Навигация
1.3 Открывается.
1.4 Задерживается над тарой на 0,07 сек
1.5 ![]() Перемещается обратно к конвейеру, далее п.п. с 1.1 повторяются.
Перемещается обратно к конвейеру, далее п.п. с 1.1 повторяются.
2.По кнопке "СТОП" манипулятор останавливается.
3.При переполнении тары хотя бы одного типа деталей на контроллер передается команда соответственно "Сменить тару 1" или "Сменить тару 2", по этой команде манипулятор переходит в начальное состояние (т.е. срабатывают КВ начального положения всех кинематических пар), и останавливается. При смене тары оператор с пульта управления передает команду "Тара 1 сменена" или "Тара 2 сменена", по которой манипулятор повторяет действия с пункта1.
Управление работой манипулятора осуществляется с операторской панели. На панели помещены следующие кнопки и индикаторы выходных сигналов:
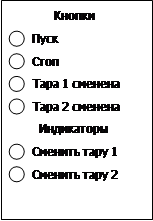
Рис.1
Манипулятор начинает работу, если нажата кнопка "ПУСК". При этом последовательно поступают команды на исполнительные механизмы и учитывают положение КВ. манипулятор перемещается по заданной траектории. При нажатии оператором кнопки "СТОП" манипулятор останавливается. При переполнении тары деталей 1 и 2 на панели обслуживания включается индикатор "Сменить тару 1" или "Сменить тару 2" соответственно, по этому сигналу манипулятор перемещается в начальное положение и ждет нажатия оператором кнопки "Тара 1 сменена" или "Тара 2 сменена" соответственно.
2.1 Представление кинематической схемы манипулятора
Кинематическая структура рабочих органов манипулятора имеет вид:
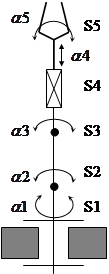
Манипулятор состоит из четырех кинематических пар: вращательной S1, изгибов S2 и S3, перемещения S4 и схвата S5.
При проектировании программы будем использовать данные 7 варианта:
| N вар | Траектория | Нач. положение |
|
| Кол-во деталей 1 | Кол-во деталей 2 |
| 7 | 2 | В | 0,7 | 0,07 | 11 | 19 |
Соответствующая траектория манипулятора представлена на рис. 3
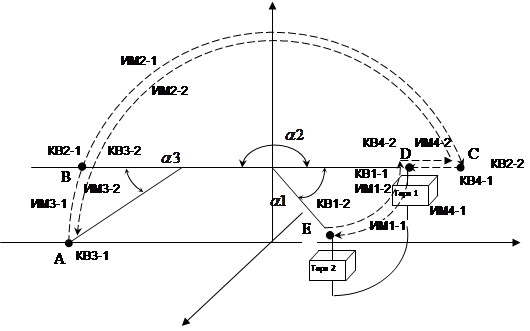
Рис. 3 Отрезок АВ – в перемещении участвует КП S3 (изгиб) Отрезок ВС – в перемещении участвует КП S2 (изгиб) Отрезок CD – в перемещении участвует КП S4 (перемещение) Отрезок DE – в перемещении участвует КП S1 (вращение) Любую n-ю КП манипулятора можно перемещать от конвейера к таре с помощью ИМn-1 и от тары к конвейеру с помощью ИМn-2. Два КВ отвечают за то, чтобы ИМ выключался, если КП достигла по траектории своего предельного положения (т.е. сигнал с КВn-2) и включался, если пришел сигнал, позволяющий начать перемещение и при этом КПn в начальном положении (т.е. сигнал с КВn-1).
