Навигация
Работа комбинированной автоматической системы управления
17867
знаков
2
таблицы
46
изображений
Содержание
1.Задание
2.Проведение
эксперимента
3.Индентификация
каналов методом
Симою и проверка
аппроксимации
4.Расчет
оптимальных
настроек регулятора
одноконтурной
системы
5.Расчет
оптимальных
настроек регулятора
каскадной
системы
6.Расчет
компенсирующего
устройства
7.Расчет
оптимальных
настроек регулятора
одноконтурной
системы реального
объекта
8.Расчет
оптимальных
настроек регулятора
каскадной
системы реального
объекта
9.Расчет
компенсирующего
устройства
реального
объекта
10.Анализ
переходных
процессов
11.Перечень
файлов
12.Список
программного
обеспечения
1.Задание
Исследовать
работу комбинированной
автоматической
системы управления
в целом и её
отдельных
контуров. Провести
расчет оптимальных
настроечных
параметров
регуляторов
САР и провести
реализацию
полученных
результатов
на реальном
объекте –
Ремиконт-120.
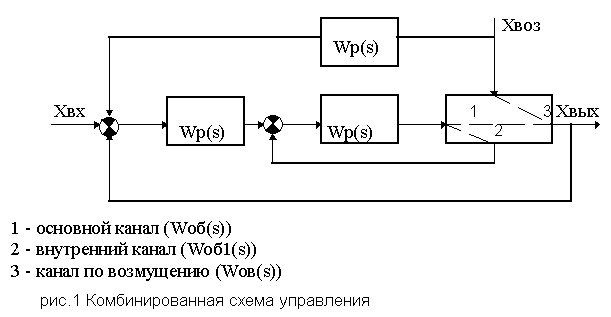
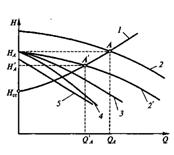
Комбинированная
система управления
1
– основной
канал (Wоб(S));
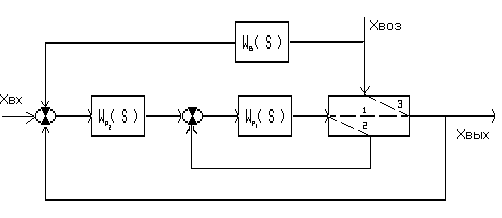
3 – канал по возмущению (Wов(S)).
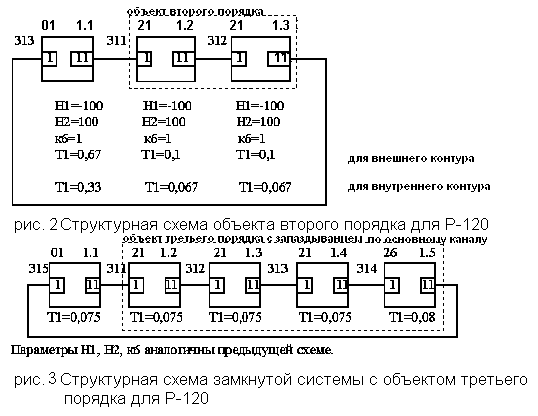
2.Проведение
эксперимента
Для
проведения
эксперимента
на Р-120 собираем
3 модели: по
основному
каналу, по
внутреннему
каналу и по
каналу возмущения.
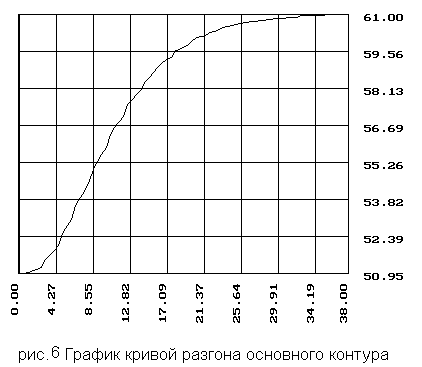
2.1 Проведение
эксперимента
по основному
каналу
Для снятия
кривой разгона
подаем на алгоблок
1.1 возмущающее
воздействие
амплитудой
10% и снимаем с
этого алгоблока
кривую разгона
.Заносим кривую
в файл VIT1.После
интерполяции
по 5 точкам и
нормирование
получаем кривую
разгона , представленную
в таблице /см.
табл. 2.1/

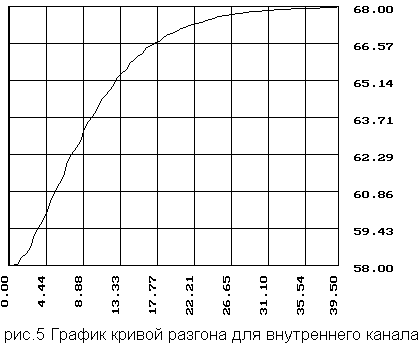
2.2 Проведение
эксперимента
по внутреннему
каналу

табл 2.2 Нормированная кривая разгона
2.3 Проведение
эксперимента
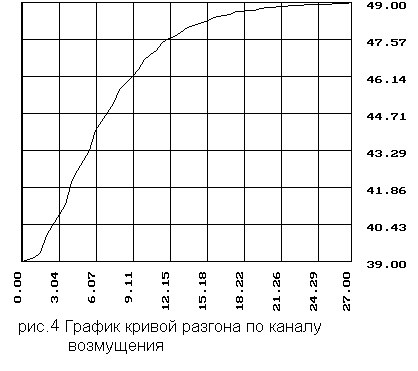
по каналу возмущения
Для снятия
кривой разгона
по каналу возмущения
проводим такие
же действия
,что и при снятии
первой кривой.
Полученную
кривую разгона
заносим в файл
VIT2.После
обработки
кривой результаты
заносим в таблицу
/см. табл. 2.3/
табл
2.3 Нормированная
кривая разгона

3.Идентификация каналов и методом Симою и проверка аппроксимацию
3.1 Основной
канал
В программе
ASR
по нормированной
кривой разгона
( исключая
запаздывание
) получим значения
площадей
:
F1=6.6627;
F2=14.5831;
F3=7.1130.
Т.о
передаточная
функция
объекта:W(s)об=1/14.583*s2+6.663*s+1
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим :
корни
характеристического
уравнения
:14.583*S2+6.663*S+1=0
S1=-0.228+j0.128
S2=-0.228-j0.128
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
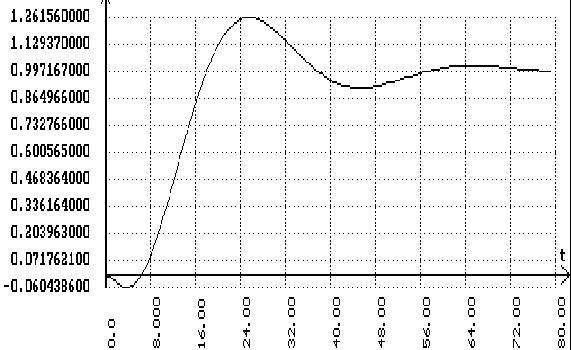
Переходной
процесс объекта
имеет вид
:
y(t)=1+2.046*cos(4.202-0.128*t)*e-0.228*t
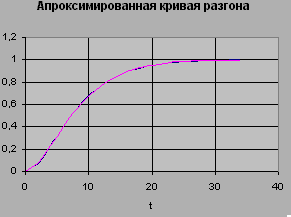
В
это уравнение
подставляем
значение t
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.1 Аппроксимированная
кривая разгона
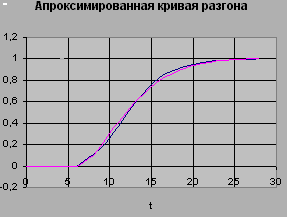
Сравнение
нормированной
кривой разгона
и полученного
переходного
процесса по
основному
каналу и будет
являться проверкой
аппроксимации
объекта
управления.
Расчетная
формула :
(h(t)-y(t))*100/h(y)
Максимальное
отклонение
составляет
(0.0533-0.0394)*100/0.0533=26%
Полная
передаточная
функция ( включая
звено чистого
запаздывания
) имеет вид:
W(s)об=1*e-6*s/14.583*s2+6.663*s+1
3.2 Внутренний
канал
В программе
ASR
по нормированной
кривой разгона
получим значения
площадей
F1=8.508;
F2=19.5765;
F3=0.4436.
Т.о
передаточная
функция объекта:
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим
:W(s)об1=1/19.576*s2+8.508*s+1
корни
характеристического
уравнения
:19.576*S2+8.508*S+1=0
S1=-0.21731+j0.06213
S2=-0.21731-j0.06213
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
Переходной
процесс объекта
имеет вид
:
y(t)=1+3.638*cos(4.434-0.062*t)*e-0.217*t
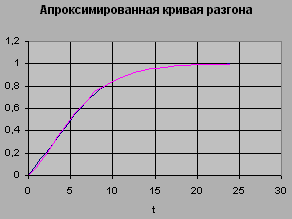
В
это уравнение
подставляем
значение t
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.2 Аппроксимированная
кривая разгона
При сравнении
кривых разгона
получаем максимальное
отклонение
:
(0.0345-0.0321)*100/0.0345=7%
3.3 Канал
по возмущению
В программе
ASR
по нормированной
кривой разгона
получим значения
площадей
F1=5.8678;
F2=8.1402
F3=-4.8742.
