Навигация
Получение рекуррентного уравнения
33627
знаков
6
таблиц
3
изображения
3.9. Получение рекуррентного уравнения
цифрового корректирующего звена
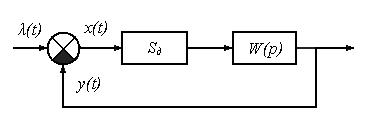
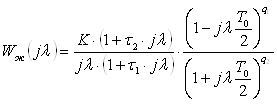
Пусть дискретная передаточная функция имеет вид (3). Уравнение (3) запишем следующим образом:
![]() , (5)
, (5)
где U(Z) - Z-изображение выходной величины цифрового корректирующего устройства;
X(Z) - Z-изображение входной величины корректирующего устройства.
Перепишем уравнение (5), избавившись от знаменателя в левой и правой частях:
U(Z)(G0+G1Z+...+GnZn)=X(Z)(S0+S1Z+...+SmZm) . (6)
Раскрыв скобки, поделив левую и правую части уравнения на Zn и перейдя от изображений к оригиналам, получим:
G0U[k-n]+G1U[k-n+1]+...+GnU[k]=
=S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m]
здесь X[k] , U[k] -
значения входной и выходной величин в произвольный такт времени k , X[k-1], X[k-2] . . ., U[k-1], U[k-2] . . . - значения входной и выходной величин в предшествующие
3.5.2. Построение желаемой ЛАЧХ
При построении желаемой ЛАЧХ выделяют три области: область низких частот, область средних частот и область высоких частот. Вид ЛАЧХ в каждой из областей по разному влияет на качество системы. В области низких частот вид ЛАЧХ определяет точность работы системы в установившихся режимах. Область средних частот определяет динамические свойства системы (быстродействие, колебательность). Вид ЛАЧХ в области высоких частот практически мало влияет на качество системы.
Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности.
По заданным величинам smax и tр определяем с помощью табл. 1 частоту среза wс .
Например, пусть задано, что smax=30 % , tр=1,5 с. Из табл.1 для smax =30% определяем tрwс/p=3,2, откуда следует:
wс= 3,2p/1,5=6,7 c-1 .
Таблица 1
| smax , % | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| tрwс/p | 5 | 4,4 | 4 | 3,6 | 3,2 | 3 | 2,8 |
| L1, дБ | 18 | 15 | 13,5 | 12 | 11 | 10,5 | 10 |
| q, гр | 85 | 80 | 65 | 55 | 45 | 40 | 35 |
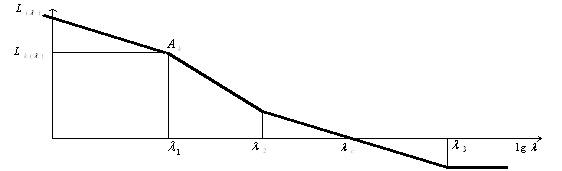
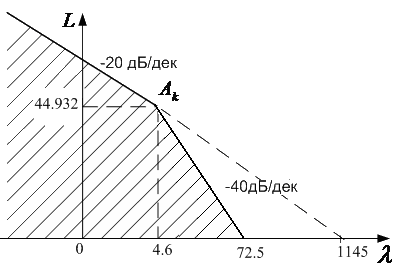
Наносим на ось абсцисс частоту среза wс и проводим через нее прямую линию с наклоном -20 дБ/дек (рис.3).
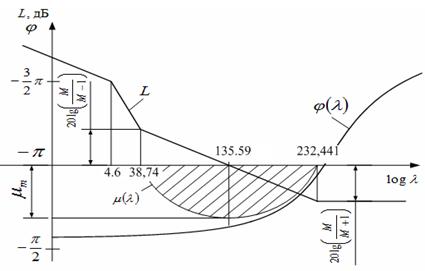
Частота w2 , ограничивающая область средних частот желаемой ЛАЧХ слева определяется величиной отрезка L1, которая может быть найдена в зависимости от заданной величины smax из табл.1. Частота w3, ограничивающая область средних частот справа, определяется величиной отрезка L2, при этом ![]() .
.
В области высоких частот желаемую ЛАЧХ нужно строить в виде прямолинейных отрезков с наклоном, кратным -20 дБ/дек. (т.е. -40, - 60, -80 и т.д.) , таким образом, чтобы разность характеристик желаемой и заданной в пределе при w ® ¥ составляла прямую линию, параллельную оси частот.
В области низких частот желаемая ЛАЧХ строится следующим образом. По заданной величине коэффициента усиления системы Кс=wоmax/xmax
определяем величину LA2=20LgKc и отмечаем на чертеже точку A2 c координатами wA2=1 c-1 и LA2 (cм. рис.3). Через точку A2 проводим прямую линию с наклоном -20 дБ/дек.
От точки М, ограничивающей область средних частот слева, проводим прямую линию с наклоном -40дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
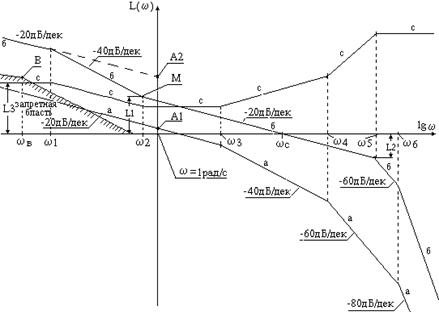
Рис.3. а-а-а . . . - ЛАЧХ заданной (неизменяемой части) системы;
б-б-б . . . - ЛАЧХ желаемая;
с-с-с . . . - ЛАЧХ последовательного корректирующего звена
Порядок полинома знаменателя n должен быть не меньше порядка полинома числителя и не больше 5.
В программу нужно ввести также период квантования по времени Т0. Как уже было сказано ранее, чем меньше Т0 , тем более дискретная система приближается по своим свойствам к непрерывной. Однако при слишком малых значениях Т0 процессор в реальной системе может не успевать выполнять все необходимые вычисления. Кроме того, при уменьшении Т0 увеличивается число шагов переходного процесса. Так как вычисления проводятся по рекуррентным формулам, неизбежные ошибки вычислений накапливаются от шага к шагу и при чрезмерно большом числе шагов ошибка вычислений может превысить допустимую величину (система может оказаться неустойчивой, либо с неудовлетворительным качеством переходного процесса). В силу сказанного, Т0 не должно быть слишком мало. Рекомендуется выбирать Т0 в пределах (0,1 - 0,01)/wc , где wс - частота среза скорректированной системы.
Похожие работы
... универсальный вольтметр В7-25. Он имеет диапазон измеряемых от 1 мкВ до 100 В, основную погрешность , , подавление помех на 70 дБ. Цифровые вольтметры переменного тока Как мы уже отмечали ранее, ЦВ встречаются в пределах каждого вида вольтметров, в том числе и предназначенных для измерения напряжений переменного и импульсного токов, видов ВЗ, В4 и В7. Таким образом, входной величиной АЦП в ...
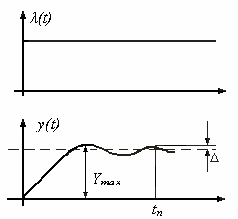
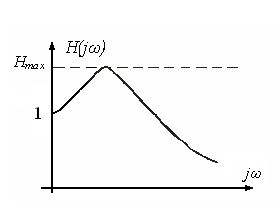
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев