Навигация
6. Синтез регуляторов.
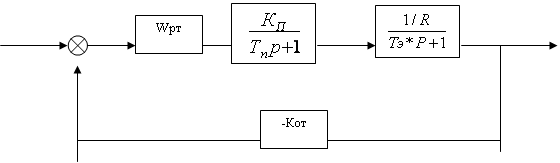
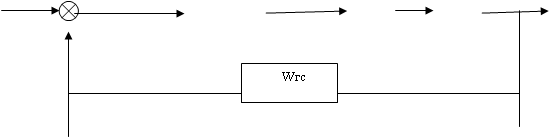
Регулятор тока якоря получает на вход сигнал задания uзт с выхода регулятора скорости и сигнал обратной связи uдт с выхода датчика тока. На выходе он формирует напряжение управления uу в СИФУ ТП, определяющее угол управления тиристоров a. Параметры регулятора выбираются по соотношениям:
R2C=Tя; R1C=Tи;
Сигнал обратной связи по току снимается с шунта, установленного в главной цепи; датчик тока осуществляет гальваническое разделение цепей управления от главных цепей и усилению по напряжению. Возможно также использование датчика тока на основе трансформаторов тока, установленных на стороне переменного тока ТП, и ключей, изменяющих полярность обратной связи при переключении выпрямительных мостов.
На регулятор тока возлагаются также другие функции: ограничение скорости нарастания тока di/dt, улучшение динамики контура тока в зоне прерывистого тока, компенсация влияния ЭДС двигателя на характеристики контура, обеспечение режима стоянки электродвигателя, управление переключением выпрямительных мостов реверсивного ТП.
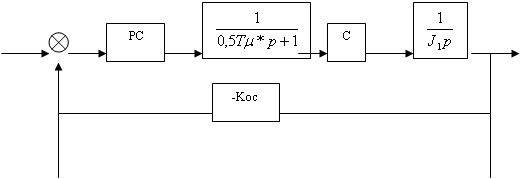
В системах подчиненного регулирования выходной сигнал регулятора скорости является сигналом задания тока uзт для регулятора тока. На регулятор скорости и связанные с ним узлы возлагаются дополнительные задачи: ограничение сигнала uзт допустимым значением, которое может зависеть от значения потока двигателя Ф, ограничение скорости изменения тока di/dt, формирование требуемой жесткости механических характеристик ЭП, прием сигналов задания скорости двигателя wдв, обеспечение изменения wдв с определенным ускорением и др.
В КТЭУ предусмотрена возможность использования двух задатчиков скорости: сельсинового командоаппарата UR и ступенчатого задатчика AQ на 3 ступени “вперед” или “назад”. Выходы этих задатчиков соединяются вместе и подаются на вход задатчика интенсивности. В каждый момент задает скорость тот задатчик, который выбран (разрешен) внешним сигналом. Имеется вход для общего запрета задания, а также конечные ограничения для хода “вперед” или “назад”. При нуле нуль-орган AU выдает сигнал, разрешающий сборку схемы.
7. Выбор защит и их уставок.
Выключатели автоматические АК-63 предназначены для отключения при перегрузках и коротких замыканиях электрических цепей напряжением постоянного тока до 440 В (однополюсные до 240 В) или переменного тока частотой 50-60 Гц до 500 В, оперативных включений и отключений (до 30 в час) этих цепей.
Механическое и коммутационное износостойкость свободных контактов выключателей – 40000 циклов. Свободные контакты включателей допукают нагрузку в продолжительном режиме током 2,5 А. Предельный ток включения 10 А. Предельный ток отключения:
постоянный при напряжении 220 В и постоянной времени цепи 0,01 с – 0,25 А;
переменный частотой 50 Гц при коэффициенте мощности 0,4: при напряжении127 В будет 2,5 А, при напряжении 220 В – 1,6 А, при напряжении 380 В – 1,0 А, при напряжении 440 В - 0,5 А.
Реле электромагнитные РЭВ800 применяют в схемах автоматического управления в качестве электромагнитных реле времени, контроля тока, контроля напряжения и промежуточных, они пригодны для работы прерывесто-продолжительном и повторно-кратковременном режимах.
Реле контроля напряжения и промежуточные РЭВ821, РЭВ822, РЭВ825, РЭВ826 изготовляют с втягивающими катушками на номинальные напряжения 24, 48, 110 и 220 В. Масса реле не более 5 кг.
Реле минимального тока РЭВ830 изготовляют с втягивающими катушками на номинальные токи 0,6; 1; 1,6; 2,5; 4; 6; 10; 16; 25; 40; 63; 100; 160; 250; 320; 400 и 630 А. Конструкция реле допускает применение токовых катушек на большие значения номинальных при сохранении номинального значения МДС, равного 2400 А. Реле регулируют на ток втягивания в пределах 30-80 %. Коэффициент возвратареле не номинируется и состовляет ориентировочно 0,3. Реле имеет один замыкающий, один размыкающий контакты. По условиям динамической устойчивости втягивающая катушка тока обеспечивает протекание 10-кратного по отношению к номинальному тока в течение 0,5 с. Номинальный ток контактов 10 А.
Контакторы однополюсные постоянного тока типа КП207 предназначенны для коммутирования силовых электрических цепей генераторов и электродвигателей постоянного тока при номинальном напряжении 600 В. Они исполняются с замыкающими главными контактами. Контактор КП207 отличается от соответствующего исполнения контактора КП7 наличием отключающих пружин. Номинальный ток контактора КП207У3 2500 А, номинальное напряжение 600 В. Контакторы расчитанны на продолжительный режим работы при номинальном токе. Предельно допустимое число включений в час – 30. Собственное время срабатывания контактора КП207 (с учетом реле форсировки) замыкания – 0,25 с, размыкания – 0,05-0,08 с. Контакторы могут изготовляться со встроенным максимальным реле, имеющим один замыкающий и один размыкающий контакты. Установки тока срабатывания максимального реле контактора КП207У3 1250, 1600, 2500, 3750, 5000 А. Контакторы имеют три замыкающих и три размыкающих вспомогательных контакта, из которых один размыкающий контакт задействован в цепи форсировки катушки. Для расширения диапазона регулирования и повышения точности используются замкнутые системы регулирования. Идея замкнутых систем регулирования сводится к тому, что в системе автоматически компенсируется воздействие возмущающих факторов и угловая скорость или момент двигателя могут с большей точностью поддерживаться на требуемом уровне.
Обратные связи делятся на жесткие и гибкие. Жесткие связи действуют как в переходном, так и в установившемся режимах работы, гибкие – только в переходном режиме. Различают положительные и отрицательные обратные связи. При увеличении регулируемой величины положительная связь еще больше ее увеличивает, а отрицательная, наоборот, уменьшает. Обратные связи могут передавать сигналы, пропорциональные значению или производной (иногда интегралу) от значения напряжения, тока (или момента), скорости, угла поворота и т. п. В этих случаях они называются ( жесткими или гибкими, положительными или отрицательными) обратными связями соответственно по напряжению, току, скорости, углу.
Для осуществления автоматического регулирования необходимо измерить сигнал обратной связи, затем этот результат в виде напряжения сравнить ( произвести алгебраическое суммирование) с заданным в виде напряжения значением регулируемой величины и направить результат сравнения регулируемому объекту. Обычно энергии измерительного органа оказывается недостаточно для воздействия на регулирующий орган, поэтому возникает необходимость в применении усилительного устройства. Перечисленные элементы (измерительный орган, усилитель и регулирующий орган) входят в устройство регулятора, осуществляющего процесс регулирования.
Таким образом, система автоматического регулирования состоит из регулируемого объекта и регулятора, реагирующего на изменение регулируемой величины.
Ограничение момента, развиваемого приводом, до требуемого значения с определенной точностью может произойти, например, при снижении ЭДС преобразователя, питающего якорь двигателя постоянного тока независимого возбуждения. Автоматически это выполняется при использовании соответствующей обратной связи. В данном случае целесообразно применить отрицательную обратную связь по току, которая вступает в действие при достижении током ( или моментом при Ф = const) заданного значения.
8. Построение статических характеристик замкнутой системы электропривода.
Для построения статических характеристик воспользуемся передаточными функциями электропривода по контурам U®w и Мс®w:
Построение
естественной
характеристики
двигателя будем
вести по двум
точкам – при
работе двигателя
на холостом
ходу и в номинальном
режиме. При
работе двигателя
на холостом
ходу отсутствует
воздействие
по каналу возмущения,
поэтому расчет
ведем только
по каналу задания.
В статическом
режиме оператор
p=0.
Передаточная
функция по
каналу задания
будет иметь
вид:![]()

