Навигация
Комбинированная система управления с подачей дополнительного воздействия на вход регулятора
17867
знаков
2
таблицы
46
изображений
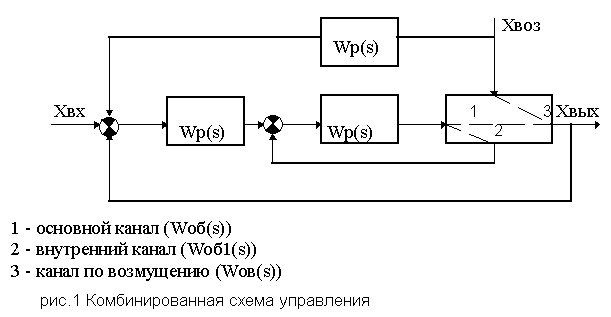
9.2 Комбинированная система управления с подачей дополнительного воздействия на вход регулятора
Определим
передаточную
функцию фильтра
согласно формуле
:
Wф(s)=Wов(s)/(Wоб(s)*Wр(s))
,
где Wов(s)
– передаточная
функция канала
по возмущению
,
Wоб(s)
- передаточная
функция объекта
,
Wр(s)
- передаточная
функция регулятора,
Находим
значения передаточной
функции фильтра
для нулевой
частоты
:
Aф(0)=Aов(0)/(Aоб(0)*Aр(0))=0 Fф(0)=Fов(0)-(Fоб(0)+Fр(0))=90
Находим
значения передаточной
функции фильтра
для резонансной
частоты
(w=0.14544):
Aф(w)=Aов(w)/(Aоб(w)*Aр(w))=0.769/(0.816*0.851)=1.13
Fф(w)=Fов(w)-(Fоб(w)+Fр(w))=-46-(-53+(-76))=83
В качестве компенсатора возмущения используем реальное дифференциальное звено : Wk(s)=Kв*Тв(s)/(Tв(s)+1)
Координаты
компенсатора
определяем
геометрически
.
Kв=ОД=7
Тв=(1/w)*sqrt(ОС/ДС)=1.018
Cмоделируем в пакете SIAM схему комбинированной системы c компенсатором .
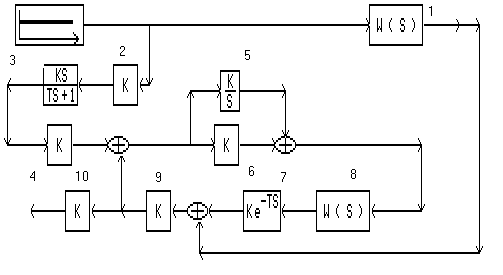
Структурная
схема комбинированной
системы с
компенсатором
1.W(s)=1/(9*s2+6*s+1)
2.К=7
3.К=1.018,Т=1.018
4.К=-1
5.K/S=Kп/Tи=0.0916
6.K=Kп=0.49
7.K=1,T=6
8.W(s)=1/(13.824*s3*17.28*s2+7.2*s+1)
9.К=-1
10.К=-1
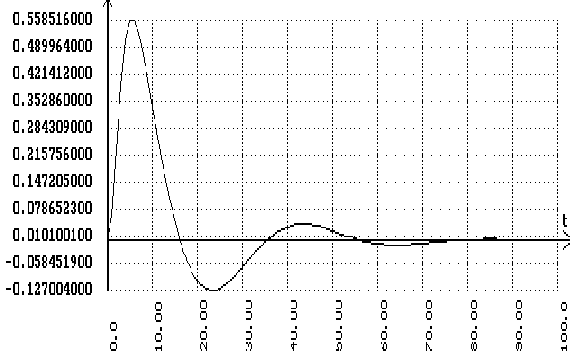
Переходной процесс
Перерегулирование – 56%
Время затухания – 70с
Степень затухания –0.93
10. Анализ переходных процессов
10.1 Анализ
переходных
процессов
модели
Для
того чтобы
сделать анализ
составляется
сводная таблица
переходных
процессов
| Cхема регулирования | по управлению | по возмущению | ||||
| перере- | время | степень | перере- | время | степень | |
| гулиров | регулир | регулир | гулиров | регулир | регулир | |
| одноконтурная | 26 | 65 | 1 | 82 | 65 | 0.93 |
| каскадная | 72 | 150 | 0.42 | 31 | 110 | 0.23 |
| комбинированная без компенсатора | 7 | 35 | 0.86 | |||
| комбинированная с компенсатором | 8 | 60 | 0.56 |
По данным полученным в результате расчетов можно сделать вывод , что лучше справляется с регулированием каскадная АСР без компенсатора возмущения .
