Навигация
4. Выбор и расчет кода.
Разработку системы телемеханики следует начинать с построения временной диаграммы, которая является графическим представлением временных соотношений между разными фазами работы системы.
Временная диаграмма позволяет оценить основные принципы построения системы и её работу в целом.
Данные полученные из временной диаграммы являются исходными для дальнейших расчётов, а также для построения структурных и функциональных схем системы.
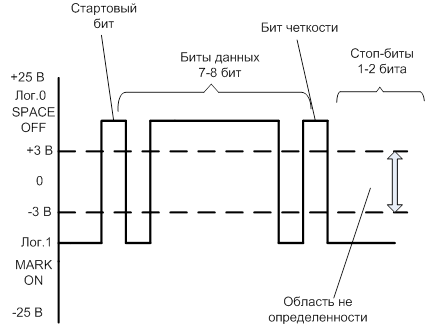
Временная диаграмма приведена на рис. 4. 1а. В начале работы системы, т.е. в начале цикла с пункта управления (ПУ) на все контролируемые пункты (КП) посылается синхрокомбинация (СК), которая синхронизирует и синфазирует работу распределителей на КП с распределителями на ПУ.
После этого следует посылка общего адреса, который предназначен для вызова необходимого КП, установления требуемого режима работы.
На рис. 4. 1б показаны тактовые импульсы, которые поступают с генератора импульсов на распределитель для его переключения. Длительность одного импульса и одной паузы, следующей за импульсом составляет одну временную позицию (t1, t2, t3, … tn). В данном случае длительность импульса равна длительности паузы.
Для определения длительности цикла в течении которого может быть передана и принята вся служебная и полезная информация необходимо определить число временных позиций (ВП), требуемых для передачи каждого сообщения.
Для обеспечения синхронной и синфазной работы в начале каждого цикла передается синхрокомбинация занимающая три временных позиции. Затем с ПУ на КП посылается общий адрес, причем в начале следует посылка кодовой комбинации для выбора требуемого КП. Так как число КП равно ![]() длина кодовой комбинации обычного двоичного кода не должна превышать трех разрядов. Например для вызова КП 1 посылается код 001, а для вызова КП 4 код 100.
длина кодовой комбинации обычного двоичного кода не должна превышать трех разрядов. Например для вызова КП 1 посылается код 001, а для вызова КП 4 код 100.
Так как комбинация должна пересылаться инверсным кодом, то длина комбинации составит шесть разрядов, т.к. в этом случае в линию посылается удвоенное число символов по сравнению с двоичным кодом, причем если в исходной комбинации четное число единиц, то добавляемая комбинация повторяет исходную, а если нечетное, то добавляемая комбинация инвертируется по отношению к основной. Таким образом, например, для вызова КП 1 в инверсном коде посылается комбинация 001110, а для вызова КП 3 – 011011.
Передача адреса режима защищается кодом Хемминга с исправлением одной ошибки. Используем для передачи адреса режима три двоичных разряда и в этом случае для формирования кода Хемминга необходимо добавить ещё три контрольных символа, таким образом общее число временных посылок будет 6.
Таким образом для передачи общего адреса необходимо 12 временных позиций, а всего для передачи служебной информации необходимо 15 временных позиций.
Для определения числа временных позиций необходимых для передачи полезной информации необходимо рассчитать, сколько требуется ВП для передачи каждого вида сообщений (ТУ, ТС, ТИ). Наибольшее число этих позиций и является искомым числом, т.к. в адресной системе телемеханики сообщения передаются поочередно.
Передача сигналов ТУ.
Для передачи сигналов ТУ для пяти объектов управления необходимо три разряда двоичного кода, а т.к.
передача ведется кодом Хемминга, то необходимо соответственно 6 разрядов. Две позиции отводятся для указания характера операции (включить/выключить), сигналы следуют после сигналов о выборе объектов ТУ (итого 8 ВП).
После посылки команды диспетчер должен получить известительную сигнализацию о выборе объекта. Известительная сигнализация ведется распределительным кодом: 1 лампочка – выбор объекта; 5 лампочек – сигнализация о переключении объектов. Итого это составляет 6 разрядов, что при защите кодом Хемминга составит еще 4 контрольных разряда, всего получается 10 разрядов.
Так как сигналы ТУ защищаются еще и разрешающей обратной связью, то необходимо отвести две временные позиции для сигналов «переспрос» и «продолжение». При их защите их кодом Хемминга число ВП возрастает на три контрольных разряда, итого до 5 ВП.
Общее число ВП необходимых для передачи сигналов ТУ составляет 23 ВП.
Передача сигналов ТИ.
Определяем количество разрядов необходимых для передачи сообщений ТИ с погрешностью 1%.
Так как код двоичный, то
![]()
2n=1/q=1/0,01=100
n=log2100=lg100/lg2=2/0,301=6,645
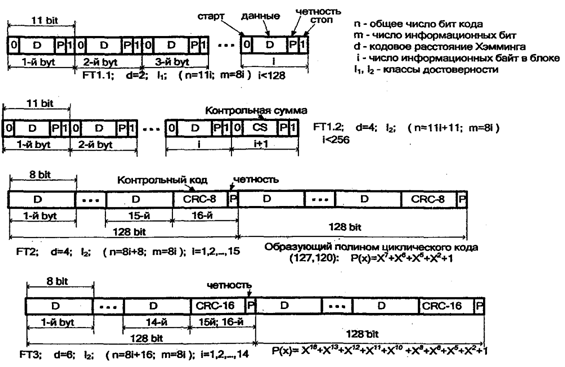
n принимаем равным 7, т.е. для передачи сообщений ТИ необходимо 7 ВП. Для передачи ТИ используется циклический код с обнаружением 2-х ошибок.
Для определения количества разрядов кода находим кодовое расстояние d:
d = r+1 = 2+1 = 3,
2 – число обнаруживаемых ошибок.
Отсюда необходимое число контрольных символов
![]() {log2[(n+1)+E”log2(n+1)]}
{log2[(n+1)+E”log2(n+1)]}
Символ Е’’ означает округление до целого большего числа
![]() {log2[(7+1)+E”log2(7+1)]}=E”2{log2[8+E”log28]}=7
{log2[(7+1)+E”log2(7+1)]}=E”2{log2[8+E”log28]}=7
Общее число ВП кода равно 14. Сообщения телесигнализации передаются на тех же ВП что и для передачи сигналов ТИ, для передачи будет использовано тоже кодирующее и декодирующее устройство. Таким образом передача сигналов ТУ требует наибольшего числа ВП и следовательно общее число ВП составляет 38, из них 15 отводится для передачи служебной информации и 23 – полезной информации.
5.Синтез структурной схемы.
Структурная схема ПУ приведена на рис 5.1.
Блок задания режимов работы (БРР) совместно с генератором тактовых импульсов (ГТИ) и распределителем тактовых импульсов (РИ) формирует все сигналы и синхронизирующие импульсы, преобразует коды и вырабатывает контрольные символы для кодовых комбинаций, передаваемых в КП, контролирует работоспособность аппаратуры. Команды, заданные на пульте диспетчера (ПД) через блок передачи сигналов ТУ (БПдТУ), БРР и линейный усилитель (ЛУ) выдаются в линию связи и далее поступают на КП. Сигналы телесигнализации поступающей от КП через линию связи и приемную часть
ЛУ поступают в блок приема телесигнализации (БПрТС) где обрабатываются, проверяются на отсутствие ошибок и далее передаются на ПД или щит сигнализации диспетчера. Сигналы телеинформации поступают в блок приема сигналов ТИ (БПрТИ) обрабатываются там код управлением сигналов с БРР и в зависимости от типов сигналов выдаются в цифро-аналоговый преобразователь (ЦАП) и далее на аналоговый указатель или в устройство отображения ТИ (УОТИ) и далее на цифровой индикатор.
Схема КП приведена на рис.5.2.
Информация поступающая из линии связи через ЛУ поступает в блок задания режимов работы (БРР) и генератор тактовых импульсов. ГТИ под управлением сигналов ПУ вырабатывает сигналы управления РИ. В БРР под действием сигналов РИ происходит обработка адресов и информации поступившей из линии связи. При совпадении поступившего адреса и адреса данного КП в зависимости от вида поступивших сигналов (ТУ, ТИ, ТС) в соответствующий блок приема. При поступлении сигналов ТУ информация поступает в блок приема сигналов ТУ (БПрТУ) и далее в объекты телеуправления включая или выключая их. При обращении в блок передачи сигналов ТС (БПдТС) происходит опрос состояния датчиков ТС и передача информации о их состоянии через БРР и ЛУ в линию связи и далее на ПУ. При обращении в блок приема сигналов ТИ (БПрТИ) код управления этого блока происходит опрос состояния датчиков ТИ, преобразование аналоговой информации из ТИ 1 с помощью АЦП в цифровую форму и передача данной информации через БРР и ЛУ в ПУ.
Похожие работы
... информации о количестве полученной потребителем или выработанной производителем тепловой энергии, температуре, давлении, объеме (массе) теплоносителя и о времени работы в открытых и закрытых водяных системах теплоснабжения при давлениях до 1,6 МПА (16 кгсм2) и температурах до +150 °С. Область применения - теплоэнергетика, системы коммерческого учета расхода горячей воды и тепловой энергии, ...
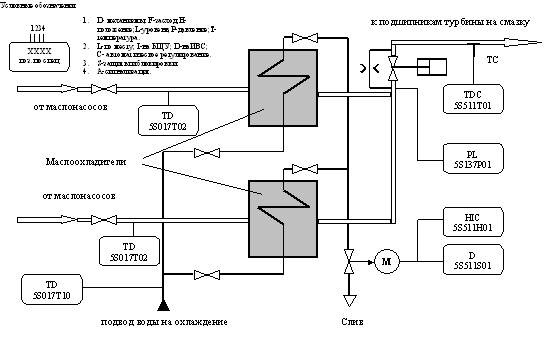
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
... путем замены программного обеспечения. В 1992 году был изготовлен первый в Беларуси комплекс телемеханики "Сириус", построенный на восьмиразрядных микропроцессорах. Часть программного обеспечения и конфигурация системы загружалась в память контроллеров с ПЭВМ. Современные программно-технические комплексы (например, ПТК АРКОНА, разработанный в 2001 году) строят также на основе микропроцессорных ...
... передачи Тц = 2,2 сек определяется расчетное значение частоты мультивибратора: , где k - коэффициент, учитывающий отношение периода колебаний мультивибратора передающего полукомплекта к периоду колебаний мультивибратора приемного полукомплекта k = 1. , так как при расчете мультивибратора, работающего совместно с триггером делителем частоты, расчетное значение его частоты удваивается и ...
0 комментариев