Навигация
Проектирование цифровой следящей системы
33627
знаков
6
таблиц
3
изображения
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к курсовой работе
по курсу
“Теория автоматического управления”
для студентов специальности 7.091 401
560 IF S = 2 THEN T(3) = .8 * T(3)
570 IF S > 2 THEN T(3) = .7 * T(3)
580 X3 = LOG(1 / T(3))
590 PRINT "T(1)="; T(1); "T(2)="; T(2); "T(3)="; T(3)
600 PRINT "Cкобка в знаменателе (Т(3)*Р+1) должна возводиться в степень (n-m)"
610 PRINT "n-m="; S
620 FOR I = 1 TO M
630 K = 3 + M
640 PRINT "T("; K; ")="; T(K)
650 NEXT I
660 PRINT "Wc="; OC; "LgWc="; XC
670 PRINT "Lg(1/T1)="; X1; "Lg(1/T2)="; X2; "Lg(1/T3)="; X3
680 END
О Г Л А В Л Е Н И Е
1. Введение
2. ЗАДАНИЕ НА ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ
3. ПОРЯДОК РАСЧЕТА СЛЕДЯЩЕЙ СИСТЕМЫ
3.1. Разработка функциональной схемы.
3.2. Выбор исполнительного двигателя.
3.3. Выбор усилителя мощности.
3.4. Составление передаточных функций элементов следящей системы
3.5. Расчет последовательного непрерывного корректирующего звена методом ЛАЧХ
3.6. Моделирование следящей системы с непрерывным последовательным корректирующим звеном
3.7. Определение дискретной передаточной функции корректирующего звена
3.8. Моделирование цифровой следящей системы.
3.9. Получение рекуррентного уравнения цифрового корректирующего звена.
3.10. Разработка принципиальной схемы цифровой следящей системы.
ПРИЛОЖЕНИЯ
1. Введение
Цель курсовой работы - получить навыки расчета линейных систем автоматического управления с цифровым корректирующим звеном, роль которого может выполнять микропроцессор, управляющая вычислительная машина, или любое специализированное цифровое управляющее устройство.
В соответствии с заданием необходимо разработать следящую систему, удовлетворяющую определенным техническим условиям. Система должна обеспечивать синхронное и синфазное вращение двух осей, механически не связанных между собой. Входом системы является угол поворота сельсина-датчика, а выходом - угол поворота выходного вала редуктора, механически связанного с рабочим механизмом и с ротором сельсина-приемника.
Следящие системы рассматриваемого типа широко применяются для дистанционного управления различными механизмами, а также при построении автоматических систем управления в различных отраслях промышленности.
Для обеспечения заданных показателей качества переходного процесса в систему вводится цифровое управляющее (корректирующее) звено. Расчет корректирующего звена проводится методом логарифмических частотных характеристик, разработанным для расчета непрерывных систем управления. Использование данного метода для расчета цифрового корректирующего звена основано на предположении о том, что при малом периоде квантования по времени цифровая система по своим свойствам приближается к непрерывной, а при достаточно большом числе цифровых разрядов вычислительного устройства нелинейностью, вносимой квантованием сигналов по уровню, можно пренебречь. Современный уровень развития цифровой вычислительной техники позволяет применять в управляющем вычислительном устройстве период квантования непрерывных сигналов по времени порядка 0,01-0,001с. , что обычно является вполне достаточным для обеспечения адекватности по динамическим свойствам цифровой и непрерывной систем.
