Навигация
Имитационное биомеханическое моделирование как метод изучения двигательных действий человека
31030
знаков
0
таблиц
5
изображений
А.В. Воронов Московский городской педагогический университет, Москва
Одним из распространенных методов познания биологических объектов является моделирование. Этот метод позволяет, используя основные законы физики, механики, математики, биологии, физиологии и других наук, объяснить функциональную структуру изучаемого процесса, выявить его существенные связи с внешними объектами, внутреннюю организацию, оценить количественные характеристики. Наиболее полно отражает гносеологическую суть модели определение В.А. Штофа [23]: "Под моделью понимается такая мысленно представленная или материально реализованная система, которая, отображая или воспроизводя объект исследования, способна замещать его так, что ее изучение дает нам новую информацию об этом объекте". Поиск аналога оригинала возможен на основе следующих типов моделей:
- детерминированные модели - модели, построенные на системах алгебраических, регрессионных и дифференциальных уравнений, уравнений в частных производных;
- статистические модели, предсказывающие вероятность различных событий.
Общие подходы к моделированию движений человека . Моделирование локомоций человека в спортивной биомеханике, робототехнике, эргономике, физиологии, реабилитационной и космической медицине ведется по следующим направлениям:
- исследование центральной и периферической организации нормальных и патологических двигательных действий;
- помощь в диагностике и коррекция нарушений опорно-двигательного аппарата с последующей реабилитацией;
- оптимизация рабочего места оператора в системе человек-машина;
- разработка рациональных вариантов двигательных действий с целью достижения запланированного спортивного результата.
Создание биомеханических моделей основывается на двух типах информации: теоретических знаниях об изучаемом двигательном действии и экспериментальных данных, полученных методами видеоанализа, электромиографии, гониометрии и др.
Общая теория моделирования предполагает возможность [33] построения комплексной модели, т.е. включение в модель максимального числа параметров. Подобная тенденция при создании биомеханической модели может привести к тому, что такая модель будет слишком трудной для понимания.
Поскольку модель есть упрощенное (иногда весьма) отражение двигательного действия, необходимо на начальной стадии моделирования определить существенные и несущественные составляющие модели, т.е. решить, какие параметры включать в модель, а какими пренебречь. Чем проще модель, тем быстрее ее можно создать и тем меньше вероятность ошибок при написании формализованной части. Баланс между комплексностью модели и ее информационной значимостью зависит от целей моделирования. Модель, работающая по системе "черного ящика" и функционирующая в реальном режиме времени, в некоторых случаях намного полезнее самой подробной модели, дающей результаты после многочасовых расчетов.
Каждая модель должна удовлетворять метрологическим правилам надежности и достоверности. Свойство "надежность" отражает способность модели давать сходную информацию вне зависимости от того, кто этой моделью пользуется. В "хороших" моделях возможность субъективной подстройки параметров модели под ожидаемый результат отслеживается программной частью и сводится к минимуму.
Достоверность модели заключается в ее способности отражать исследуемый биомеханический процесс. Если теоретические и экспериментальные значения согласуются - модель достоверна. Однако не всегда возможно оценить точность некоторых параметров модели экспериментальными методами. Например, силы межзвенных реакций нельзя измерить силоизмерительными датчиками без нарушения целостности двигательного аппарата человека. На помощь приходят косвенные методы оценки достоверности модели. Для случая межзвенных сил можно ограничиться измерениями реакций опоры с помощью силоизмерительных платформ. Если модель дает реакции опоры, близкие к величинам, зарегистрированным с помощью силоизмерительных устройств, то с большой долей вероятности можно считать, что такая модель корректно оценивает и силы в суставах.
Моделирование двигательного аппарата человека. Локомоторный аппарат состоит из трех систем:
- скелета, состоящего из костей, суставов и связок, обеспечивающих жесткость тела человека и противодействие силе тяжести;
- мышечной системы, состоящей из мышц и сухожилий, выполняющих функцию движителей;
- нервной системы, обеспечивающей управление и мышечным сокращением и контроль за ним.
Три системы анатомически и функционально объединены друг с другом. Мышцы соединены с костной системой в местах крепления сухожилий и апоневрозов к скелету. Нервная система связана с мышцами посредством мотонейронов и проприоцепторов. Нервная система организует активацию и сокращение мышц, рецепторы мышц через механизм обратной связи влияют на работу мотонейронов. Длина мышц и, следовательно, состояние рецепторного аппарата определяются геометрическими размерами скелета и углами в суставах.
В связи с анатомическими особенностями строения тела человека антропоморфная модель может быть представлена тремя видами моделей, анатомическая основа которых следующая: а) кости и суставы; б) мышцы, сухожилия, кости, суставы и связки; в) нервная система, мышцы, кости, суставы и связки.
Прежде чем моделировать такую сложную систему, как тело человека, необходимо определить цель моделирования и исходя из нее выбрать модель. Структура модели предполагает задание числа звеньев, тип суставов, количество и вид движителей. Если представить полную модель тела человека, состоящую из костей позвоночника и черепа, верхней и нижней конечностей, то такая модель будет состоять более чем из 80 твердых тел (костей) и иметь 250 степеней свободы [37]. Создать математический алгоритм такой комплексной и "необозримой", в смысле размерности, задачи достаточно трудно. В настоящее время из моделей тела человека наиболее полными являются: 16-17-звенные модели с 40-44 степенями свободы, разработанные [2, 30, 10, 11].
В зависимости от целей исследования выбирают и вид модели. Наиболее часто используют 11-звенную плоскую модель. Подобная модель с высокой точностью описывает такие локомоции, как ходьба, легкоатлетический бег, бег на коньках [37, 41].
Исследование локомоций человека с помощью плоской многозвенной модели осуществляется как в виде прямой, так и в виде обратной задач динамики.
При решении прямой задачи динамики вводят начальную конфигурацию системы, а также вектор управления. После численного интегрирования системы дифференциальных уравнений находят конечную конфигурацию системы и кинематические и динамические траектории [30, 31, 22, 13, 14, 16, 24]. Для того чтобы при решении не были искажены физиологические параметры, добавляют некоторые ограничения на кинематику и динамику модели. Например, при моделировании мышечной системы добавляют зависимости "сила-скорость ", "сила-длина " [26, 39]. Для упрощения решения системы дифференциальных уравнений достаточно часто линеаризуют уравнения [22, 3]. При моделировании, основанном на интегрировании дифференциальных уравнений, необходимо найти ответ на вопрос: "Какими должны быть начальные кинематические и динамические параметры, для того чтобы механическая система перешла из одного известного положения в другое?"
При решении обратной задачи динамики по известной кинематике находятся силы/моменты, вызвавшие это движение. Особое внимание при таком способе моделирования уделяется уравнениям. Они должны как можно точнее описывать исследуемый биологический процесс с учетом физических, анатомических и физиологических параметров [19, 36]. Например, при моделировании бега на коньках [6, 41] учитываются силы аэродинамического сопротивления сегментов тела и силы трения коньков о лед. Для оценки нагрузки на мышечную систему используют уравнения "сила-время" , "сила-скорость" , "сила-длина" , периоды электрической активности мышц [30].
При решении как прямой, так и обратной задачи механики предположения, лежащие в основе построения модели тела человека, следующие:
- сегменты тела человека (включая туловище) абсолютно твердые;
- все суставы идеальные;
- длины сегментов, положения центров масс известны;
- определены линейная и угловая кинематика звеньев тела;
- массы, тензор моментов инерции звеньев тела известны;
- силы реакции приложены в центрах вращения в суставах;
- моменты управления являются функциями сил межзвенных реакций, углов, угловых скоростей;
- силы сопротивления внешней среды известны.
Остановимся несколько подробнее на некоторых предположениях, сделанных выше. Утверждение о том, что все сегменты тела человека абсолютно твердые, вполне корректно для таких сегментов, как плечо, предплечье, бедро и голень. Для стопы предположение об абсолютной твердости является вынужденным [15]. Идеальные цилиндрические шарниры не отражают анатомии суставов, однако удобны для математического моделирования.
Предположение о наличии движителей в суставах в виде мышечных моментов позволяет избежать необходимости включения в модель плеч тяги мышц. Несмотря на спорность многих предположений, применяемых при построении антропоморфных моделей, эти модели работают и дают исследователям необходимую информацию о кинематике и динамике локомоций человека [2].
Модели управления антропоморфного механизма. После создания антропоморфной модели необходимо выбрать систему управления звеньями тела. Наиболее простой вид управления представляют приводы, создающие моменты в шарнирах [31]. Каждый привод создает момент относительно оси вращения в суставе. Схема управления приводами основана на реципрокном торможении антагонистов: момент создают только мышцы-агонисты, момент антагонистов равен нулю. Задача с приводным управлением при известных силах реакции опоры всегда однозначно разрешима.
