Навигация
Проектирование асинхронных двигателей
31692
знака
18
таблиц
14
изображений
Содержание
1. Введение
2. Расчет и конструирование двигателя
2.1. Выбор главных размеров
2.2. Расчет обмотки статора
2.3. Расчет размеров зубцовой зоны статора и выбор воздушного зазора
2.4. Расчет ротора
2.5. Расчет магнитной цепи
2.6. Расчет параметров рабочего режима
2.7. Расчет потерь
2.8. Расчет рабочих характеристик
2.9. Расчет пусковых характеристик
3. Моделирование двигателя в среде MatLab Power System Blockset
3.1. Моделирование с параметрами номинального режима
3.2. Моделирование с параметрами пускового режима
1. Введение
Асинхронные машины получили наиболее широкое применение в современных электрических установках и являются самым распространенным видом бесколлекторных электрических машин переменного тока. Как и любая другая электрическая машина, асинхронная машина обратима и может работать как в генераторном, так и в двигательном режимах. Однако преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода. Области применения асинхронных двигателей весьма широки – от привода устройств автоматики и бытовых электроприборов до привода крупного горного оборудования (экскаваторов, дробилок, мельниц и т.д.). В соответствии с этим мощность асинхронных двигателей, выпускаемых электромашиностроительной промышленностью, составляет диапазон от долей ватт до тысяч киловатт при напряжении питающей сети от десятков вольт до 10 кВ. Наибольшее применение получили трехфазные асинхронные двигатели, рассчитанные на работу от сети промышленной частоты (50 Гц).
В данном курсовом проекте рассматривается следующий двигатель:
Исполнение по степени защиты: IP44 – по первой цифре соответствует защите от возможности соприкосновения инструмента, проволоки или других подобных предметов, толщина которых превышает 1 мм, с токоведущими или движущимися частями внутри машины; по второй цифре – защите от водяных брызг любого направления, попадающих на оболочку.
Способ охлаждения: IC141 – двигатель, обдуваемый наружным вентилятором, расположенным на валу машины.
В качестве аналога проектируемому двигателю выбран следующий двигатель:
4А200L6У3.
Климатические условия работы: У3 – по букве – для умеренного климата; по цифре – для размещения в закрытых помещениях с естественной вентиляцией без искусственно регулируемых климатических условий, где колебания температуры и влажности воздуха, воздействия песка и пыли, солнечной радиации существенно меньше, чем на открытом воздухе (каменные, бетонные, деревянные и другие неотапливаемые помещения).
В ходе выполнения всего курсового проекта будут проводиться сравнения между проектируемым и аналоговым двигателем.
2. Расчет и конструирование двигателя
2.1. Выбор главных размеров
2.1.1. Синхронная частота вращения, об/мин:
![]() об/мин.
об/мин.
2.1.2. Наружный диаметр статора Da = 349 мм = 0,349 м. [4, стр.164]
2.1.3. Внутренний диаметр статора D = Kd* Da, где Kd – коэффициент, характеризующий отношения внутренних и наружных диаметров сердечников статоров асинхронных двигателей серии 4А. Согласно рекомендациям [4, стр.165] принимаем Kd = 0,72.
D = 0,72*349 = 251 мм = 0,251 м.
2.1.4. Полюсное деление τ = π D/2р = 3,14*0,251/2*3 = 0,131 м.
2.1.5. Расчетная мощность:
![]() , где η = 0,91 [4, стр.165], соsφ = 0,89 [4, стр.165].
, где η = 0,91 [4, стр.165], соsφ = 0,89 [4, стр.165].
![]() кВт.
кВт.
2.1.6. Выбираем предварительно электромагнитные нагрузки, следуя рекомендациям [4, стр.166]: А = 34500 А/м, Вδ = 0,8 Тл.
2.1.7. Обмоточный коэффициент для двухслойной обмотки принимаем (предварительно) ![]() = 0,925.
= 0,925.
2.1.8. Расчетная длина магнитопровода:
 , где Ω – угловая скорость вращения ротора, рад/с;
, где Ω – угловая скорость вращения ротора, рад/с; ![]() рад/с.
рад/с.
![]() м.
м.
Отношение λ = lδ / τ = 0,192/0,131= 1,466. λ находится в допустимых пределах.
2.1.9. Сравним данные расчетного двигателя с данными двигателя-аналога:
| Вид двигателя | Da, м | D, м | lδ, м | η | соsφ |
| Расчетный | 0,349 | 0,251 | 0,192 | 0,91 | 0,89 |
| Аналоговый | 0.349 | 0.25 | 0.185 | 0,905 | 0,9 |
Величины токовой линейной нагрузки, индукции в воздушном зазоре и длина магнитопровода будут уточнены в следующем разделе.
2.2 Расчет обмотки статора
2.2.1 Выбираем предельные значения зубцовых делений, основываясь на [4, стр.170]
tmax= 0,0145 м,
tmin= 0,0111 м.
2.2.2. Вычисляем число пазов статора:
![]() ,
,
![]() .
.
Число пазов на полюс и фазу ![]() .
.
Так как число пазов на полюс и фазу в большинстве асинхронных машин общепромышленного применения желательно принимать целым, то, исходя из этих условий, берем Z = 72 Þ ![]() .
.
2.2.3. Зубцовое деление статора (окончательно): ![]() м.
м.
2.2.4. Число эффективных проводников в пазу (число параллельных ветвей обмотки а первоначально принимаем равным единице):
 , где I1н – номинальный ток обмотки статора.
, где I1н – номинальный ток обмотки статора.
 А.
А.
![]() .
.
2.2.5. Берем число параллельных ветвей а = 3, тогда Uп = а U’п = 3*11,7 = 35,1.
Так как используется двухслойная обмотка, то желательно применение четного числа эффективных проводников в пазу, Þ берем Uп = 36.
2.2.6. Рассчитываем число витков в фазе обмотки (окончательно):
![]() .
.
2.2.7. При определении числа эффективных проводников в пазу были использованы округления, что привело к некоторому несоответствию исходных и рассчитанных данных, поэтому пересчитаем линейную токовую нагрузку и индукцию в воздушном зазоре.
![]() А/м. А находится в допустимых пределах.
А/м. А находится в допустимых пределах.
Поскольку возросла линейная токовая нагрузка, то должна уменьшиться длина магнитопровода: ![]() м, что действительно произошло.
м, что действительно произошло.
λ = lδ / τ = 0,186/0,131= 1,42 – в рекомендуемых пределах, Þ при дальнейших расчетах принимаем lδ = 0,186 м.
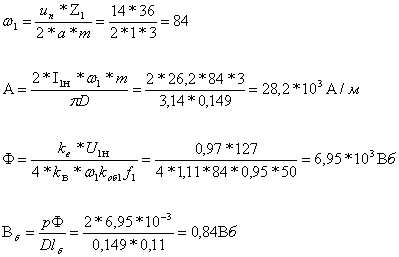
Магнитный поток: Ф =  , где
, где ![]() - окончательное значение обмоточного коэффициента.
- окончательное значение обмоточного коэффициента.
Kоб1 = КУ*КР, где КУ - коэффициент укорочения, КР - коэффициент распределения.
![]() , где β – расчетное укорочение шага обмотки.
, где β – расчетное укорочение шага обмотки.
![]() ,
,
![]() .
.
 .
.
Kоб1 = 0,966*0,958 = 0,925.
![]() мВб.
мВб.
Проверяем значение магнитной индукции в воздушном зазоре:
![]() Тл.
Тл.
2.2.8. Плотность тока в обмотке статора (предварительно):
J1 = (AJ1)/ A= (201*109)/ (35.6*103)= 5,65*106 А/м2![]() ,
,
где произведение линейной нагрузки на плотность тока определяется по [4, стр.173].
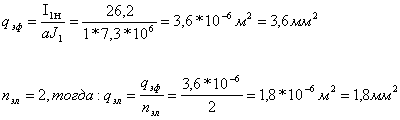
2.2.9. Сечение эффективного проводника (предварительно):
qэф = I1H / (a*J1) = 32,5 / (3*5,65*106) = 1,917*10-6 (м2) = 1,917 мм2.
Берем число элементарных проводников в одном эффективном nЭЛ =1, тогда, руководствуясь [4, стр.172] и [4, стр.470], выбираем обмоточный провод ПЭТВ со следующими данными:
номинальный диаметр неизолированного провода dэл = 1,5 мм
среднее значение диаметра изолированного провода dиз = 1,585 мм
площадь поперечного сечения неизолированного провода qэл = 1,767 мм2
площадь поперечного сечения эффективного проводника qэф = 1,767*1 = 1,767 мм2.
2.2.10. Принимаем окончательную плотность тока в обмотке:
![]() .
.
2.2.11. Сравним данные расчетного двигателя с данными двигателя-аналога:
|
Похожие работы
... 2,54 2,45 2,59 Графики пусковых характеристик спроектированного двигателя с короткозамкнутым ротором изображены на рисунке 6 и рисунке 7. Рисунок 6 – Зависимость Рисунок 7 – Зависимость Спроектированный асинхронный двигатель удовлетворяет требованиям ГОСТ как по энергетическим показателям (КПД и ), так и по пусковым характеристикам. 9. ТЕПЛОВОЙ РАСЧЁТ Превышение температуры ...
... (4.10) Рассчитаем полную высоту паза ротора hП2: (4.11) Уточним площадь сечения стержня : (4.12) 4.10 Определим плотность тока в стержне J2: (4.13) Рисунок 4.1. Паз спроектированного двигателя с короткозамкнутым ротором 4.11 Рассчитаем площадь сечения короткозамыкающих колец qкл: , (4.14) где - ток в кольце, определим по формуле: , (4.15) где , тогда ...
... других затрат. На ремонт и обслуживание асинхронных двигателей в эксплуатации средства составляют более 5 % затрат из обслуживания всего установленного оборудования. Поэтому создание серии высокоэкономических и надежных асинхронных двигателей являются важнейшей народно – хозяйственной задачей, а правильный выбор двигателей, их эксплуатации и высококачественный ремонт играют первоочередную роль в ...
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
0 комментариев