Значения скорости холостого хода при номинальном напряжении определяется:
w0=Wu®w(p)ЧUн=0,5089Ч220=111,96 рад/с.
Падение скорости при номинальном моменте Dw определяется сигналом по возмущающему воздействию:

Dw= WM®w(p)ЧMc=0,0166.Ч716,25=11,89 рад/с;
Значение скорости при номинальном моменте равноwн=w0-Dw=111,98-11,89=100,1 рад/с;
Построение основной характеристики ЭП. Строим также по двум точкам – при моменте номинальном и при М=0.Скорость холостого хода остаётся неизменной (w0=111,96 рад/с), а падение скорости Dw изменится, так как увеличится сопротивление якорной цепи, что уменьшит жесткость характеристики.

Падение скорости равно (Dw):
Dw=WMc®w(p)ЧMн=0,0295Ч430=12,66 рад/с.
Значение скорости при номинальном моменте (wн):wн=w0-Dw=112,8-12,66=100,14 рад/с.
Статическую характеристику замкнутой системы построим по двум точкам, используя значение номинальной скорости и жёсткости.
wн=104,7 рад/с,

где: w0з – скорость холостого хода замкнутой системы.
Похожие работы

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
... и микро-ЭВМ и т. п. Современные регулируемые электроприводы для автоматических линий и механизмов обычно строятся на полупроводниковых устройствах. На релейно-контакторную аппаратуру в таких приводах обычно возлагаются функции включения питания (подсоединение к сети) силовых блоков и блоков управления, защиты и ввода первоначальных и конечных команд в систему управления приводом. Но наряду с ...
... равное отношению угловой частоты ЭДС ротора Ω2 (приведенной к двухполюсному электродвигателю) к номинальному значению угловой частоты напряжения статора Ω1н. . Структурная схема асинхронного электродвигателя при управлении напряжением статора показана на рис. 2. Рис.2. 2.3 Статические характеристики САУ на основе АД 2.3.1 Статические характеристики САУ при Для ...
0 комментариев