Навигация
Разработка системы телемеханики
33259
знаков
2
таблицы
0
изображений
ПЕНЗЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КАФЕДРА « А И Т»
КУРСОВОЙ ПРОЕКТ
на тему: «Разработка системы телемеханики»
по предмету: «Передача данных»
ВЫПОЛНИЛ СТУДЕНТ ГР. 963АС1
АТАЕВ А.С.
ПРИНЯЛ ПРЕПОДАВАТЕЛЬ
СТРОГАНОВ М.П.
ПЕНЗА
2000 Г.
1.Введение.
К характерным особенностям современной техники относится широкое внедрение методов и средств автоматики и телемеханики, вызванное переходом на автоматизированное управление. Непрерывно усложняются функции выполняемые системами автоматизированного управления, а относительная значимость этих систем в процессе производства непрерывно растет.
В основе любой технической системы управления лежат информационные процессы связанные с первичным отбором, сбором, предварительной обработкой информации, ее передачей, хранением, распределением, отображением, регистрацией, считыванием и исполнением команд управления.
С увеличением сложности системы, функции, выполняемые отдельными устройствами все более дифференцируются. Появляются специализированные устройства сбора, передачи, исполнения команд управления. Комплекс этих устройств с передачей информации на расстояние представляет собой систему телемеханики. С укрупнением систем управления и все большей автоматизацией процессов переработки информации системы телемеханики перерастают в крупные автоматизированные информационные системы. Развитие их идет по двум направлениям. Первое связано с постепенным усложнением систем телемеханики за счет как усложнения структур так и увеличения удельного веса процессов обработки информации, второе с внедрением вычислительной техники в управление производством.
2.Общие исходные данные.
1. Число управляемых и контролируемых объектов на каждом контролируемом пункте (КП) равно 10 а именно:
2 - для телеизмерения (ТИ)
3 – для телесигнализации (ТС)
5 – для телеуправления и телесигнализации (ТУ И ТС)
2. Система телемеханики может работать в режимах ТС, ТУ, ТИ.
Работа в любом режиме начинается с посылки пунктом управления (ПУ) кодовой комбинации общего адреса состоящего из адреса номера КП и адреса режима.3. Передача команд ТУ производится только по вызову. После вызова нужного КП телеуправление осуществляется пятью ключами выбора объектов и двумя ключами (кнопками) для включения или отключения объекта. Ключи выбора объектов и кнопки являются общими для всех КП.
4. Приём сигналов ТС и ТИ производятся или по вызову или путём циклического опроса. Одновременно сигналы ТС и ТИ не передаются.
5. Для приёма сигналов ТС предусмотрены сигнальные лампы, ключи квитирования (для ТУ-ТС) и общая кнопка квитирования (для ТС).
6. Для приёма сигналов ТИ по вызову предусматриваются два ключа вызова (общие для всех КП).
ТИ №1 – всегда воспроизводится в аналоговой форме;
ТИ №2 – всегда воспроизводится в цифровой форме.
7. Подключение каждого КП к ПУ при непрерывном циклическом опросе на нужное число циклов осуществляется с помощью счетчика и распределителя или счетчика и дешифратора.
8. При работе системы по вызову циклический опрос отменяется и происходит групповой вызов КП. Группы состоят из двух или трех КП.
9. При передаче сигналов ТУ в одном цикле с ПУ посылаются символы кодовой комбинации выбора объекта и характера операции.
10. При выполнении режимов ТС или режима ТИ передача осуществляется двумя разными кодами: адрес КП одним кодом, адрес режима другим.
11. Как при циклическом опросе так и при опросе по вызову система должна рабо тать во всех трех режимах.
Без вмешательства диспетчера система работает в режиме ТС с автоматическим циклическим опросом одного КП за другим. Диспетчер может перевести систему из режима ТС в режим ТИ при той же циклической работе системы.
При работе системы по вызову, диспетчер может вызвать любой КП в любое время и работать с ним в любом режиме столько времени, сколько сочтет нужным. Поэтому должны быть предусмотрены индивидуальные ключи или кнопки для того чтобы после вызова группы КП можно было поочередно подключать каждый КП.
12. Представление информации одного ТИ производится путем цифрового отсчета с помощью цифрового индикатора.
Представление информации второго ТИ осуществляется в аналоговой форме с использованием цифро-аналоговых преобразователей.
3. Индивидуальные исходные данные.
Число КП – 4
ТС осуществляется при помощи бесконтактной схемы светлого щита.
Синхронизация распределителей – циклическая.
Линия связи – цепочная.
Код адреса КП – инверсный.
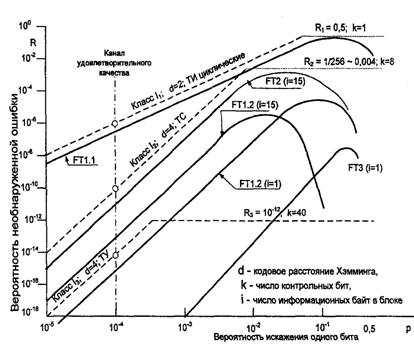
Код режима КП – Хемминга с исправлением одной ошибки.
Код для передачи сигнала ТУ – Хемминга.
Циклический код для передачи сообщений ТИ и ТС с КП и ПУ – код с обнаружением 2-х ошибок.
Погрешность телеизмерения – 1%
Тип аналого-цифрового преобразования для ТИ – в код Грея перемещением
Тип цифрового индикатора одного ТИ – с формированием цифр из элементов в процессе считывания.
Тип цифро-аналогового преобразования второго ТИ – с весовыми значениями резисторов для суммирования токов.
Похожие работы
... информации о количестве полученной потребителем или выработанной производителем тепловой энергии, температуре, давлении, объеме (массе) теплоносителя и о времени работы в открытых и закрытых водяных системах теплоснабжения при давлениях до 1,6 МПА (16 кгсм2) и температурах до +150 °С. Область применения - теплоэнергетика, системы коммерческого учета расхода горячей воды и тепловой энергии, ...
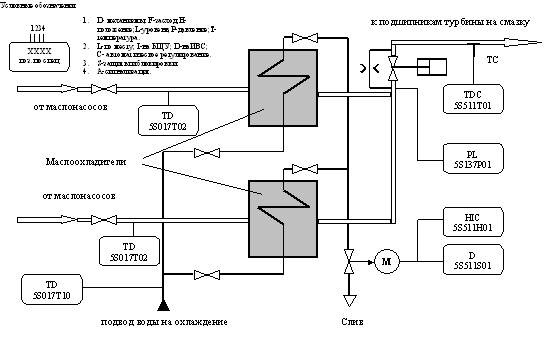
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
... путем замены программного обеспечения. В 1992 году был изготовлен первый в Беларуси комплекс телемеханики "Сириус", построенный на восьмиразрядных микропроцессорах. Часть программного обеспечения и конфигурация системы загружалась в память контроллеров с ПЭВМ. Современные программно-технические комплексы (например, ПТК АРКОНА, разработанный в 2001 году) строят также на основе микропроцессорных ...
... передачи Тц = 2,2 сек определяется расчетное значение частоты мультивибратора: , где k - коэффициент, учитывающий отношение периода колебаний мультивибратора передающего полукомплекта к периоду колебаний мультивибратора приемного полукомплекта k = 1. , так как при расчете мультивибратора, работающего совместно с триггером делителем частоты, расчетное значение его частоты удваивается и ...
0 комментариев