3.Выбор программируемого контроллера 3.1 Выбор технических средств
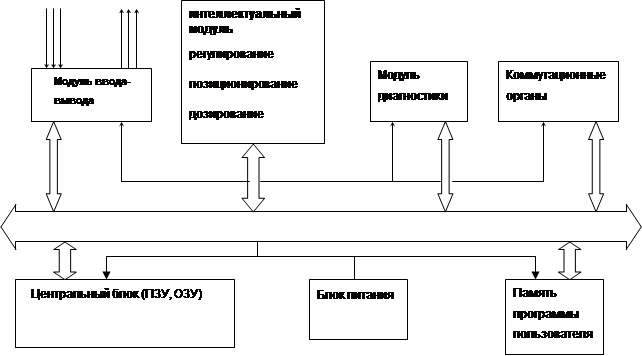
Программируемый контроллер S5-100U является модульным малым устройством управления для экономичных решений простых и средних задач автоматизации.
Программируемый контроллер S5-100U состоит из:
- центрального модуля
- шинных модулей
- периферийных модулей, которые крепятся на шинные модули
- блока питания
- модулей подключения
Центральные модули, шинные модули, блоки питания и модули подключения крепятся непосредственно на стандартную профильную шину.
Периферийные модули крепятся на стандартную профильную шину через шинные модули. На четырех стандартных профильных шинах можно разместить максимально 32 периферийных модуля.
Периферийными модулями являются:
- модуля цифрового ввода-вывода
- модуля аналогового ввода-вывода
- модули подключения датчиков и исполнительных устройств для работы во взрывоопасных помещениях
- модули предварительной обработки сигналов
- специальные модули внешних таймеров
- модули диагностики для контроля периферийной шины контроллера
- модули имитации для проверки программ
- интеллектуальные модули для быстропротекающих процессов предварительной обработки
3.2 Архитектура контроллера S5-100U
3.3 Технические характеристики контроллера S5-100U
Стандартная профильная шина
35-мм стандартная профильная шина служит для непосредственного крепления:
- центральных модулей
- блоков питания
- модулей подключения
- шинных модулей
Шины поставляются длиной от 483мм до 2м
Центральные модули
Необходимы при комплектации контроллера. Состоят из:
- управляющего блока
- внутреннего блока питания, предназначенного также для периферийных модулей. Максимальный выходной ток 1 А.
- Внутреннее ОЗУ для программ
- Разъем для подключения программатора или устройства обслуживания
- Разъем для блока питания (АС 115/230В, DC 24В)
- Разъемные линии шины для подключения первого шинного модуля
- Отсека буферной батареи для внутреннего ОЗУ для программ
Для моего случая выберем CPU 102 со следующими характеристиками:
| Функции | Двоичные операции, скобочные операции, запись в память, вычисления, специальные функции и т.д. |
| ОЗУ для программ | 4 кб |
| Модуль памяти | 4 кб |
| Время обработки для 1024 двоичных операций | 7 мс |
| Таймеры 0.01-9990 сек | 32 |
| Меркеры | 1024, из них 8 реманентных |
| счетчики | 32, из них 8 реманентных |
| Адресуемые цифровые входы/выходы | 448 |