В том случае, если в качестве движителей рассматриваются мышцы, число неизвестных много больше степеней свободы антропоморфного механизма. Так, управление верхней конечностью с 7 обобщенными координатами в модели [34] осуществляется 32 мышцами. Движения в трех суставах нижней конечности осуществляются как минимум 9 мышцами [40, 17]. Для нахождения решения в таких моделях, когда число неизвестных больше числа уравнений, необходимо создать алгоритм управления мышцами, отличный от приводного. Поскольку координационные механизмы преодоления мышечной избыточности ясны не до конца, исследователи придумывают схемы управления двигательными действиями на основе известных математических алгоритмов. Наиболее часто встречающимся математическим способом преодоления мышечной избыточности является метод минимизации целевой функции. В биомеханических исследованиях целевые функции чаще всего отражают следующие физиологические параметры: минимумы метаболической энергии, механической работы, сил тяги мышц и т.п. Предлагаемые критерии поверхностно отражают механизмы управления ЦНС мышцами, однако для некоторых типов локомоций принцип минимума целевой функции дает результаты, близкие к экспериментально измеренным силам тяги мышц [27, 28, 31].
Механизмы управления мышечной активностью и скоростно-силовыми характеристиками мышц подробно исследованы в односуставных движениях [32, 21] и локомоциях, совершаемых преимущественно в одной плоскости, таких, как ходьба, вертикальная стойка, прыжки вверх.
Силы тяги мышц, мышечные синергии в пространственных локомоциях, к которым относится большинство спортивных движений, изучены недостаточно.
По нашему мнению, метод имитационного моделирования является подходящим инструментом, способным исследовать механизм управления в пространственных движениях человека. С помощью этого метода можно количественно оценить как внутреннюю (координационную) структуру двигательных действий (через амплитуду и знаки мышечных моментов), так и внешние проявления мышечной активности - скорости и силы в центрах масс сегментов [4].
Исследование биологических систем методом имитационного моделирования. Имитационное моделирование проводится с целью изучения сложных биологических систем. Например, энергообеспечение мышечной деятельности [20], мышечное сокращение [1]. Эти модели имеют большую размерность, и не до конца ясны и формализованы механизмы изучаемых процессов. Такие модели могут состоять как из логических (неформализованных), вероятностных, так и математических блоков.
Термин "имитация" означает такой подход к изучению систем, когда информация о функционировании этой системы и ее частей получается за счет многократного проигрывания на ЭВМ модели системы. Результатами многократного повторения модели биологического объекта с различными входными физиолого-анатомическими параметрами, формами математической связи между составляющими биологической системы являются:
а) оптимальный вариант управления системой;
б) наилучший режим функционирования;
в) рациональный способ ее применения [20, 12];
г) корригируется поведение реальной системы (например, тактические действия спортсмена на дистанции [20] и
д) делается предпочтительный выбор техники движений [6, 41].
Поскольку при моделировании биологических систем часть компонентов неизвестны или известны неточно, имитационная модель, описывающая биологический процесс, является всего лишь его копией. В зависимости от точности модельных блоков результаты компьютерного перебора модельных вариантов позволяют: а) рассчитать искомые параметры или б) определить тенденции в поведении биологической системы, в том числе и антропоморфного механизма.
Изменение некоторых входных данных антропоморфной модели влияет на силы, моменты, мощности в суставах, механическую работу, поэтому исследователь может определить, каким образом каждый параметр влияет на конечный результат. Такая постановка имитационной задачи сводится к ответу на вопрос: "Что, если?".
Имитационное моделирование в биомеханике . Метод имитационного моделирования применительно к биомеханическим задачам позволяет, не регистрируя кинематику и динамику двигательного действия, только по кинетограмме, созданной на компьютере:
а) оценить [6, 41] максимальные усилия мышц;
б) определить суставы, на которые больше всего падает нагрузка с целью предотвращения травм;
в) рассчитать механические энергозатраты и разработать эффективные варианты двигательных действий и т. п.
При построении имитационных антропоморфных компьютерных моделей исходили из того, что движение человека можно представить в виде определенной последовательности фаз, повторяющихся двигательных циклов. В большинстве локомоций человека кинематические параметры движения достаточно хорошо изучены. Известны временная длительность фаз, средняя скорость звеньев в фазах, углы и угловая скорость в суставах в начале и конце каждой фазы. Так, нормальная ходьба состоит из следующих фаз: переднего толчка, заднего толчка и маха. В беге на коньках фазовый состав движения следующий: фазы свободного проката (I фаза), одноопорного отталкивания (II фаза) и двухопорного отталкивания (III фаза) [18]. Рассмотрим задачу имитационного моделирования локомоций человека на примере бега на коньках.