190 PRINT "Введите величину макс. перерегулирования"
200 PRINT "Сигма макс.,% ="
210 INPUT SM
220 IF SM = 10 THEN C = 5: L1 = 18
230 IF SM = 15 THEN C = 4.4: L1 = 15
240 IF SM = 20 THEN C = 4: L1 = 13.5
250 IF SM = 25 THEN C = 3.6: L1 = 12
260 IF SM = 30 THEN C = 3.2: L1 = 11
270 IF SM = 35 THEN C = 3: L1 = 10.5
280 IF SM = 40 THEN C = 2.8: L1 = 10
290 PRINT "Порядок астатизма NU="
300 INPUT NU
310 PRINT "Коэффициент усиления желаемой системы Кс="
320 INPUT KC
330 PRINT "Время регулирования TR="
340 INPUT TR
350 M1 = .434
360 OC = C * 3.14 / TR
370 XC = LOG(OC) * M1
380 B = 20 * XC
390 X2 = (B - L1) / 20
400 T(2) = 1 / (10 ^ X2)
410 A = 20 * LOG(KC) * M1
420 X1 = (L1 + 40 * X2 - A) / 20
430 T(1) = 1 / (10 ^ X1)
440 X3 = (L1 + 20 * XC) / 20
450 T(3) = 1 / 10 ^ X3
460 IF NU = 1 THEN GOTO 490
470 X1 = (40 * X2 + L1 - A) / 40
480 T(1) = 1 / (10 ^ X1)
490 M = 0
510 FOR I = 1 TO N
520 IF T3(I) <= T(3) * .75 THEN M = M + 1: T(3 + M) = T3(I)
540 NEXT I
550 S = N - M
2330 PRINT "T2("; I; ")="
2340 INPUT T(I)
2350 NEXT I
2420 GOTO 2120
Приложение 5Программа LOGHAR. doc
Определение постоянных времени
передаточной функции желаемой системы
10 PRINT "Определение пост. времени передат. функции желаемой системы"
20 PRINT "Искомая перед. ф-ция имеет вид:"
30 PRINT " Kc(T(2)*P+1)/((T(1)*P+1)*(T(3)*P+1)^(n- m)*(T(4)P+1)*..(T(m+3)P+1)*P)"
40 PRINT "n-степень полинома Q(P) - знаменателя перед. ф-ции заданной сист."
50 PRINT "m-количество пост. времени Q(P), меньших, чем Т(3)"
60 PRINT "Q(P)=(Tз(1)*P+1)*(Tз(2)*P+1)*...*(Tз(N)*P+1)"
70 PRINT "Введите порядок полинома знаменателя Q(P) заданной перед. ф-кции"
80 PRINT "N="
90 INPUT N
100 DIM T3(5), T(8)
110 FOR I = 1 TO 8
120 T(I) = 0
130 NEXT I
140 PRINT "Введите пост. времени знаменат. заданной перед. ф-ции Q(P)"
150 FOR I = 1 TO N
160 PRINT "Tз("; I; ")="
170 INPUT T3(I)
180 NEXT I
2. ЗАДАНИЕ НА ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ
2.1. Цель курсовой работы - проектирование следящей системы, удовлетворяющей заданным техническим условиям.
2.2. Измерительное устройство - сельсинная пара.
2.3. Исполнительный двигатель - двигатель постоянного тока серии МИ.
2.4. Усилитель мощности - электромашинный усилитель с поперечным полем.
2.5. Исходные данные для проектирования системы.
2.5.1. Статический момент нагрузки объекта управления
- Mос, Н.м.
2.5.2. Момент инерции объекта управления - Jо, кг.м2
2.5.3. Максимальная угловая скорость объекта
управления -
wо max.
2.5.4. Максимальное угловое ускорение объекта
управления
- eо max.
2.5.5. Требования, предъявляемые к качеству процесса управления:
максимальное перерегулирование - s max,%;
время регулирования
- tр, с;
максимальная кинетическая ошибка - xmax, рад.
Варианты исходных данных приведены в прил. 1.
2.6. Курсовая работа должна содержать следующие разделы.
2.6.1. Разработка функциональной схемы.
2.6.2. Выбор элементов системы - исполнительного двигателя (серии МИ) и электромашинного усилителя мощности (ЭМУ), расчет передаточного числа редуктора.
2.6.3. Составление передаточных функций элементов нескорректированной следящей системы.
2.6.4. Построение логарифмических частотных характеристик (ЛАЧХ ) нескорректированной системы, желаемой системы и последовательного корректирующего звена.
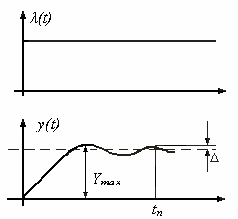
2.6.5. Построение на ЭВМ переходной функции H(t) и определение по ней показателей качества переходного процесса для системы с непрерывным последовательным корректирующим звеном.
2.6.6. Определение дискретной передаточной функции последовательного корректирующего звена по его непрерывной передаточной функции.