| Адресуемые аналоговые входы/выходы | 16 |
| Конструктивные возможности | До 4 рядов, макс. 32 периферийных модуля |
| Возможности сопряжения | SINEC L1 |
| программирование | STEP 5 |
Выберем PS 931, имеющий следующие характеристики:
| Входное напряжение | АС 115/230В |
| Выходной ток, при 24 В | 2А |
| Разделение по потенциалу | + |
| Сохранение питания при отключении сети | 20 мс |
| Защита от короткого замыкания | электронная |
| Класс защиты | 1 |
Принцип измерения длины деталей (деталь А длиннее детали В) основан на следующем принципе:
С одной стороны конвейера помещены два источника оптических излучений, а с другой стороны конвейера – два приемника этих излучений. Деталь типа В перекрывает два источника излучений, а деталь типа А – один источник.
В качестве источника излучения можно выбрать люминесцентный индикатор. Его высвечивание может осуществляться либо электрическим полем, прикладываемым к электролюминесцентному конденсатору, либо током, протекающим через люминофор. Люминесцентный конденсатор состоит из подложки, на которую наносится проводящий слой (электрод), слоя люминофора, защитного слоя и второго электрода. Если выход света осуществляется со стороны подложки, то она выполняется прозрачной.
В качестве приемника излучения выберем фоторезистор. Чувствительный элемент в фоторезисторе выполнен в виде пластинки, на которую нанесен слой полупроводникового фоточувствительного материала. Электропроводность полупроводниковых материалов обусловлена возбуждением электронов в валентной зоне и примесных уровнях.
При небольших уровнях освещенности преобразователя число возбужденных светом электронов пропорционально освещенности. Его электрическая проводимость ![]() , где
, где ![]() - фототок,
- фототок, ![]() - напряжение, приложенное к преобразователю, также пропорционально освещенности.
- напряжение, приложенное к преобразователю, также пропорционально освещенности.
При больших освещенностях пропорциональность нарушается.
Вольт-амперная характеристика фоторезисторов линейна, то есть их сопротивление не зависит от приложенного напряжения. Фоторезисторы имеют высокую чувствительность, но их сопротивление зависит от температуры. Для уменьшения температурной погрешности они включаются в смежные плечи моста.
4. Разработка и написание программы управления 4.1. Разработка структуры системы управления
