Навигация
Выбор и обоснование тактико-технических характеристик РЛС. Разработка структурной схемы
45419
знаков
3
таблицы
4
изображения
Министерство образования Украины
Национальный авиационный университет

Теоретические основы радиолокации
Выбор и обоснование тактико-технических характеристик РЛС. Разработка структурной
схемы
Выполнил студент Принял:
Группы: 404 Соколов П.М.
Факультета радиолэектроники
Черныш Александр Александрович
Киев 2002
Содержание:
1. Задание:........................................................................................................................................... 3
2. Введение......................................................................................................................................... 4
3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 6
3.1. Обоснование, выбор и расчет тактических характеристик РЛС...................................... 6
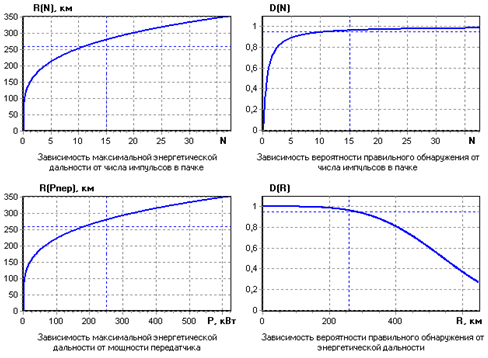
3.1.1. Максимальная дальность действия Rmax....................................................................... 6
3.1.2. Минимальная дальность действия РЛС Rmin................................................................ 6
3.1.3. Разрешающая способность РЛС по дальности DR..................................................... 7
3.1.4. Разрешающая способность РЛС по азимуту Da на средней дальности.................. 7
3.1.5. Период обзора Тобз............................................................................................................ 8
3.1.6. Разрешающая способность по углу места.................................................................... 8
3.1.7. Секторы обзора по азимуту Daобз и по углу места Dbобз....................................... 8
3.1.8. Точность определения координат по дальности Grn................................................. 8
3.1.10. Вероятность правильного обнаружения D:............................................................... 9
3.1.11. Вероятность ложной тревоги F............................................................................... 10
3.2. Обоснование, выбор и расчет технических характеристик РЛС.................................... 10
3.2.1. Режим работы РЛС..................................................................................................... 10
3.2.2. Рабочая длина волны l.................................................................................................. 10
3.2.3. Частота повторения зондирующих импульсов Fn.................................................... 10
3.2.4. Длительность зондирующего импульса tu.................................................................. 10
3.2.5. Форма и ширина диаграммы направленности............................................................ 11
3.2.6. Необходимый диаметр антенны................................................................................. 11
3.2.7. КНД и усиления антенны, эффективная площадь антенны..................................... 11
3.2.8. Скорость вращения антенны Ωа.................................................................................. 12
3.2.9. Количество импульсов в пакете Nu............................................................................. 12
3.2.10. Чувствительность приемника Pnmin....................................................................... 12
3.2.11. Оцениваем эффективную отражающую поверхность цели.................................. 13
3.2.12. Влияние затухания a................................................................................................... 13
3.2.13.Импульсная мощность излучения Pu.......................................................................... 15
3.2.14. Средняя мощность излучения Pср передатчика...................................................... 15
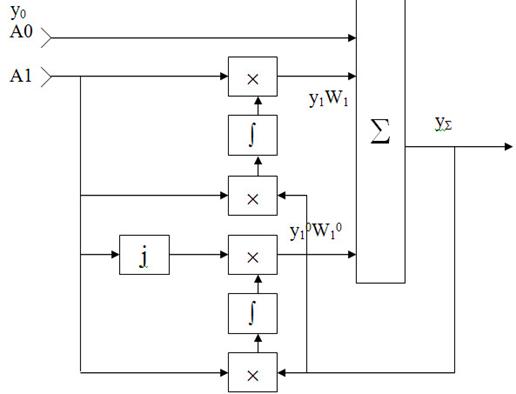
4. Описание обобщённой структурной схемы РЛС..................................................................... 15
5. Структурная схема метеонавигационных радиолокаторов типа «Гроза»............................. 17
6. Заключение................................................................................................................................... 20
7. Список использованной литературы:........................................................................................ 21
1. Задание:
Необходимо рассчитать тактико-технические характеристики радиолокационной станции, используя нормы и рекомендации ICAO, государственные и международные стандарты, выбрать недостающие технические и тактические характеристики, обосновать их выбор, а также разработать структурную схему РЛС.