Составляем
систему уравнений:
a1=5.868+b1
a2=8.14+b1*5.688
0=-4,874+b1*8.14
Откуда
b1=0.599
, a1=6.467
, a2=11.655
Т.о
передаточная
функция
объекта:W(s)ов=0.599*s/11.655*s2+6.467*s+1
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим :
корни
характеристического
уравнения
:11.655*S2+6.467*S+1=0
S1=-0.27743+j0.09397
S2=-0.27743-j0.09397
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
Переходной
процесс объекта
имеет вид
:
y(t)=1+2.605*cos(4.318-0.094*t)*e-0.277*t
В
это уравнение
подставляем
значение t
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.2 Аппроксимированная
кривая разгона
При сравнении
кривых разгона
получаем максимальное
отклонение
:
(0.0966-0.0746)*100/0.0966=22.5%
4.Расчет
оптимальных
настроек регулятора
одноконтурной
системы
Важным
элементом
синтеза АСР
технологического
процесса является
расчет одноконтурной
системы регулирования
. При этом требуется
выбрать структуру
и найти числовые
значения параметров
регуляторов
. АСР образуется
при сочетании
объект регулирования
и регулятора
, и представляет
собой единую
динамическую
систему.
Расчет
настроек АСР
методом
Ротача.
Передаточная
функция объекта
по основному
каналу имеет
вид:
W(s)об=1*e-6*s/14.583*s2+6.663*s+1
В
программе
Linreg
производим
расчет оптимальных
настроечных
параметров
ПИ
регулятора:
Kп=0.51007;
Tи=5.32345;
wкр=0.14544.
Cмоделируем
в пакете SIAM
переходные
процессы
одноконтурной
системы по
управляющему
и по возмущающему
воздействию.
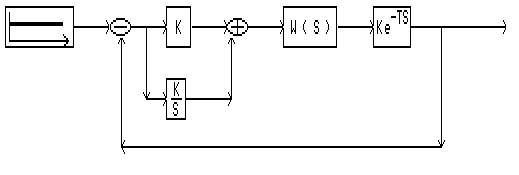
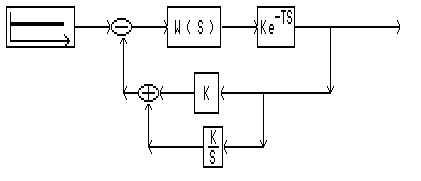
Структурная
схема одноконтурной
системы по
управляющему
воздействию
W(s)=1/(14.583*s2+6.663*s+1)
K=Kп=0.51007
K/S=Kп/Tи=0.0958
K=1,T=6
Переходной процесс
Перерегулирование – 26%
Время затухания – 65с
Степень затухания – 1
Структурная схема одноконтурной системы по возмущающему
воздействию
W(s)=1/(14.583*s2+6.663*s+1)
K=Kп=0.51007
K/S=Kп/Tи=0.0958
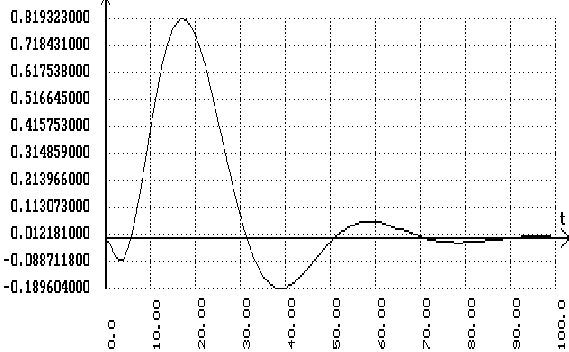
K=1,T=6
Перерегулирование – 82%
Время затухания – 65с
Степень затухания – 0.93
Похожие работы
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
... отличают от фактических, что говорит о достаточно не большой погрешности между фактическими и экспериментальными данными. Расчет одноконтурной АСР методом Роточа. В программе Linreg задаем параметры объекта. Выбираем в качестве регулятора ПИ- регулятор. И рассчитываем его настройки: а) для экспериментальной передаточной функции. В программе ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
0 комментариев