Задание кинематических характеристик локомоций . При моделировании движения человека с помощью ЭВМ разработали следующий алгоритм:
а) модели тела человека придавали форму, соответствующую началу/окончанию фаз, например для бега на коньках такие положения, как "начало свободного проката", "начало одноопорного" и "окончание двухопорного положения" (рис. 1), назвали их "базисные кинематические положения";
б) задавали время между фазами и среднюю скорость полюса модели (тазобедренного сустава) в фазах;
в) в качестве интерполирующей функции - математической зависимости, дающей кинематическую последовательность между базисными точками, применяли сплайны (кубический сглаживающий или интерполяционный). Использование сплайна позволяет получить кинетограмму движения с любым временным интервалом между точками.
При выборе математической зависимости, связывающей время и кинематику движения, необходимо учитывать:
1) наличие "разрывов" в производных, т.е. таких элементов в фазах, при которых происходят быстрые изменения в скорости. Например, при постановке стопы на опору при ходьбе, беге, прыжках происходит резкое изменение вертикального ускорения. Следовательно, если рассматривать локомоции с быстро меняющейся скоростью за аппроксимирующую функцию, следует взять тригонометрические полиномы [25] или кусочно-полиномиальные функции, дающие лучшее приближение модельной кинематики к реальной в точках "разрыва" скоростей [2];
2) в том случае, если моделируются движения, у которых отсутствуют быстрые изменения скоростей, например: бег на коньках, плавание, бег на лыжах, то при построении кинетограммы подобных локомоций на ЭВМ можно использовать гладкие функции типа полиномов: алгебраического или интерполяционного сплайна [29], сглаживающих сплайнов 3-й или 5-й степени.
Начало свободного проката (А)

Начало одноопорного отталкивания (Б)
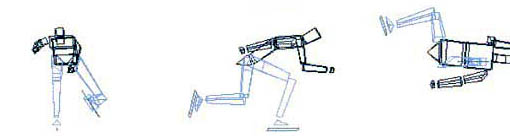
Начало двухопорного отталкивания (В)

Рис. 1. Базисные кинематические положения при моделировании бега на коньках
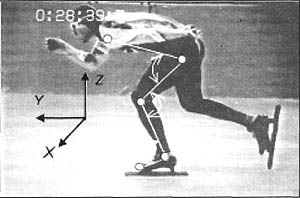
Рис. 2. Положительное направление моментов в суставах толчковой ноги
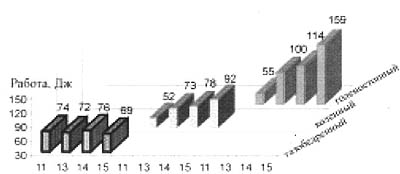
Рис. 3. Механическая работа в суставах толчковой ноги относительно оси X инерциального базиса при разной скорости бега на коньках
Необходимо отметить, что математические зависимости, описывающие кинематику модели (сплайны, тригонометрические полиномы), весьма чувствительны к способу задания начальных (базисных) кинематических данных и к краевым условиям [35]. Например, произвольность по времени между базисными точками может привести к тому, что кинетограмма модели станет существенно отличаться от реального движения.
Для того чтобы избежать искажения кинематики в имитационной модели перед ее созданием поступили следующим образом:
а) исследовали кинематику моделируемой локомоции (бег на коньках по прямой) с помощью видеорегистрирующей методики. Наличие исходных кинематических данных с дискретностью 40 мс (частота видеорежима PAL) дает возможность с приемлемой точностью определить кинематические параметры модели;
б) чтобы краевые условия не влияли на скорость и ускорение изучаемого движения, справа и слева от изучаемого цикла задавали дополнительно не менее трех фаз [41].
Трехмерная имитационная модель локомоций человека (на примере бега на коньках). Пространственная имитационная модель локомоций человека была реализована для бега на коньках по прямой. Уравнения модели, описывающие трехмерное движение звеньев тела, даны в [10]. Построение имитационной модели проходило в несколько этапов:
1. На первом этапе определили масс-инерционные характеристики сегментов тела конькобежца : массы, моменты инерции звеньев, положения центров масс и биомеханические длины звеньев [7, 9].
2. На втором этапе исследовали особенности движения конькобежца в двухопорной фазе. Для этого оценили величину поперечного смещения звеньев тела конькобежца, рассчитали центробежную силу, действующую на толчковый конек, и тем самым ввели ограничения на "разгрузку толчковой ноги" в двухопорной фазе. При расчете загрузки опорной ноги и моментов в суставах применяли уравнения из работы [5].
3. На третьем этапе определили аэродинамическое сопротивление сегментов тела конькобежца. Включение в модель аэродинамических сил необходимо, так как аэродинамическое сопротивление - основная тормозящая сила, действующая на конькобежцев. Коэффициенты аэродинамического сопротивления Сх для разных форм посадки конькобежцев в зависимости от скорости и вида бега: с руками или без рук, по прямой или по повороту - составили от 0,75 до 1,2 [8, 38]. Суммарная величина сопротивления воздуха для всего тела конькобежца (сила, приложенная к ОЦМ) в зависимости от формы посадки при скорости бега 15 м/c составляет 45-61 Н. Наибольшее воздействие силы аэродинамического сопротивления приходится на туловище - около 30% от суммарной силы. Аэродинамическое сопротивление голени и бедра ног не превышает 10 Н.
4. На четвертом этапе рассчитали кинематические характеристики имитационной модели бега на коньках. К ним относятся: длина шага, длительность фаз: свободного проката, одноопорного отталкивания и двухопорного отталкивания; средняя скорость по фазам, ширина "елочки", формы посадки конькобежцев.
Выше было сказано, что способ задания базисных точек кинетограммы существенно влияет на скорости и ускорения изучаемого движения и, значит, на результаты решения ОЗД. При моделировании бега на коньках для более точного задания линейных и угловых характеристик локомоций использовали данные видеосъемки конькобежцев. Перед тем как создать кинетограмму бега на ЭВМ, сначала методом биомеханической видеосьемки и компьютерных программ определяли углы, угловые скорости в суставах в трех положениях: в начале фазы "свободного проката" (рис. 1А); в начале одноопорного отталкивания (рис. 1Б); в начале двухопорного отталкивания (рис. 1В); в завершении двухопорного отталкивания (рис. 1Б).
Зная расстояние между масштабными метками на дорожке, определяли путь и среднюю скорость тазобедренного сустава (полюса модели) между базисными точками в продольном направлении.
Аналогичную последовательность в обработке кадров применяли и для видеоряда поперечных движений конькобежцев.
5. На пятом этапе в компьютерную модель включили данные по анатомическому строению мышц нижней конечности конькобежцев - точки крепления мышцы к костям, физиологический поперечник, длины мышечной и сухожильной частей, состав волокон; угол перистости [9].
Похожие работы
... например анкеты-интервью. На стр. 143 дана развернутая характеристика лишь анкетирования: во-первых, оно является наиболее распространенным методом в теории и практике физического воспитания; во-вторых, владение методикой анкетирования дает исследователю основной объем знаний и умений для овладения другими методами опроса; в-третьих, анкетирование более доступно основной массе исследователей, не ...
... ОТЛИЧНО 3 15 1 5 ХОРОШО 13 65 10 50 УДОВЛЕТВОРИТЕЛЬНО 4 20 9 45 НЕУДОВЛЕТВОРИТЕЛЬНО 0 0 0 0 Основное содержание методики обучения гимнастическим упражнениям с использованием идеомоторной тренировки студентов 2 курса факультета физической культуры представлена в четвертой главе. ГЛАВА IV. Методика обучения гимнастическим упражнениям с использованием ...
... Зинченко. Воронеж : НПО «МОДЭК», 1997. 604 с. 10. Бернштейн, Н. А. Физиология движения и активности / Н. А. Берн-штейн. М.: Наука, 1990. 496 с. 11. Бибиков, С.В. Методика развития координационных способностей юных боксеров на основе моделирования условий их соревновательной деятельности: дисс ... канд. пед. наук : 13.00.04. Волгоград, 2008. 141 с. 12. Боген, М.М. Обучение ...
... отражает общую координационную напряженность; концентрация внимания на сочетании фазы расслабления с форсированным выдохом, способствующим расслаблению по механизму моторно-висцеральных рефлексов и т.д. 2.3 Развитие координационных способностей волейболистов Выполнение любого технического приема строится на основе старых координационных связей. Чем больший запас разнообразных двигательных ...
0 комментариев