Исходные данные:
¨ Период обзора ……………………………………………………………..Тобз=5с
¨ Сектор обзора в горизонтальной плоскости,…………………………….Daобз = ±1000;
¨ Ширина ДНА РЛС в вертикальной плоскости,………………….………Db=350;
¨ Диаметр пятна ЭЛТ, ………………………………………………………dn=0,5мм;
¨ Максимальная дальность действия РЛС,…………………………………Rmax = 400·103м;
¨ Длительность импульса,…………………………………………………...tu = 1,5Ч10-6c;
¨ Ширина ДНА в горизонтальной плоскости,……………………………..q = 3°;
¨ Вероятность правильного обнаружения,…………………………………D = 0,5;
¨ Вероятность ложной тревоги,……………………………………………..F = 10-9;
¨ Коэффициент шума,.……………………………………………………….Nш = 10dB;
¨ Эффективная отражающая поверхность цели,…………………………..Sэф = 40м2;
¨ Диаметр экрана ЭЛТ,………………………………………………………Dэ = 0,25м.
ДНА – диаграмма направленности антенны.
2. Введение
Радиолокация – область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды (диэлектрической и магнитной проницаемостей, проводимости), в которой распространяется первичная волна. Сюда относятся летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т. п. Особым видом радиолокационных целей являются астрономические объекты.
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
1. Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания – зондирующий сигнал – отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. Такой вид наблюдения иногда называют также активной радиолокацией с пассивным ответом.
2. Радиолокация с активным ответом, именуемая активной радиолокацией с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика – ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения.
3. Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов. Если зондирующий сигнал в двух предыдущих случаях может быть использован как опорный, что обеспечивает принципиальную возможность измерения дальность и скорости, то в данном случае такая возможность отсутствует.
Систему РЛС можно рассматривать как радиолокационный канал наподобие радиоканалов связи или телеметрии. Основными составными частями РЛС являются передатчик, приемник, антенное устройство, оконечное устройство.
Большинство РЛС с импульсной модуляцией имеет одну антенну, снабженную специальным антенным переключателем для перехода из режима передачи в режим приема и наоборот.
Передатчик РЛС вырабатывает высокочастотные колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания подаются в антенное устройство и образуют зондирующий сигнал. Наибольшее применение находит зондирующий сигнал в виде последовательности равноотстоящих по времени коротких радиоимпульсов. Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и др.
Излучаемые колебания нельзя считать радиолокационным сигналом, так как они никакой информации о цели не несут. После того, как электромагнитная волна, падающая на цель, вызывает в ее теле вынужденные колебания электрических зарядов, цель, подобно обычной антенне создает свое электромагнитное поле. Это поле в дальней зоне представляет собой вторичную, то есть отраженную волну, создающую в РЛС радиолокационный сигнал, который является носителем информации о цели. Так амплитуда сигнала в определенной степени характеризует размеры и отражающие свойства цели, время запаздывания относительно начала излучения зондирующего сигнала используется для измерения дальности, а частота колебаний благодаря эффекту Доплера несет информацию о радиальной скорости цели. Поляризационные параметры отраженной волны могут также быть использованы для оценки свойств цели. Наконец, направление прихода отраженной волны содержит информацию об угловых координатах цели.
Приемник РЛС необходим для оптимального выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Для потребителя в виде вычислительного устройства непрерывного действия оконечным является устройство автоматического сопровождения цели по измеряемому параметру (дальность, угловые координаты, скорость), и полезная информация выдается в виде напряжений или токов, функционально связанных с этими параметрами. Если же оконечным устройством является ЭВМ, то радиолокационная информация преобразовывается в двоичный код. При этом в ЭВМ происходит дальнейшая, так называемая вторичная обработка сигнала.
Важной составной частью радиолокационного канала, как и любого радиоканала, являются радиопомехи. Внутренние шумы вызывают подавление полезного сигнала, а также появление ложного сигнала и вносят ошибки в измерение координаты. Наряду с этим флуктуации скорости распространения радиоволн в атмосфере, а также случайное изменение их траектории вследствие рефракции следует рассматривать как помехи. Такое же действие оказывают пассивные помехи – источники ложных отражений (например, отражения от земной поверхности при наблюдении целей). Другим источником помех являются флуктуации центра масс движущейся цели относительно траектории движения. Источники мешающих радиоизлучений образуют активные помехи (против РЛС военного назначения могут специально создаваться организованные активные помехи, возможны также организованные пассивные помехи).
В условиях большой насыщенности радиосредствами заметное влияние могут оказывать активные взаимные помехи.
Главные этапы радиолокационного наблюдения – это обнаружение, измерение, разрешение и распознавание.
Обнаружением называется процесс принятия решения о наличии целей с допустимой вероятностью ошибочного решения.
Измерение позволяет оценить координаты целей и параметры их движения с допустимыми погрешностями.
Разрешение заключается в выполнении задач обнаружения и измерения координат одной цели при наличии других, близко расположенных по дальности, скорости и т. д. Наконец
Распознавание дает возможность установить некоторые характерные признаки цели: точечная она или групповая, движущаяся или групповая и т. д.
Радиолокационная информация, поступающая от РЛС, транслируется по радиоканалу или по кабелю на пункт управления. Процесс слежения РЛС за отдельными целями автоматизирован и осуществляется с помощью ЭВМ.
Навигация самолетов по трассе обеспечивается посредством таких же РЛС, которые применяются в УВД. Они используются как для контроля выдерживания заданной трассы, так и для определения местоположения в процессе полета.
Для выполнения посадки и ее автоматизации наряду с радиомаячными системами широко используются РЛС посадки, обеспечивающие слежение за отклонением самолета от курса и глиссады планирования.
В гражданской авиации используют также ряд бортовых радиолокационных устройств. Сюда, прежде всего, относится ботовая РЛС для обнаружения опасных метеообразований и препятствий. Обычно она же служит для обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам.
3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит от многих технических характеристик РЛС, условий распространения радиоволн и характеристик целей, которые в реальных условиях использования станций подвержены случайным изменениям. Поэтому максимальная дальность действия является вероятностной характеристикой.
Уравнение дальности в свободном пространстве (т. е. без учета влияния земли и поглощения в атмосфере) для точечной цели устанавливает связь между всеми основными параметрами РЛС.
 (1)
(1)
где:
Pu - мощность излучения;
Da - коэффициент направленного действия антенны;
Sa - эффективная площадь антенны;
Sэф - эффективная отражающая поверхность цели;
Pnmin - чувствительность приемника.
Максимальная дальность действия РЛС задана в условии и равна:
Rmax = 450·103 м.
3.1.2. Минимальная дальность действия РЛС RminМинимальная дальность обнаружения станции зависит от пределов работы антенной системы по углу места. Она различна для разных частот и определяет величину мертвой зоны. В наземных РЛС при малых углах места реальное значение Rmin ограничивается влиянием местных предметов, определяющих углы закрытия, которые, в свою очередь, ограничивают возможность наблюдения низколетящих целей.
Если антенная система не вносит ограничений, то минимальная дальность действия РЛС определяется длительностью импульса tu и временем восстановления антенного переключателя tb.
![]() (2)
(2)
![]() 0,5∙3∙108∙(1,5∙10-6+0,2∙1,7∙10-6) =306 м
0,5∙3∙108∙(1,5∙10-6+0,2∙1,7∙10-6) =306 м
где:
с - скорость распространения электромагнитной волны в вакууме, c = 3∙108 мЧc-1;
τb- время восстановления антенного переключателя, tb = 0.2Чtu.
3.1.3. Разрешающая способность РЛС по дальности DRРазрешающая способность по дальности - минимальная дальность между двумя целями, имеющими угловые одинаковые координаты, при которой метки от них на экране индикатора видны раздельно.
Потенциальная разрешающая способность по дальности вычисляется по формуле:
![]()
 (3)
(3)
Для определения реальной разрешающей способности по дальности необходимо учесть параметры ЭЛТ индикатора:
![]() (4)
(4)
где:
dn - диаметр пятна, dn = 0.5мм = 5.0Ч10-4 м;
L - длина развертки.

![]() 0.15×м
0.15×м
где:
Dэ - диаметр ЭЛТ, Dэ = 0.25 м.
Но, т.к. мы имеем секторную развёртку с сектором обзора по азимуту Daобз = ±100°, смещаем центр экрана вниз, что увеличивает коэффициент использования экрана.
Реальная разрешающая способность по дальности будет иметь вид:
![]()
![]() 1.755×103 м
1.755×103 м
Разрешающая способность по азимуту определяется выражением:
![]() (5)
(5)
где:
q - ширина диаграммы направленности по половинной мощности в горизонтальной плоскости;
Dau – разрешающая способность по азимуту индикаторного устройства, зависящая от линейного размера азимутальной развертки и диаметра пятна ЭЛТ.
![]()
![]()
![]() 3.38×0
3.38×0
Периодом обзора РЛС Тобз называется интервал времени, необходимый для облучения всех точек зоны обзора станции, и определяется выражением:
![]() (6)
(6)
где:
Numin – минимальное число отраженных от цели импульсов, необходимых для обнаружения цели с заданной вероятностью;
Daобз – сектор обзора в горизонтальной плоскости, Daобз = 200°;
Fn – частота повторения зондирующих импульсов;
q - ширина диаграммы направленности антенны в горизонтальной плоскости.
Частота повторения зондирующих импульсов определяется по формуле:
 (7)
(7)
где:
Кз – коэффициент запаса, учитывающий влияние индикатора, Кз = 1,2.
![]() 277.778×Гц
277.778×Гц
![]()
![]() 5×c
5×c
3.1.6. Разрешающая способность по углу места.
Разрешающая способность по угловой координате (направлению) численно характеризуется минимальным углом (по азимуту или углу места) между направлениями на две равноудаленные относительно РЛС цели, при котором еще возможно их раздельное наблюдение.
В данном случае не имеет смысла говорить об разрешающей способности по углу места, т.к. мы проектируем обзорную РЛС, антенна которой имеет косекансную диаграмму направленности и не имеет разрешающую способность по углу места..
3.1.7. Секторы обзора по азимуту Daобз и по углу места Dbобз.Секторы обзора по азимуту и по углу места задаются в техническом задании. В данном случаи
сектор обзора по азимуту равен:……………………………………….Daобз = ±100°;
сектор обзора по углу места равен:……………………………….……Dbобз = 35°.
3.1.8. Точность определения координат по дальности Grn.Точность определения дальности зависит от точности измерения запаздывания отраженного сигнала, ошибок из-за неоптимальности обработки сигнала, от наличия неучтенных запаздываний сигнала в трактах передачи, приема и индикации, от случайных ошибок измерения дальности в индикаторных устройствах.
Ошибки в индикаторных устройствах обуславливаются нестабильностью масштабных меток и ошибками считывания.
Потенциальная точность измерения дальности РЛС вычисляется по формуле:
 (8)
(8)
где:
tu – длительность импульса;
 |
qmin – минимальное отношение сигнал-шум по напряжению, определяемое по характеристикам обнаружения (Рис.1) qmin=5.8
Из-за отсутствия внутриимпульсной модуляции Ксж=1.
![]() 24.805×м
24.805×м
Похожие работы



... коррелированной помехе ôr/ô2è1, Кп è, подавление помехи максимально. Рисунок 22. Структурная схема квадратурного компенсатора. Анализ эффективности применения комплекса помех и средств помехозащиты Следует, заметить, что никакое устройство для подавления помех не является универсальным. Каждое устройство защиты позволяет эффективно бороться только с каким-то одним ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
... техническому совершенству, боевым и эксплуатационным качествам не уступали лучшим зарубежным образцам, а нередко и превосходили их. Большинство из созданных в эти годы образцов в большей или меньшей степени представляли собой высокоточное оружие. В них использовались высокоточные инерциальные системы, системы коррекции и телеуправления движением на траектории и системы самонаведения на конечном ...
... (количество предъявляемых к госиспытаниям образцов, перечень техдокументации, предъявляемой по окончании работ, порядок испытания и приёмки образцов). Техническое предложение – совокупность конструкторских документов, содержащих техническое и технико-экономическое обоснование целесообразности разработки изделия на основании анализа технического задания заказчика и различных вариантов возможной ...
0 комментариев