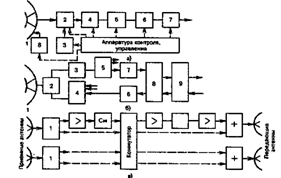
Блок-схема устройства управления
Описание электрической принципиальной схемы
Адресная шина микропроцессора 1821ВМ85
Шина данных микропроцессора 1821ВМ85
Генератор тактовых импульсов
Оперативные запоминающие устройства
Мс. Для регенерации нужны дополнительные схемы, что усложняет схему в целом
Постоянное запоминающее устройство
Таймер
Цессор
Устройство ввода-вывода
Фиксирующая схема
Схема дешифрации
Цифро-аналоговый преобразователь
Расчеты параметров и элементов принципиальной схемы
МкА=8 мкА
Цепь резонатора микросхемы 512 ВИ1
Входной ток, мкА 1
ВВ55
Расчет надежности
Сырье и материалы
Основная заработная плата производственных рабочих
Расчет оптовой цены изделия и сопоставительный анализ с базовым изделием
Обеспечения требований охраны труда на операциях сборки устройства управления тюнером
Расчет местной вытяжной вентиляции
Навигация
Блок-схема устройства управления
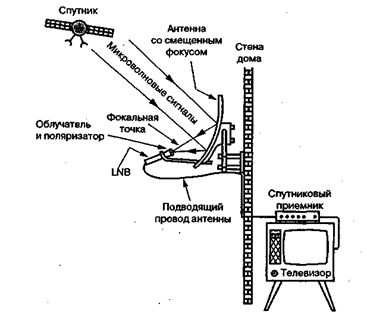
Управление тюнером спутникового телевидения
114328
знаков
79
таблиц
16
изображений
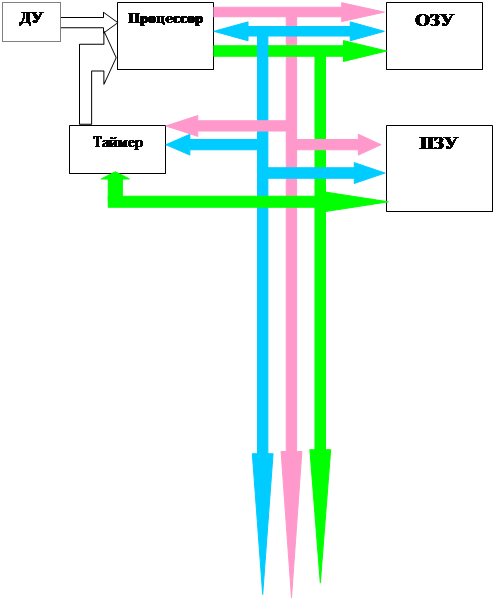
1.1. Блок-схема устройства управления.
Принцип функционирования схемы.
![]()
|
ввода/вывода
БИ – блок индикации
ОЗУ – оперативное запоминающее устройство
ПЗУ – постоянное запоминающее устройство
ДУ – дистанционное управление
Схема дистанционного управления (ДУ) генерирует последовательность коротких импульсов ИК излучения, в соответствии с нажатой кнопкой на панели ДУ. Каждая последовательность состоит из 14 импульсов, из которых 11 импульсов информационных, а также предварительный, запускающий и останавливающий импульсы. С помощью 11 информационных импульсов, мы передаем сигнал ДУ, который представляет собой десятибитовое слово. Его четыре первых бита отведены для передачи адреса, а остальные для передачи команды. Таким образом можно сформировать 16 групп адресов по 64 команды в каждой (в нашем случае будем использовать 16 команд с одним строго определенным адресом).
Двоичная информация каждого бита определяется длительностью интервалов между импульсами. Логическому «0» соответствует основной интервал времени Т, логической «1» – 2Т.
Временной интервал между предварительным и запускающим импульсами – 3 Т, между запускающим и первым информационным – Т, между последним информационным и останавливающим – 3Т.