2.6.7. Построение на ЭВМ переходной функции H(t) и определение по ней показателей качества переходного процесса для системы с дискретным корректирующим звеном.
2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена.
2.6.9. Разработка принципиальной схемы цифровой следящей системы.
2.7. Расчетно-пояснительная записка должна содержать следующие разделы.
2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее работы, описание функциональной схемы системы).
2.7.2. Исходные данные для проектирования системы.
2.7.3. Расчетная часть.
2.7.4. Заключение (основные характеристики спроектированной системы).
2.7.5. Список литературы.
2.8. Расчетно-пояснительная записка должна включать в себя функциональную, структурную и принципиальную электрические схемы следящей системы; ЛАЧХ и ЛФЧХ скорректированной и нескорректированной системы, графики переходных функций системы с непрерывным и с дискретным корректирующим звеном, другие рисунки, таблицы и графики, необходимые для выполнения данной работы.
2.9. Записка должна быть оформлена в соответствии с требованиями ЕСКД (написана черными чернилами или пастой, либо отпечатана на принтере на листах формата 11). Ориентировочный объем записки - 25 - 30 страниц.
620 GOTO 270
630 FOR I = 0 TO N
640 PRINT "S("; I; ")="; S1(I); TAB(40); "G("; I; ")="; S(I)
650 NEXT I
660 END
2060 L = 1
2070 PRINT "Введите постоянные времени числителя T1(I)"
2080 FOR I = 1 TO N
2090 PRINT "T1("; I; ")="
2100 INPUT T(I)
2110 NEXT I
2112 PRINT "Введите коэффициент K"
2114 PRINT "K="
2116 INPUT K
2120 A(0) = 1
2130 A(1) = T(1) + T(2) + T(3) + T(4) + T(5)
2140 X1 = T(1) * T(2) + T(1) * T(3) + T(1) * T(4) + T(1) * T(5)
2150 X2 = T(2) * T(3) + T(2) * T(4) + T(2) * T(5)
2160 X3 = T(3) * T(4) + T(3) * T(5) + T(4) * T(5)
2170 A(2) = X1 + X2 + X3
2180 X1 = T(1) * T(2) * T(3) + T(1) * T(2) * T(4) + T(1) * T(2) * T(5)
2190 X2 = T(1) * T(3) * T(4) + T(1) * T(3) * T(5) + T(1) * T(4) * T(5)
2200 X3 = T(2) * T(3) * T(4) + T(2) * T(3) * T(5) + T(3) * T(4) * T(5)
2210 A(3) = X1 + X2 + X3 + T(2) * T(4) * T(5)
2220 X1 = T(1) * T(2) * T(3) * T(4) + T(1) * T(2) * T(3) * T(5)
2230 X2 = T(1) * T(2) * T(4) * T(5) + T(1) * T(3) * T(4) * T(5)
2240 A(4) = X1 + X2 + T(2) * T(3) * T(4) * T(5)
2250 A(5) = T(1) * T(2) * T(3) * T(4) * T(5)
2260 IF L = 2 GOTO 240
2270 FOR I = 0 TO N
2280 B(I) = A(I) * K
2290 NEXT I
2300 L = 2
2310 PRINT "Введите постоянные времени знаменателя T2(I)"
2320 FOR I = 1 TO N
280 V2 = 4 * B(2) * T ^ (N - 2)
290 V3 = 8 * B(3) * T ^ (N - 3): V4 = 16 * B(4) * T ^ (N - 4)
300 V5 = 32 * B(5)
310 S(N) = V0 + V1 + V2 + V3 + V4 + V5
320 X1 = V0 * N + V1 * (N - 2) + V2 * (N - 4)
330 X2 = V3 * (N - 6) + V4 * (N - 8) - 5 * V5
340 S(N - 1) = X1 + X2
350 X1 = V0 * N * (N - 1) / 2 + V1 * (N - 1) * (N - 4) / 2