10.2 Анализ переходных процессов реального обьекта
| Cхема регулирования | по управлению | по возмущению | ||||
| перере- | время | степень | перере- | время | степень | |
| гулиров | регулир | регулир | гулиров | регулир | регулир | |
| одноконтурная | 27 | 70 | 1 | 85 | 70 | 0.94 |
| каскадная | 57 | 150 | 0.9 | 30 | 120 | 0.23 |
| комбинированная без компенсатора | 87 | 65 | 0.95 | |||
| комбинированная с компенсатором | 56 | 70 | 0.93 |
По данным полученным в результате расчетов можно сделать вывод , что лучше справляется с регулированием каскадная АСР c компенсатором возмущения .
11. Перечень
файлов
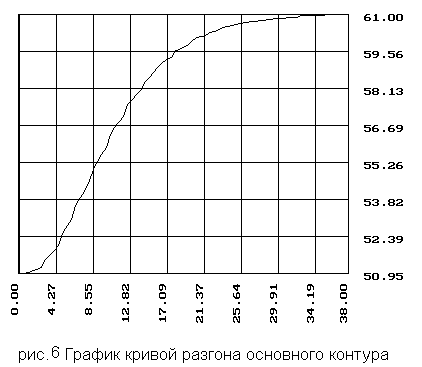
VIT1
– кривая разгона
по основному
каналу
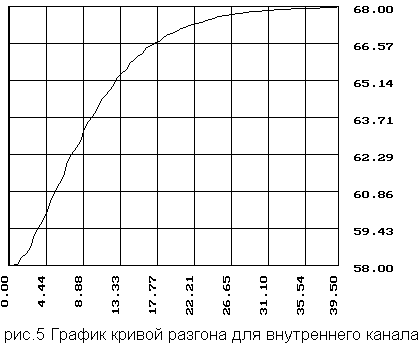
VIT2
- кривая разгона
по внутреннему
каналу
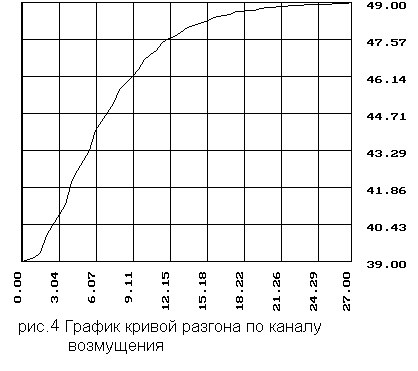
VIT3
- кривая разгона
по каналу
возмущения
VIT_1
- аппроксимированная
кривая разгона
по основному
каналу
VIT_2
- аппроксимированная
кривая разгона
по внутреннему
каналу
VIT_3
- аппроксимированная
кривая разгона
по каналу
возмущения
S_ODN_U
– структурная
схема одноконтурной
системы по
управлению
S_ODN_V
- структурная
схема одноконтурной
системы по
возмущению
S_VN_U
- структурная
схема внутреннего
канала по
управлению
S_VN_V
- структурная
схема внутреннего
канала по
возмущению
S_KAS_U
- структурная
схема каскадной
системы по
управлению
S_KAS_V
- структурная
схема каскадной
системы по
возмущению
S_KOM_NO
- структурная
схема комбинированной
системы по
управлению
S_KOM_R
- структурная
схема комбинированной
системы по
возмущению
12. Список
программного
обеспечения
1.ASR
2.LINREG
Похожие работы
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
... отличают от фактических, что говорит о достаточно не большой погрешности между фактическими и экспериментальными данными. Расчет одноконтурной АСР методом Роточа. В программе Linreg задаем параметры объекта. Выбираем в качестве регулятора ПИ- регулятор. И рассчитываем его настройки: а) для экспериментальной передаточной функции. В программе ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
0 комментариев