Для управления работой манипулятора следует подавать в определенной последовательности сигналы на ИМ1-1, ИМ1-2, ИМ2-1, ИМ2-2, ИМ3-1, ИМ3-2, ИМ4-1, ИМ4-2, ИМ5-1, ИМ5-2 и учитывать выходные сигналы с КВ1-1, КВ1-2, КВ2-1, КВ2-2, КВ3-1, КВ3-2, КВ4-1, КВ4-2. Исходя из всего вышесказанного, можно получить следующую общую схему системы управления:
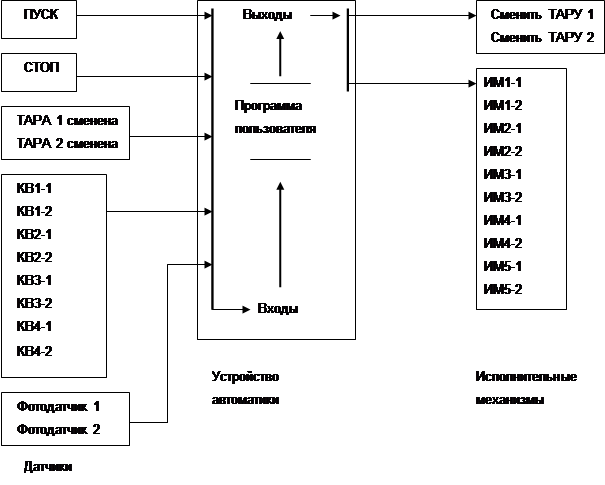
Входы "Фотодатчик 1" и "Фотодатчик 2" служат для распознания типа детали.
Технический процесс работы манипулятора и всей линии в целом проходит под управлением устройства автоматики в соответствии с командами программы пользователя. С помощью этой программы устройство автоматики обрабатывает сигналы, поступающие на входы от датчиков процесса. Результат обработки сигналов далее выдается через выходы на управляющие процессом механизмы.
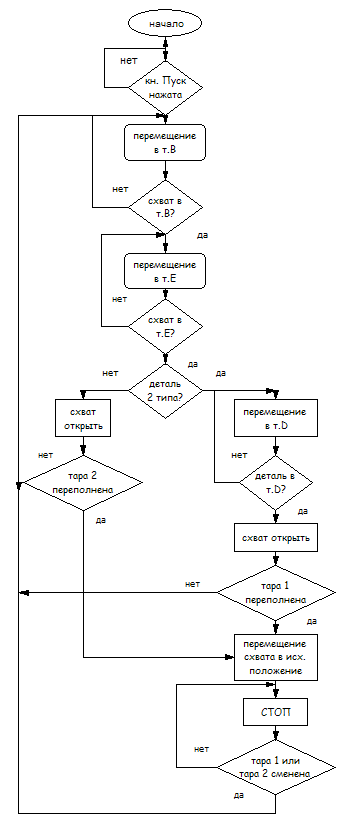
4.2 Функциональная блок-схема алгоритма управления промышленным роботом
Для составления программы управления роботом составим концептуальную блок-схему алгоритма управления:
Для того, чтобы наше устройство автоматики работало с вышеперечисленными в п.4.1 входами и выходами, присвоим им в левом столбце адреса:
| E32.0 | KB1-1 | датчики |
| E32.1 | KB1-2 | |
| E32.2 | KB2-1 | |
| E32.3 | KB2-2 | |
| E32.4 | KB3-1 | |
| E32.5 | KB3-2 | |
| E32.6 | KB4-1 | |
| E32.7 | KB4-2 | |
| E33.0 | Фотодатчик 1 | |
| E33.1 | Фотодатчик 1 | |
| E33.2 | Тара 1 сменена | |
| E33.3 | Тара 2 сменена | |
| E33.4 | Кнопка "СТОП" | |
| E33.5 | Кнопка "ПУСК" | |
| A32.0 | ИМ1-1 | Исполнительные механизмы |
| A32.1 | ИМ1-2 | |
| A32.2 | ИМ2-1 | |
| A32.3 | ИМ2-2 | |
| A32.4 | ИМ3-1 | |
| A32.5 | ИМ3-2 | |
| A32.6 | ИМ4-1 | |
| A32.7 | ИМ4-2 | |
| A33.0 | ИМ5-1"СХВАТ ЗАКРЫТ" | |
| A33.1 | ИМ5-2"СХВАТ ОТКРЫТ" | |
| A33.2 | "СМЕНИТЬ ТАРУ 1" | |
| A33.2 | "СМЕНИТЬ ТАРУ 2" |
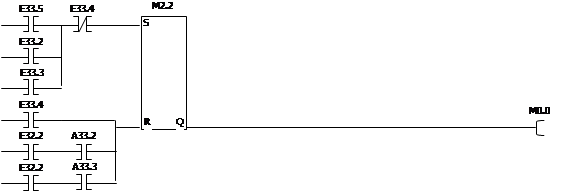
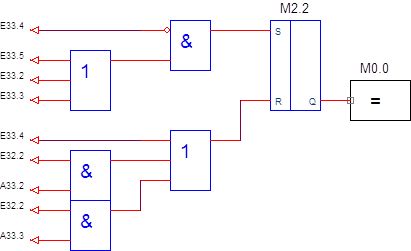
4.4 Алгоритмическое представление программы 4.4.1 Алгоритм включения меркера М0.0 (сегмент 1)
ЕСЛИ нажата кнопка "ПУСК" (Е33.5 сигнал 1)
ИЛИ нажата кнопка "Тара 1 сменена" (Е33.2 сигнал 1)
ИЛИ нажата кнопка "Тара 2 сменена" (Е33.3 сигнал 1)
И-НЕ нажата кнопка "СТОП" (Е33.4 сигнал 0)
ТОГДА взводится триггер (S/R) (М2.2 S=1)
И включается меркер М0.0 (М0.0 сигнал 1)
ЕСЛИ нажата кнопка "СТОП" (Е33.4 сигнал 1)
ИЛИ сработал КВ2-1 (Е32.2 сигнал 1)
И включен "Переполнение тары 1" (А33.2 сигнал 1)
ИЛИ сработал КВ2-1 (Е32.2 сигнал 1)
И включен "Переполнение Тары 2" (А33.3. сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.2 R=1)
И включается меркер М0.0 (М0.0 сигнал 0)
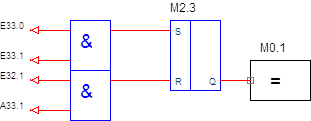
4.4.2 Алгоритм включения меркера М0.1 (сегмент 2)ЕСЛИ сработал "фотодатчик 1" (Е33.0 сигнал 1)
И сработал "фотодатчик 2" (Е33.1 сигнал 1)
ТОГДА взводится триггер (S/R) (М2.3 S=1)
И включается меркер М0.1 (М0.1 сигнал 1)
ЕСЛИ сработал КВ1-2 (Е32.1 сигнал 1)
И "Схват открыт" (А33.1 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (М2.3 R=1)
И выключается меркер М0.1 (М0.1 сигнал 1)
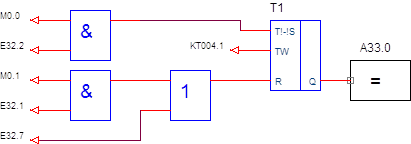
4.4.3 Алгоритм включения "Схват закрыт" (сегмент 3)ЕСЛИ включен меркер М0.0 (М0.0 сигнал 1)
И сработал КВ2-1 (Е32.2 сигнал 1)
ТОГДА включить таймер (SS) (Т1: Т!-!S)
И через время t=0,7 сек (КТ0007.2) включится "Схват закрыт" (А33.0 сигнал1 )
ЕСЛИ сработал КВ4-2 (Е32.7 сигнал 1)
ИЛИ включен меркер М0.1 (М0.1 сигнал 1)
И сработал КВ1-2 (Е32.1 сигнал 1)
ТОГДА сбросить таймер (SS) (Т1: R=1)
И выключится "Схват закрыт" (А33.0 сигнал 0)
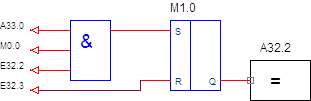
4.4.4 Алгоритм включения ИМ2-1 (сегмент 4)ЕСЛИ "Схват закрыт" (А33.0 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
И сработал КВ2-1 (Е32.2 сигнал 1)
ТОГДА взводится триггер (S/R) (М1.0 S=1)
И включается ИМ2-1 (А32.2 сигнал 1)
ЕСЛИ сработал КВ2-2 (Е32.3 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (М1.0 R=1)
И выключается ИМ2-1 (А32.2 сигнал 0)
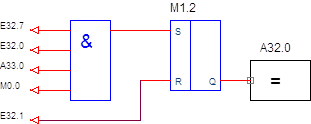
4.4.5 Алгоритм включения ИМ1-1 (сегмент 5)ЕСЛИ сработал КВ4-2 (Е32.7 сигнал 1)
И сработал КВ1-1 (Е32.0 сигнал 1)
И "Схват закрыт" (А33.0 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.2 S=1)
И включается ИМ1-1 (А32.0 сигнал 1)
ЕСЛИ включен КВ1-2 (Е32.1 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M1.1 R=1)
И выключается ИМ1-1 (А32.0 сигнал 0)
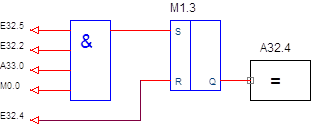
4.4.6 Алгоритм включения ИМ3-1 (сегмент 6)ЕСЛИ включен КВ3-2 (Е32.5 сигнал 1)
И включен КВ2-1 (Е32.2 сигнал 1)
И "Схват закрыт" (А33.0 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.3 S=1)
И включаем ИМ3-1 (А32.4 сигнал 1)
ЕСЛИ включен КВ3-1 (Е32.4 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M1.3 R=1)
И выключаем ИМ3-1 (А32.4 сигнал 0)
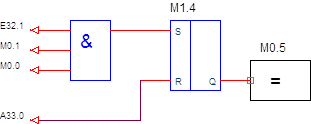
4.4.7 Алгоритм включения меркера М0.5 (сегмент 7)ЕСЛИ включен КВ1-2 (Е32.1 сигнал 1)
И включен меркер М0.1 (М0.1 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.4 R=1)
И выключаем меркер М0.5 (сигнал 0)
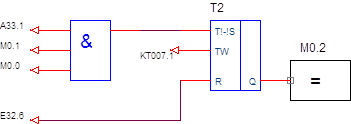
4.4.8 Алгоритм включения меркера М0.2 (сегмент 8)ЕСЛИ "Схват открыт" (А33.1 сигнал 1)
И включен меркер М0.1 (М0.1 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА включается таймер (SS) (T2: T!-!S=1)
И через время t=0,07 сек (КТ00007.2) включится меркер М0.2
ЕСЛИ включен КВ4-1 (Е32.6 сигнал 1)
ТОГДА сбрасывается таймер (SS) (Т2: R=1)
ИЛИ включается меркер М0.2 (М0.2 сигнал 0)
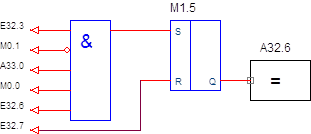
4.4.9 Алгоритм включения ИМ4-1 (сегмент 9)ЕСЛИ сработал КВ2-2 (Е32.3 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И включен меркер М0.0 (М0.0 сигнал 1)
И "Схват закрыт" (А33.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.5 S=1)
И включается ИМ4-1 (А32.6 сигнал 1)
ЕСЛИ сработал КВ4-2 (Е32.7 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M1.5 R=1)
И выключаем ИМ4-1 (А32.6 сигнал 0)
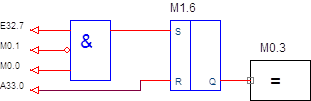
4.4.10 Алгоритм включения меркера М0.3 (сегмент 10)ЕСЛИ включен КВ4-2 (Е32.7 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.6 S=1)
И включаем меркер М0.3 (М0.3 сигнал 1)
ЕСЛИ "Схват закрыт" (А33.0 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M1.6 R=1)
И выключаем меркер М0.3 (М0.3 сигнал 0)
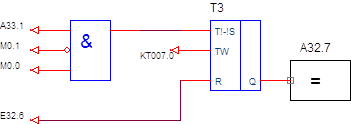
4.4.11 Алгоритм включения ИМ4-2 (сегмент 11)ЕСЛИ "Схват закрыт" (А33.1 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА включается таймер (SS) (T3: T!-!S=1)
И через время t=0,07 сек (КТ00007.2) включается ИМ4-2 (А32.7 сигнал 1)
ЕСЛИ сработал КВ4-1 (Е32.6 сигнал 1)
ТОГДА сбросить таймер (SS) (Т2: R=1)
И выключаем ИМ4-2 (А32.7 сигнал 0)
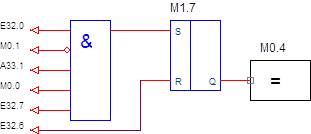
4.4.12 Алгоритм включения меркера М0.4 (сегмент 12)ЕСЛИ включен КВ1-1 (Е32.0 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И "Схват открыт" (А33.1 сигнал 1)
И сработал КВ4-2 (Е32.7 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M1.7 S=1)
И включаем меркер М0.4 (М0.4 сигнал1)
ЕСЛИ сработал КВ4-1 (Е32.6 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M1.7 R=1)
И выключаем меркер М0.4 (М0.4 сигнал 0)
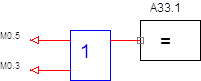
4.4.13 Алгоритм срабатывания "Схват открыть" (сегмент 13)ЕСЛИ включен меркер М0.5 (М0.5 сигнал 1)
ИЛИ включен меркер М0.3 (М0.3 сигнал 1)
ТОГДА включается "Схват открыть" (А33.1 сигнал 1)
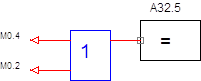
4.4.14 Алгоритм включения ИМ3-2 (сегмент 14)ЕСЛИ включен меркер М0.4 (М0.4 сигнал 1)
И включен меркер М0.2 (М0.2 сигнал 1)
ТОГДА включается ИМ3-2 (А32.5 сигнал 1)
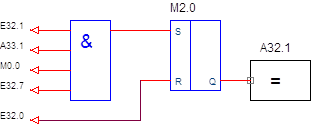
4.4.15 Алгоритм включения ИМ1-2 (сегмент 15)ЕСЛИ сработал КВ1-2 (Е32.1 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
И "Схват открыт" (А33.1 сигнал 1)
ТОГДА взводится триггер (S/R) (M2.0 S=1)
И включается ИМ1-2 (А32.1 сигнал 1)
ЕСЛИ сработал КВ1-1 (Е32.0 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.0 R=1)
И выключается ИМ1-2 (А32.1 сигнал 0)
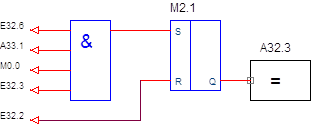
4.4.16 Алгоритм включения ИМ2-2 (сегмент 16)ЕСЛИ сработал КВ4-1 (Е32.6 сигнал 1)
И сработал КВ2-2 (Е32.3 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M2.1 S=1)
И включается ИМ2-2 (А32.3 сигнал 1)
ЕСЛИ сработал КВ3-1 (Е32.2 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.1 R=1)
И выключается ИМ2-2 (А32.3 сигнал 0)
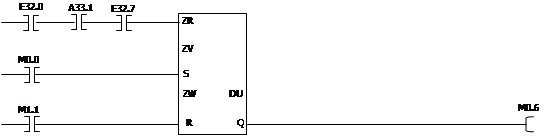
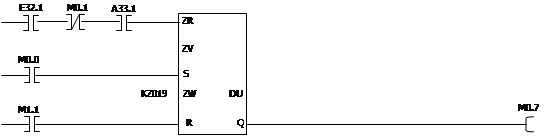
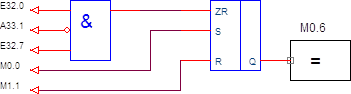
4.4.17 Алгоритм включения меркера М0.6 (сегмент 17)ЕСЛИ сработал КВ1-1 (Е32-0 сигнал 1)
И сработал КВ4-2 (Е32.7 сигнал 1)
И "Схват открыт" (А33.1 сигнал 1)
ТОГДА срабатывает счетчик (ZR) (Z1:ZR=1)
И уменьшает свое состояние на 1
ПОКА счетчик не в нуле (Z1:Q=1)
ЕСЛИ включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА счетчик устанавливается в состояние 1 (KZ 001)
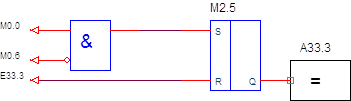
4.4.18 Алгоритм включения "Переполнения тары 2" (сегмент 18)ЕСЛИ НЕ включен меркер М0.6 (М0.6 сигнал 0)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M2.5 S=1)
И включаем "Переполнение тары 2" (А33.3 сигнал 1)
ЕСЛИ нажата кнопка "Тара 2 сменена" (Е33.3 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.5 R=1)
И выключаем " Переполнение тары 2" (А33.3 сигнал 0)
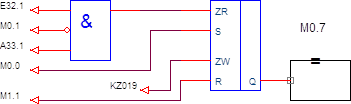
4.4.19 Алгоритм включения меркера М0.7 (сегмент 19)ЕСЛИ сработал КВ1-2 (Е32.1 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И "Схват открыт" (А33.1 сигнал 1)
ТОГДА срабатывает счетчик (ZR) (Z2:ZR=1)
И уменьшает свое состояние на 1
ПОКА счетчик не в нуле (Z2:Q=1)
ТОГДА включается меркер М0.7 (М0.7 сигнал 1)
ЕСЛИ включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА счетчик устанавливается в состояние 1 (KZ 001)
ЕСЛИ включен меркер М1.1 (М1.1 сигнал 1)
ТОГДА сбрасывается счетчик Z2(ZR) (Z2:R=1)
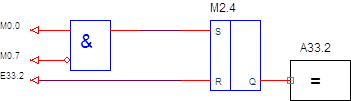
4.4.20 Алгоритм включения "Сменить тару 1" (сегмент 20)ЕСЛИ НЕ включен меркер М0.7 (М0.7 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M2.4 S=1)
И включаем "Сменить тару 1" (А33.2 сигнал 1)
ЕСЛИ нажата кнопка "Тара 1 сменена" (Е33.2 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.4 R=1)
И выключаем "Сменить тару 1" (А33.2 сигнал 0)
4.5 Представление программы управления роботом-манипулятором в релейно-контактном видеСегмент 1
|

|
|
|

|
|
|
|

|

Сегмент 6

Сегмент 7

|
 | |||
| |||
Сегмент 9

![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
|
|
![]()
|
|
|
|
|
|

Сегмент 12

![]()
Сегмент 13

Сегмент 14

Сегмент 15

Сегмент 16

Сегмент 17
Сегмент 18

Сегмент 19
Сегмент 20

4.6 Представление программы управления роботом-манипулятором в виде функциональной схемы
Сегмент 1
Сегмент 2
Сегмент 3
Сегмент 4
Сегмент 5
Сегмент 6
Сегмент 7
Сегмент 8
Сегмент 9
Сегмент 10
Сегмент 11
Сегмент 12
Сегмент 13
Сегмент 14
Сегмент 15
Сегмент 16
Сегмент 17
Сегмент 18
Сегмент 19
Сегмент 20
4.7 Представление программы управления роботом-манипулятором в виде последовательности команд
Сегмент 1
:UN E33.4
:U (
:O E33.5
:O E33.2
:O E33.3
:)
:S M2.2
:O(
:O E33.4
:O(
:U E32.2
:U A33.2
:)
:O(
:U E32.2
:U A33.3
:)
:)
:R M2.2
:=M0.0
Сегмент 2
:U E33.0
:U E33.1
:S M2.3
:U E32.1
:U A33.1
:R M2.3
:=M0.1
Сегмент 3
:U M0.0
:U E32.2
:SI T1
:L KT 007.1
:O E32.7
:O(
:U M0.1
:U E32.1
:)
: R T1
:UT1
:=A33.0
Сегмент 4
:U A33.0
:U M0.0
:U E32.2
:S M1.0
:U E32.3
:R M1.0
:=A32.2
Сегмент 5
:U E32.7
:U E32.0
:U A33.0
:U M0.0
:S M1.2
:U E32.1
:R M1.2
:=A32.0
Сегмент 6
:U E32.5
:U E32.2
:U A33.0
:U M0.0
:S M1.3
:U E32.4
:R M1.3
:=A32.4
Сегмент 7
:U E32.1
:U M0.1
:U M0.0
:S M1.4
:U A33.0
:R M1.4
:=M0.5
Сегмент 8
:U A33.1
:U M0.1
:U M0.0
:SI T2
:L KT 007.1
:U E32.6
: R T2
:UT2
:=M0.2
Сегмент 9
:U E32.3
:UN M0.1
:U A33.0
:U M0.0
:U E32.6
:S M1.5
:U E32.7
:R M1.5
:=A32.6
Сегмент 10
:U E32.7
:UN M0.1
:U M0.0
:S M1.6
:U A33.0
:R M1.6
:=M0.3
Сегмент 11
:U A33.1
:U M0.1
:U M0.0
:SI T3
:L KT 007.0
:U E32.6
:R T3
:UT3
:=A32.7
Сегмент 12
:U E32.2
:UN M0.1
:U A33.1
:U M0.0
:U E32.7
:S M1.7
:U E32.6
:R M1.7
:=M0.4
Сегмент 13
:O M0.5
:O M0.3
:=A33.1
Сегмент 14
:O M0.4
:O M0.2
:=A32.5
Сегмент 15
:U E32.1
:U A33.1
:U M0.0
:U E32.7
:S M2.0
:U E32.0
:R M2.0
:=A32.1
Сегмент 16
:U E32.6
:U A33.1
:U M0.0
:U E32.3
:S M2.1
:U E32.2
:R M2.1
:=A32.3
Сегмент 17
:U E32.0
:UN A33.1
:U E32.7
:ZR Z1
:NOP 0
:U M0.0
:L KZ 011
:S Z1
:U M1.1
:R Z1
:UZ
:=M0.6
Сегмент 18
:U M0.0
:UN M0.6
:S M2.5
:U E33.3
:R M2.5
:=A33.3
Сегмент 19
:U E32.1
:UN M0.1
:U A33.1
:ZR Z1
:NOP 0
:U M0.0
:L KZ 019
:S Z1
:U M1.1
:R Z1
:UZ
:=M0.7
Сегмент 20
:U M0.0
:U N M0.7
:S M2.4
:U E33.2
:R M2.4
:=A33.2
5. Список литературы
1. Денисенко Т.А, Михайлов Е.П и др. "Методические указания к выполнению курсового проекта по курсу "Локальные системы автоматики", ОГПУ, 1997
2. Денисенко Т.А, Тихончук С.Т "Методические указания по применению контроллеров семейства SIMATIC S5", ОГПУ, 1998
0 комментариев