360 X2 = V2 * ((N - 2) * (N - 7) + 2) / 2
370 X3 = V3 * ((N - 3) * (N - 10) + 6) / 2
380 X4 = V4 * (22 - 4 * N) + 10 * V5
390 S(N - 2) = X1 + X2 + X3 + X4
400 X0 = V0 * N * (N - 1) * (N - 2) / 6
410 X1 = V1 * (N - 1) * (N - 2) * (N - 6) / 6
420 X2 = V2 * ((N - 2) * (N - 3) * (N - 10) + 6 * (N - 2)) / 6
430 X3 = V3 * (3 * (N - 3) * (6 - N) - 2) / 2
440 X4 = V4 * (6 * N - 28) - 10 * V5
445 IF N < 3 GOTO 550
450 S(N - 3) = X0 + X1 + X2 + X3 + X4
460 X0 = V0 * N * (N - 1) * (N - 2) * (N - 3) / 24
470 X1 = V1 * (N - 1) * (N - 2) * (N - 3) * (N - 8) / 24
480 X2 = V2 * (N - 2) * (N - 3) * (3 - 2 * (N - 4)) / 6
490 X3 = V3 * (N - 3) * (3 * (N - 4) - 2) / 2
500 X4 = V4 * (17 - 4 * N) + 5 * V5
510 IF N < 4 GOTO 550
520 S(N - 4) = X0 + X1 + X2 + X3 + X4
530 IF N < 5 GOTO 550
540 S(N - 5) = V0 - V1 + V2 - V3 + V4 - V5
550 IF R = 2 GOTO 630
560 FOR I = 0 TO N
570 B1(I) = B(I)
580 B(I) = A(I)
590 S1(I) = S(I)
600 NEXT I
610 R = 2
3. ПОРЯДОК РАСЧЕТА СЛЕДЯЩЕЙ СИСТЕМЫ
3.1. Разработка функциональной схемы
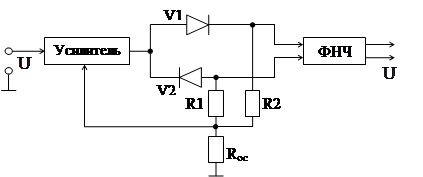
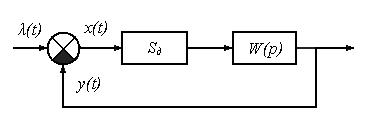
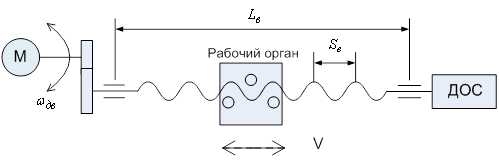
В проектируемой следящей системе в качестве исполнительного двигателя (Д) должен быть использован двигатель постоянного тока серии МИ, в качестве усилителя мощности - электромашинный усилитель с поперечным полем (ЭМУ). Для измерительного устройства (ИУ) рекомендуется использовать сельсинную пару: сельсин-датчик и сельсин-трансформатор (приемник). Так как измерительное устройство работает на переменном токе, а усилитель мощности и исполнительный двигатель - на постоянном токе, то после измерительного устройства должен быть применен фазовый детектор (ФД). Кроме указанных элементов в функциональную схему входят корректирующее устройство (КУ), усилитель напряжения (У), редуктор (Р), посредством которого исполнительный двигатель соединяется с объектом управления и ротором сельсина-трансформатора, и объект управления (ОУ). Корректирующее устройство представлено тремя блоками: аналого-цифровой преобразователь (АЦП), вычислитель (В) и цифро-аналоговый преобразователь (ЦАП).
Функциональная схема цифровой следящей системы приведена на рис.1.
|
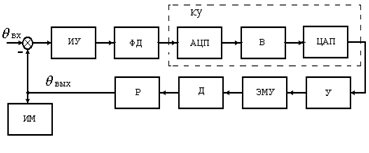
Рис.1. Функциональная схема цифровой следящей системы
Похожие работы
... универсальный вольтметр В7-25. Он имеет диапазон измеряемых от 1 мкВ до 100 В, основную погрешность , , подавление помех на 70 дБ. Цифровые вольтметры переменного тока Как мы уже отмечали ранее, ЦВ встречаются в пределах каждого вида вольтметров, в том числе и предназначенных для измерения напряжений переменного и импульсного токов, видов ВЗ, В4 и В7. Таким образом, входной величиной АЦП в ...
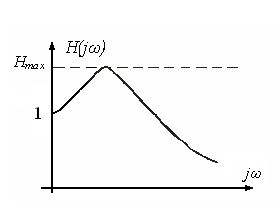
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев