Навигация
Аналитическое и графическое определение режимов работы асинхронной машины
19960
знаков
0
таблиц
5
изображений
3. Аналитическое и графическое определение режимов работы асинхронной машины
Электромеханическое преобразование энергии может происходить в асинхронной машине в следующих трех режимах:
в режиме двигателя 0 < s < l, Ω1 > Ω > 0;
в режиме генератора s < 0, Ω > Ω1;
в режиме тормоза s > 1, Ω < 0.
Кроме того, важны еще два характерных режима работы, в которых электромеханическое преобразование энергии не происходит: режим идеального холостого хода (s = 0, Ω = Ω1) и режим короткого замыкания (s = 1, Ω = 0).
В режиме двигателя (область Д на рис. 3.2) под воздействием электромагнитного момента Μ > 0, направленного в сторону поля, ротор машины вращается в сторону поля со скоростью, меньшей, чем скорость поля (Ω1 > Ω > 0, 0 < s < 1). В этом режиме
Ρэм = ΜΩ1 = ![]() > 0; Ρмех = ΜΩ = Ρэ2
> 0; Ρмех = ΜΩ = Ρэ2 ![]() > 0.
> 0.
Электрическая мощность Р1 = Рэм + Рм + Рэ1 > 0 преобразуется в механическую мощность Р2 = Рмех — Ρд — ΡΊ > 0, передаваемую через вал приводимой в движение машины.
Энергетические процессы в режиме двигателя иллюстрируются рис. 3.1, а, на котором направление активной составляющей тока ротора i2а совпадает с индуктированной в роторе ЭДС. Направление электромагнитного момента Μ определяется электромагнитной силой Bmi2a, действующей на ток i2a .
Полезная механическая мощность Р2 оказывается меньше потребляемой из сети мощности на потери ΣΡ:
Ρ2 = Ρ1-ΣΡ = Ρ1 -(Ρэ1 + Ρм+Ρэ2 + Ρд + Ρт),
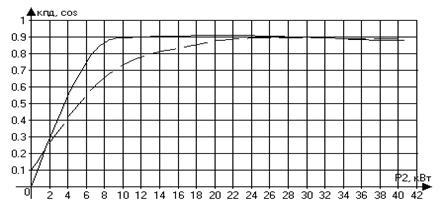
И КПД двигателя выражается формулой:
η = ![]() = 1-
= 1-![]() = f(s)
= f(s)
В режиме генератора (область Г на рис. 3.2) под воздействием внешнего момента Мв > 0, направленного в сторону поля (рис. 3.1, б), ротор машины вращается со скоростью, превышающей скорость поля (Ω > Ω1, s < 0). В этом режиме в связи с изменением направления вращения поля (Ω^) относительно ротора активная составляющая тока ротора г'2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент Μ = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М < 0), мощности Рэ„ и Ртх также отрицательны:
Ρэм = ΜΩ1 = ![]() < 0; Ρмех = ΜΩ = Ρэ2
< 0; Ρмех = ΜΩ = Ρэ2 ![]() < 0.
< 0.
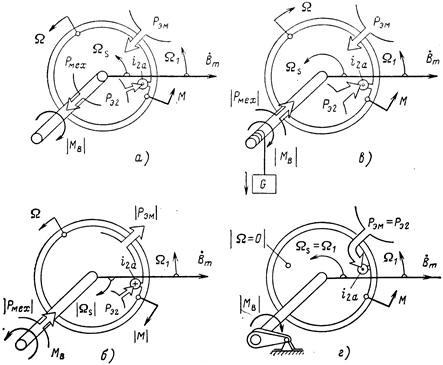
Рис. 3.1. Режимы работы асинхронной машины.
а — двигательный;
б — генераторный;
в — тормоза;
г — трансформатора (или короткого замыкания).
Направление преобразования энергии изменяется на обратное: механическая мощность Рг, подведенная к валу машины, преобразуется в электрическую мощность Plt поступающую в сеть. Поскольку мощность потерь всегда положительна (в любом режиме работы эти мощности превращаются в тепло), механическая мощность:
Ρмех = Ρэм - Ρэ2 < 0 при s < 0
по абсолютному значению больше, чем электромагнитная (рис. 3.2):
|Ρмех| = | Ρэм | + Ρэ2
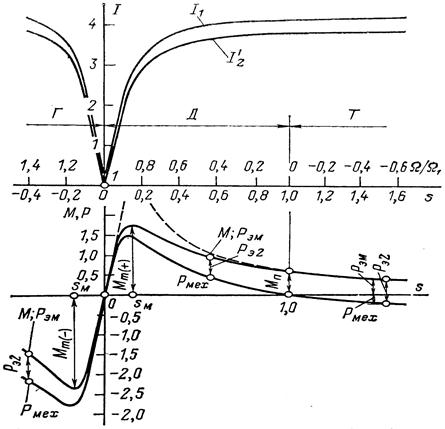
Рис. 3.2. Электромеханические характеристики асинхронной машины (в относительных единицах при 1/х = 1; /0 = 0,364; cos <р0 = 0,185; Хг = Х'2 = 0,125; Кг = 0,0375; R's = 0,0425).
По той же причине потребляемая механическая мощность
P2 = P1 - ΣΡ < 0
по абсолютному значению на потери больше электрической мощности, отдаваемой в сеть:
|Ρ2| = | Ρ1 | + ΣΡ,
и КПД генератора
η = ![]() = 1-
= 1-![]() .
.
В режиме тормоза (область Т на рис. 3.2) под воздействием внешнего момента Мв < 0, направленного против вращения поля (рис. 3.1, в), ротор машины вращается в сторону, противоположную полю (Ω<0, s = ![]() >1). В этом режиме электромагнитный момент М, уравновешивающий внешний момент, как и в режиме двигателя (направление вращения поля Ω.5 относительно ротора остается таким же, как в режиме двигателя), направлен в сторону поля и считается положительным (М > 0). Однако, поскольку Ω < 0, механическая мощность оказывается отрицательной:
>1). В этом режиме электромагнитный момент М, уравновешивающий внешний момент, как и в режиме двигателя (направление вращения поля Ω.5 относительно ротора остается таким же, как в режиме двигателя), направлен в сторону поля и считается положительным (М > 0). Однако, поскольку Ω < 0, механическая мощность оказывается отрицательной:
Ρмех = ΜΩ = Ρэ2 ![]() < 0
< 0
Это означает, что она подводится к асинхронной машине. Электромагнитная мощность в этом режиме положительна:
Ρэм = ΜΩ1 = ![]() > 0
> 0
Это означает, что она поступает из сети в машину.
Подведенные к ротору машины со стороны сети |Ρэм| и вала |Ρмех| мощности превращаются в электрические потери Рэ2 в сопротивлении ротора R'2 (рис. 3.2):
|Ρмех| + | Ρэм | = Ρэ2 ![]() + Ρэ2
+ Ρэ2![]() = Ρэ2 = m1 R'2(I '2)2 .
= Ρэ2 = m1 R'2(I '2)2 .
Асинхронная машина в этом режиме может быть использована для притормаживания опускаемого подъемным краном груза. При этом мощность | Ρмех | = | ΜΩ | поступает в ротор машины (см. рис. 3.1).
В режиме идеального холостого хода внешний вращающий момент Μв, момент трения Μт = Ρт/Ω и момент, связанный с добавочными потерями, Мд = Ρд/Ω равны нулю. Ротор вращается со скоростью поля (Ω = Ω1, s = 0) и не развивает полезной механической мощности (М = 0, Рмех = ΜΩ = 0).
В режиме идеального холостого хода внешний момент, приложенный к валу машины, равен нулю (Мв = 0). Считается также, что отсутствует момент от трения вращающихся частей. Ротор машины вращается с той же угловой скоростью, что и вращающееся поле (Ω = Ω1), скольжение равно нулю (s = 0); ЭДС и токи в обмотке ротора не индуктируются (I2=0), и электромагнитный момент, уравновешивающий внешний момент и момент сил трения, равен нулю (М = 0).
Режим холостого хода асинхронной машины аналогичен режиму холостого хода трансформатора. В асинхронной машине и в трансформаторе ток в этом режиме имеется только в первичной обмотке I1 ≠ 0, а во вторичной — отсутствует (I2 = 0); в машине и в трансформаторе магнитное поле образуется в этом режиме только первичным током, что позволяет называть ток холостого хода намагничивающим током (I1 = I0). В отличие от трансформатора система токов I0 в фазах многофазной обмотки статора образует вращающееся магнитное поле.
По аналогии с трансформатором уравнение напряжений необходимо составить при холостом ходе только для фазы обмотки статора, являющейся первичной обмоткой:
![]() ,
,
где ![]() — ЭДС, индуктированная в фазе вращающимся магнитным полем с потоком Фга;
— ЭДС, индуктированная в фазе вращающимся магнитным полем с потоком Фга;
![]() — фазное напряжение первичной сети;
— фазное напряжение первичной сети;
R1, Х1 — активное и индуктивное сопротивления рассеяния фазы первичной обмотки (см. далее).
В силу малости падений напряжений X1I0 и R1I0 напряжение ![]() почти полностью уравновешивается ЭДС
почти полностью уравновешивается ЭДС ![]() т. е.
т. е. ![]() = -
= -![]() .
.
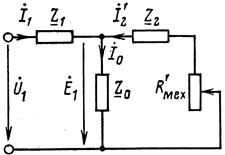
В режиме холостого хода R'мех = R'2![]() = ∞, ток R'2 = 0 и схема замещения содержит только одну ветвь Z1 + Z0 (Т-образная и Г-образная схемы не отличаются друг от друга).
= ∞, ток R'2 = 0 и схема замещения содержит только одну ветвь Z1 + Z0 (Т-образная и Г-образная схемы не отличаются друг от друга).
В режиме короткого замыкания под действием внешнего момента Μ в, уравновешивающего электромагнитный момент М, ротор удерживается в неподвижном состоянии (Ω = 0, s = ![]() = 1) и не совершает полезной механической работы (Рмех = Μ Ω = 0).
= 1) и не совершает полезной механической работы (Рмех = Μ Ω = 0).
Направление тока i2a и электромагнитного момента Μ остается таким же, как в режиме двигателя, и Μ > 0 (см. рис. 3.1, г). Электромагнитная мощность Рэм = ΜΩ1 > 0 — она поступает в ротор из статора и превращается в электрические потери (Рэм = = Рэ2). В этом режиме асинхронная машина работает как коротко-замкнутый со вторичной стороны трансформатор, отличаясь от него только тем, что в ней существует вращающееся поле взаимной индукции вместо пульсирующего поля в трансформаторе.
В режиме короткого замыкания R'мех = R'2![]() = 0 и сопротивление схемы замещения по рис. 42-3 определяется параллельно включенными сопротивлениями Z1 + Z0 и Z1 + Z'2. Имея в виду, что |Z1 + Z'2| « |Z1 + Z0|, можно отбросить ветвь Z1 + Z0 и считать сопротивление схемы замещения при коротком замыкании равным
= 0 и сопротивление схемы замещения по рис. 42-3 определяется параллельно включенными сопротивлениями Z1 + Z0 и Z1 + Z'2. Имея в виду, что |Z1 + Z'2| « |Z1 + Z0|, можно отбросить ветвь Z1 + Z0 и считать сопротивление схемы замещения при коротком замыкании равным
Zк = Z1 + Z'2 = Rк + jXк (43-3)
где
Rк= R1+ R'2
Если к неподвижному ротору асинхронной машины подключить симметричную систему дополнительных сопротивлений R2д + jХ2д, то она будет работать как трансформатор, преобразующий электрическую энергию, поступающую из первичной сети, в электрическую энергию с другими параметрами, потребляемую дополнительными сопротивлениями R2д + jХ2д. Поэтому режим при s = 1 называется также режимом трансформатора.
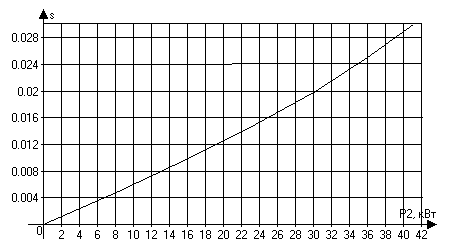
Изменить режим работы асинхронной машины или скольжение машины в данном режиме (при U1 = const и f1 = const) можно только путем изменения внешнего момента Мв, приложенного к валу машины. При Мв = 0 ротор вращается со скоростью поля (Ω = Ω1, s = 0) и машина не совершает полезного преобразования энергии. При воздействии на вал ротора внешнего момента Мв, направленного против направления вращения поля, скорость ротора уменьшается до тех пор, пока не появится электромагнитный момент Μ = f(s), который уравновесит момент Мв. Машина переходит в режим двигателя s = ![]() > 0. Наоборот, при воздействии внешнего момента Мв направленного по вращению поля, скорость ротора делается большей, чем скорость поля (Ω > Ω1), и машина переходит в режим генератора (s=
> 0. Наоборот, при воздействии внешнего момента Мв направленного по вращению поля, скорость ротора делается большей, чем скорость поля (Ω > Ω1), и машина переходит в режим генератора (s=![]() <0).
<0).
Наконец, к режиму тормоза можно перейти из режима двигателя, изменяя внешний момент Мв таким образом, чтобы ротор сначала остановился, а затем пришел во вращение в противоположную сторону (по отношению к полю).
Список литературы
Иванов-Смоленский А. В. Электрические машины: Учебник для вузов. – М.: Энергия, 1980. – 928 с., ил.
Вольдек А. И. Электричесие машины. Учебник для студентов высших учебн. Заведений. Л., «Энергия», 1974.
Проектирование электрических машин: Учеб. Для вузов / Под ред. И. П. Копылова. М.: Высш. Шк., 2002. – 757 с.: ил.
Похожие работы

... Потери, не изменяющиеся при изменении скольжения : Pст. + Pмех. = 727,12+125,6 = 852,17 Вт. Таблица 1. Рабочие характеристики асинхронного двигателя. Параметр Ед-ца Скольжение 0,005 0,01 0,015 sн=0,019 0,02 0,025 0,03 a’×r’2/s Ом 48,53 24,27 16,18 12,77 12,13 9,71 8,09 b’×r’2/s Ом 0 0 0 0 0 0 0 R = a + a¢*r¢2/s Ом 49,04 ...
... тепловой схемы выполнялось для стационарного режима, так как коэффициенты теплоотдачи в переходном и стационарном режимах одинаковы. Полученные результаты используются в компьютерной лабораторной работе «Моделирование нагрева асинхронного двигателя в различных режимах работы». Лабораторная работа выполнена в программной среде MatLab 6.1, и в ее приложении Simulink 4. Данная работа позволяет ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
0 комментариев