![]()
Предвари- Запуска- Биты Биты Останав- тельный ющий адреса команды ливающий
![]()
![]() импульс импульс
импульс импульс
| 3Т | 2Т | 3Т | |||||||||||||||||||||||||||||||
| Т | |||||||||||||||||||||||||||||||||
Данная информация поступает в процессор, функции которого:
1) Принять сигналы ДУ;
2) Выделить биты команды;
3) Определить какой кнопке ДУ соответствует данная команда;
4) Обеспечить выполнение данной команды, управляя и синхронизируя деятельностью всего устройства управления.
Как известно процессор выполняет все действия согласно программе, которая хранится в ПЗУ. Вопросы записи программы в ПЗУ в данном случае рассматриваться не будут. Значит для функционирования процессору необходимо считывать информацию (программу), которая хранится в ПЗУ. Для этого процессор соединен с ПЗУ тремя шинами:
1) Шиной адреса;
2) шиной данных;
3) шиной управления.
Для считывания информации из ПЗУ необходимо выполнить следующие действия:
1) обеспечить стабильность уровней сигналов на адресной шине;
2) подготовить шину данных для приема данных в микропроцессор;
3) после шагов 1 и 2 активировать шину управления чтением из памяти.
Значит микропроцессор обрабатывает сигналы ДУ, согласно программе, которая хранится в ПЗУ.
Так как в процессе выполнения программы будут формироваться данные, которые понадобятся для дальнейшего функционирования схемы устройства управления, то нужно предусмотреть дополнительную область памяти, где эти данные будут храниться и откуда при необходимости будут считываться. Для этого в данной схеме используется ОЗУ.
Отличительной особенностью ОЗУ от ПЗУ является то, что данные из ОЗУ могут не только считываться, но и записываться в ОЗУ.
Для сопряжения микропроцессора и ОЗУ используются те же 3 шины:
1) шина адреса;
2) шина данных;
3) шина управления.
Считывание данных из ОЗУ аналогично считыванию данных из ПЗУ, а для записи необходимо выполнить следующие действия:
1) на адресной шине должен быть активирован адрес памяти (т.е. адрес ячейки, куда записываются данные);
2) на шину данных должны поступить данные из микропроцессора;
3) после осуществления действий 1 и 2 на линию записи в память шины управления должен поступить импульс разрешения записи.
Вывод: Микропроцессор обрабатывает сигналы ДУ и «принимает» решения согласно программе, хранящейся в ПЗУ. Данные, которые появляются в процессе выполнения программы, хранятся в ОЗУ.
Таким образом, на уровне блок-схемы рассмотрены 4 блока устройства управления, их функции и сопряжения между собой.
Более подробное описание организации соединения ДУ и микропроцессора, микропроцессора и ОЗУ, микропроцессора и ПЗУ будет рассмотрено ниже, когда будут выбраны конкретные интегральные схемы микропроцессора, ОЗУ и ПЗУ. Там же будут рассмотрены принципы организации шины адреса, данных и управления.
Для лучшего понимания функционального назначения остальных блоков устройства управления сначала познакомимся с классификацией сигналов, поступающих с ДУ:
1) сигналы ДУ, в соответствии с которыми происходит включение необходимого канала с последующей настройкой на нужную частоту видео, звука и настройкой на соответствующую поляризацию. Если на нужном канале уже произведена настройка на нужную частоту видео и звука и настройка на соответствующую поляризацию, эти данные хранятся в ОЗУ и считываются при включении соответствующего канал.
2) сигналы ДУ, которыми можно управлять часами реального времени с будильником и календарем.
3) сигнал ДУ, которым можно выключить систему в целом.
Значит необходимо, чтобы устройство управления, анализируя сигналы с ДУ согласно программе, хранящейся с ПЗУ, выполняло следующие функции:
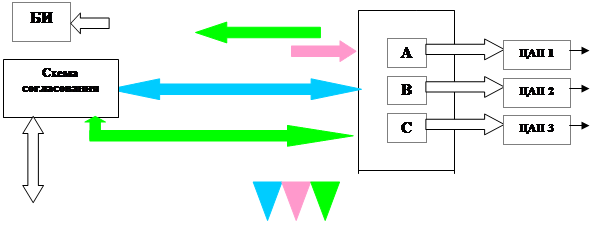
1) выдавало аналоговые сигналы в блоке настройки видео, звука и поляризации.
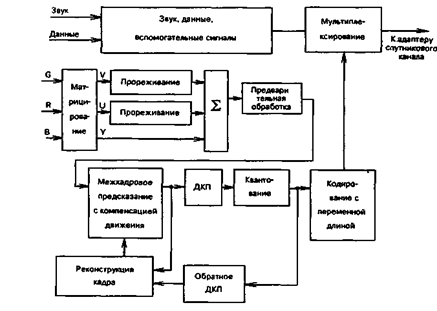
Для этого необходимо обеспечить сопряжение периферийных устройств с шиной данных устройства управления и преобразовать цифровые сигналы в аналоговые. В качестве устройства, выполняющего данные функции, будем использовать программное устройство В/В параллельной информации (содержит 3 выходных канала) и 3 цифро-аналоговых преобразователя. Таким образом, на выходе ЦАП будем иметь аналоговый сигнал пропорциональный коду на входе соответствующего канала. В последствии этот сигнал можно использовать в блоках настройки видео, звука, поляризации.
2) выдавало сигналы в блок индикации для визуального контроля.
Для этого в данном устройстве управления необходимо предусмотреть блок, который будет фиксировать сигналы, поступающие по шине данных в соответствующие моменты времени.
3) обеспечивало организацию часов реального времени с будильником и календарем с последующей подачей сигналов в блок экранной графики и процессор.
Для этого необходимо в устройстве управления использовать таймер, выполняющий данные функции.
4) обеспечить выдачу и прием сигналов в остальные блоки тюнера.
Для этого необходимо предусмотреть блок, согласующий внутреннюю шину данных устройства управления с внешними блоками тюнера в соответствующие моменты времени.
Похожие работы
... быть получен неудовлетворительный результат, а в другом - чрезмерное усложнение конструкции может привести к неоправданному увеличению стоимости оборудования, а приемная система будет выглядеть неэстетично. Результатом расчета линии связи является вычисленное значение отношения S/N, величина которого сравнивается с соответствующими значениями по пятибалльной шкале градаций качества принимаемого ...
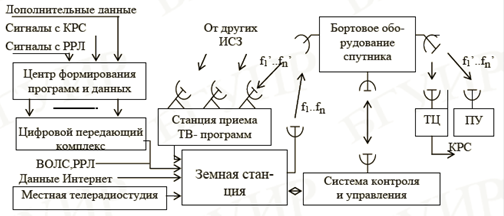
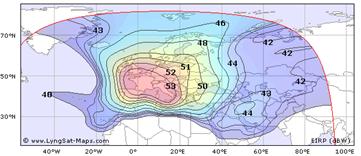
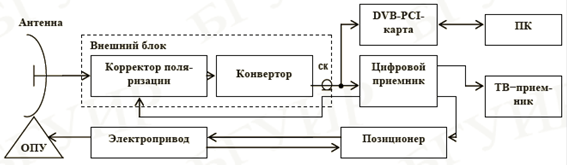
... Прием сигналов осуществляется в г. Гродно с географическими координатами ψ=53,700 с.ш., φз=23,800 в.д. с спутника HotBird 6/7A (130 з.д.) Большинство современных систем индивидуального и коллективного приёма программ спутникового вещания оснащены опорно-поворотным устройством (ОПУ) для оперативного наведения антенны на заданный ИСЗ. Наиболее простым механизмом перестройки антенны ...
... телевидения: жесткая конкуренция со стороны спутникового и кабельного ТВ; ограничения, наложенные государственными регулирующими органами на параметры передачи. Факторы, содействующие развитию цифрового телевидения: принятый срок прекращения аналогового телевизионного вещания; субсидирование абонентского приемного оборудования. До весны 2003 года компания интерактивных ...
... Изм. Лист № Докум. Подп. Дата Лист 53 6. Заключение. В данном дипломном проекте проведена модернизация управляющего блока тюнера. В базовом блоке тюнера применялось сенсорное управление с ручной настройкой на соответствующий канал. Перестройка производилась с помощью подстроечных резисторов. Все это приводило к ...
0 комментариев