантилеверами кривая силы может заметно отличаться, Достаточно часто может возникать электростатическое взаимодействие между зондом и образцом. Это может быть как оталкивание, так и притяжение. В случае отталкивания возможна ситуация, когда подвод кантилевера прекращается до касания с образцом. В этом случае можно увеличить силу прижима при повторном подводе, либо оставить прибор на некоторое время (часы) для статического электричества
Ван-дер-Ваальсово притяжение, капиллярные, электростатические силы, силы отталкивания в области касания иглы с поверхностью образца и силы, действующие на иглу со стороны деформированного кантилевера, в равновесии должны компенсировать друг друга. В месте касания острия иглы с поверхностью возникают заметные деформации как острия иглы, так и образца. Избежать деформаций можно при силах порядка 10-11 Н, но это возможно лишь при работе в жидкости.
2.2.2.2 Топография поверхности (режим постоянной силы)
Измерение рельефа поверхности с поддержанием постоянной силы воздействия иглы кантилевера на поверхность образца является основой для измерения локальной жесткости поверхности, локальной вязкости и локальной силы трения.
Рассмотрим подробнее оптическую схему измерения угла отклонения зонда (Рис,11). Излучение полупроводникового лазера с длиной волны 650-б70нм фокусируется объективом в эллиптическое пятно размером ~50 мкм на отражающей поверхности кантилевера. Отраженный луч попадает на четырехсекционный фотодиод. Вертикальное отклонение регистрируется по разностному сигналу (А+С) - (В+D) (Рис. 6). Боковые силы вызывают крутильную деформацию кантилевера отраженный луч смещается в перпендикулярном направлении. Боковое отклонение регистрируется по разностному сигналу (А+В) - (В+D)
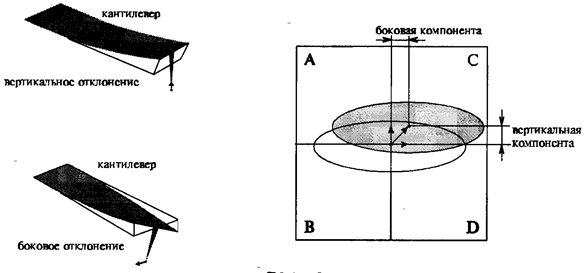
(Рис.6)
Функциональная схема работы АСМ в режиме поддержания постоянной силы может быть описана следующим образом:
Разностный сигнал с регистрирующей системы усиливается и подается на интегратор. При отклонении от заданного значения он воспринимается как сигнал ошибки и интегрируется, что обеспечивает правильную отработку системой постоянного смещения пьезодвижителя. Сигнал с интегратора подается на высоковольтный усилитель, а с него на пьезодвижитель, что компенсирует возникшую ошибку. Обратная связь поддерживает сигнал рассогласования вблизи заданного уровня. Напряжение с интегратора подается на усилитель с регулируемым коэффициентом усиления, поскольку необходимо обеспечить разную чувствительность измерительной части прибора при работе с атомарным разрешением и на образцах с грубым рельефом. Затем сигнал подается на аналого-цифровой преобразователь, а оттуда через интерфейсную плату записывается в память компьютера и интерпретируется как рельеф образца. Сила прижима кантилевера к образцу выставляется при начальной юстировке фотодиода. Дополнительный блок установки смещения обеспечивает возможность изменения силы прижима в подведенном положении. При этом обратная связь обеспечивает поддержание разностного сигнала. Дистанционная регулировка силы увеличивает удобство работы с прибором. (При отклонении разностного сигнала от нуля начинают проявляться шумы интенсивности лазера. Поэтому нужно осторожно применять электронную регулировку силы на образцах с малым рельефом, например, при достижении атомарного разрешения
Точность работы применяемой здесь интегральной обратной связи зависит от петлевого коэффициента усиления. Достижение максимальных скоростей сканирования требует быстрой работы обратной связи. Для увеличения скорости отработки обратной связью сигнала ошибки выгодно ставить максимальный коэффициент петлевого усиления. Но при слишком большом коэффициенте усиления может быть достигнут порог генерации. Работа вблизи порога генерации характеризуется большими переколебаниями и поэтому точность падает. С друюи стороны при слишком малых коэффициентах усиления обратная связь не успевает отслеживать резкие изменения рельефа, что также снижает точность измерений. Поэтому существует оптимальный коэффициент усиления для каждой системы зонд-образец, который обеспечивает максимальную точность работы обратной связи и достоверность данных.
На петлевой коэффициент усиления влияет несколько причин. В зависимости от применяемого кантилевера при прочих равных параметрах он может изменяться в несколько раз. Коэффициент усиления изменяется обратно пропорционально длине кантилевера, и следовательно, чем кантилевер короче, тем выше коэффициент передачи. Кроме того, коэффициент усиления может заметно изменяться в зависимости от юстировки кантилевера. Оператор может контролировать петлевой коэффициент усиления регулировкой усилителя с изменяемым коэффициентом усиления в интеграторе.
При больших значениях петлевого усиления генерация возникает на частотах первого резонанса пьезосканера. Для сканера с полем 11х11 мкм2- примерно 10 кГц, с полем 25Х25 мкм2 около 7,5 кГц. Частота генерации зависит от массы образца. Для устранения генерации достаточно уменьшить коэффициент усиления регулируемого усилителя. При этом амплитуда автоколебаний будет уменьшаться без изменения частоты.
При наличии большого трения между образцом и иглой также может возникать другой вид генерации.
Для него характерно, что при уменьшении коэффициента усиления в петле обратной связи, частота уменьшается без изменения амплитуды, причем может достигать долей герца, но тем не менее генерация всегда присутствует. Избежать этого вида генерации можно уменьшением силы трения за счет уменьшения силы взаимодействия или использованием коротких кантилеверов. При сканировании амплитуда генерации значительно падает, поэтому во многих случаях ее присутствие практически не сказывается на качестве изображения.
На полученном в результате сканирования изображении могут присутствовать сбои, имеющие вид отдельных линий в направлении сканирования, отличающихся по высоте от общего рельефа. Они вызваны тем, что игла цепляется за неровности рельефа и затем проскальзывают по образцу или тем. что игла частично разрушает образец. Избежать таких сбоев можно подбором направления сканирования, уменьшением силы прижима, уменьшением скорости сканирования. Выбор направления сканирования в различных режимах связан с тем, что кантилевер по-разному ваимодействует с возникающими изменениями рельефа. При сканировании в положительном направлении (+Y) можно считать, что кантилевер движется снизу вверх относительно изображения поверхности на мониторе (на самом деле сканирование осуществляется образцом, который движется в обратном направлении). При этом он наезжает на препятствия пологим склоном иглы и при этом преодолевает их. При таком варианте сканирования сбои - срывы кантилевера возникают реже. Если же он наезжает на препятствия стороной под углом 75, то он значительно чаще цепляется за неровности и чаще возникают сбои на изображении. Вообще, в зависимости от образца необходимо подбирать направление сканирования. В части случаев оказывается выгодным сканировать на +Х или -X, например, при снятии изображения боковых сил. На изображении могут возникать характерные следы связанные с особенностями рельефа в направлении быстрого сканирования, обусловленные конечной скоростью работы обратной связи. Их величина зависит от скорости сканирования, петлевого коэффициента усиления, характера рельефа. Если во время сканирования регистрировать сигнал ошибки обратной связи, то эти отклонения будут хорошо видны. Получившееся изображение содержит практически всю потерянную при снятии топографии информацию. Используя результаты сканирования в режиме топо-графии и в режиме регистрации ошибки обратной связи, можно точнее восстанавливать топографию поверхности.
Похожие работы
... о всей поверхности, — в каждый момент времени мы имеем информацию только от участка непосредственно регистрируюемого зондом. Это не позволяет использовать in-situ методику. Атомно-силовая микроскопия позволяет получать информацию о поверхностном заряде, о поверхностной емкости, о поверхностной проводимости, о магнитных свойствах. Позволяет измерять эти параметры даже сквозь плёнку жидкости ...
... , подобных квантовым точкам, обещает большую точность и снижение стоимости путем использования методов производства, разработанных для полупроводниковой промышленности [2]. Приложения современных нанотехнологии в медицине Сегодня мы еще довольно далеки от описанного Фейнманом микроробота, способного через кровеносную систему проникнуть внутрь сердца и произвести там операцию на клапане. ...
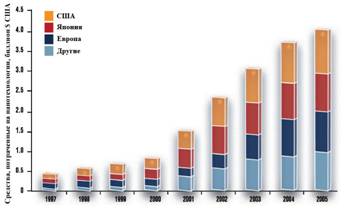
... перьев. Благодаря такому подходу, нанолитография глубокого пера стала универсальным инструментом для производства полупроводниковых компонентов со сложной структурой. Раздел II. Перспективы развития и проблемы. 3.1. Экономика и финансирование. Развитие нанотехнологий невозможно без самого современного научного оборудования (самая скромная нанолаборатория стоит не менее 10 млн. долларов). По ...

... полностью соответствовать модели новой экономической формации, где единственным предметом обмена станет информация. 2.3. Проблемы и перспективы развития нанотехнологий в машиностроении 2.3.1. Перспективы развития нанотехнологий в машиностроении Стратегическими национальными приоритетами Российской Федерации, изложенными в утвержденных 30 марта 2002 г. Президентом Российской Федерации « ...
0 комментариев