Навигация
Радиолокационные системы и средства помехозащиты
36174
знака
1
таблица
13
изображений
Введение
Термин «радиолокация» составлен из двух слов: radiar — излучать и 1осиs — место. Отсюда «радиолокация» буквально означает определение места объекта посредством радиоизлучения. Более полное определение радиолокации обычно дается в следующем виде.
Радиолокацией называется область радиотехники, использующая явления отражения и излучения электромагнитных волн различными объектами для их обнаружения, определения местоположения и параметров движения в пространстве.
Процесс обнаружения объектов, определения их координат и параметров движения радиотехническими методами называется радиолокационным наблюдением. Специальные радиотехнические устройства, выполняющие эти задачи, называются радиолокационными станциями (РЛС) или радиолокаторами. Объекты радиолокационного наблюдения носят название радиолокационных целей. Такими целями могут быть, например, самолеты, ракеты и их боевые головки, искусственные спутники земли в полете, грозовые облака, корабли и другие надводные объекты, а также любые наземные объекты.
Основные узлы РЛС — передающее и приёмное устройства, расположенные в одном пункте (т. н. совмещенная РЛС); или в пунктах, удалённых друг от друга на некоторое (обычно значительное) расстояние (двух- и многопозиционные РЛС). В РЛС, применяемых для пассивной радиолокации, передатчик отсутствует. Антенна может быть общей для передатчика и приёмника (у совмещенной РЛС) или могут применяться раздельные антенны (у многопозиционных РЛС). Важная составная часть приёмного устройства РЛС (после собственно приёмника) — световой индикатор на электроннолучевой трубке (ЭЛТ). А в современных РЛС (середины 70-х гг.) наряду с индикатором — ЦВМ, автоматизирующая многие операции по обработке принятых сигналов.
Первые РЛС были станциями обнаружения самолётов. 5 стационарных импульсных РЛС было установлено на юго-западном побережье Великобритании в 1936 г. Они работали на сравнительно длинных (метровых) волнах, были весьма громоздки и не могли обнаруживать самолёты, летевшие на малой высоте.
В СССР первые опыты по радиообнаружению самолётов были проведены в 1934 г. Промышленный выпуск первых РЛС, принятых на вооружение, был начат в 1939. Эти станции (РУС-1) с непрерывным излучением, модулированным звуковой частотой, располагались цепочкой вдоль некоторой линии и позволяли обнаруживать самолёт, пересекающий эту линию. Они были применены на Карельском перешейке во время советско-финляндской войны 1939—40 гг. и на Кавказе во время Великой Отечественной войны 1941—45 гг.
Начиная с 60ых годов того столетия, получила развитие новая область науки — радиоастрономия и ее молодая отрасль — планетная радиолокация. В этой области РЛС используются для наблюдения за метеорами и планетами, изучения особенностей их движения, структуры поверхности, измерения точного расстояния до них и т п. Советские ученые в эту область науки вносили огромный вклад. Их научные работы постоянно опережали по времени и превышали по качеству аналогичные работы в США, Англии и других развитых странах. Достаточно отметить выдающиеся работы группы советских ученых под руководством академика В. А. Котельникова (А. Шаховская, О. Ржига, В. Дубровин), которая осуществила успешную, радиолокацию Венеры (1961 г.), Меркурия (1962 г.), Марса и Юпитера (1963 г.). При этом использовалась уникальная радиолокационная аппаратура, обеспечившая сверхмощное излучение и сверхчувствительный прием чрезвычайно слабых отраженных сигналов (например, во время локации Юпитера расстояние до него составляло 1 млрд. 200 млн. км). Проведенные научные эксперименты позволили уточнить основную астрономическую единицу — расстояние от земли до солнца (149 599 300 км), сделать выводы о скорости и направлении вращения планет и характере их поверхности, что имеет огромное значение для будущих космических полетов с посадкой на планеты. За выдающиеся работы группа В. А. Котельникова удостоена Ленинской премии в 1964 г. Радиолокационная техника непрерывно совершенствуется и находит все новые области применения.
Анализ задачи и её формализация
Предметом радиолокации как науки является разработка радиолокационных методов обнаружения целей, методов определения их координат, методов конструирования и эксплуатации радиолокационных устройств с учетом их тактического назначения и технических данных, а также изучение физических процессов, происходящих в этих устройствах.
РЛС дальнего обнаружения предназначена для обнаружения целей на возможно большем удалении. От этих РЛС не требуется высокой точности определения координат, но они должны обладать возможно большей дальностью обнаружения.
С появлением радиолокационных станций (РЛС) сначала в наземных системах ПВО, а впоследствии и на самолётах (бортовых РЛС-БРЛС) встала задача уменьшить возможность обнаружения самолета с помощью РЛС.
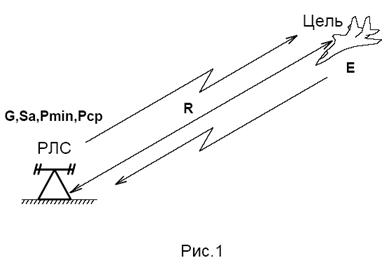
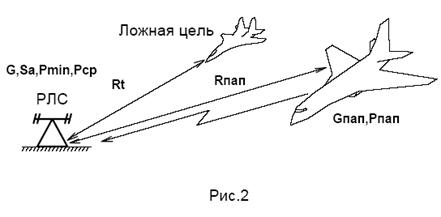
Самолет 2, летящий на большой высоте по траектории 3 к цели 8, будет обнаружен в точке 4 лучом 5 антенны РЛС 9 системы ПВО на достаточно большом удалении от объекта 8. Более раннему обнаружению самолета препятствуют неровности рельефа местности (возвышенности, горы) 10, которые луч РЛС не может обогнуть. Мощность (дальность) РЛС самолета 2 не позволяет ему в точке 4 обнаружить цель 8, однако бортовые системы самолета, зафиксировав его облучение РЛС системы ПВО, могут расчетными методами обнаружить положение РЛС системы ПВО.

Для нападения на объекты с сильной ПВО начали применять тактику уничтожения РЛС системы ПВО специальными ракетами, запуск которых с борта самолета 2 возможен в точке траектории 4, если достаточна дальность действия ракеты. Начали применять тактику полета самолета 14 к цели на малой высоте по траектории 12 по огибающей рельефа местности. В этом случае самолет 14 будет обнаружен в точке 11 траектории, т.е. на значительно меньшем удалении от цели, что резко повышает вероятность ее поражения.
Стремление обнаружить самолет противника на большом удалении от цели привело к созданию специальных самолетов дальнего радиолокационного обнаружения (ДРЛО).
Самолет дальнего радиолокационного обнаружения 7, патрулирующий на большой высоте в зоне охраняемого объекта, лучом 6 мощной бортовой РЛС может обнаружить самолет противника 2 в точке 1, а низколетящий самолет 14 – в точке 13 , что резко повышает вероятность поражения самолета.
В задачах ПВО после обнаружения и опознавания цели стоит задача об определении параметров цели. Существуют несколько принятых в радиолокации систем координат. В зависимости от выбора системы координат, будут ставиться задачи об определении тех или иных параметров цели. Например, в земной сферической системе координат параметрами движения являются азимут, угол места, и дальность цели. Здесь дальность цели – это расстояние от РЛС до самой цели.
Основными характеристиками РЛС являются:
- точность измерений,
- разрешающая способность,
- предельные значения ряда параметров (максимальная и минимальная дальность действия, сектор и время обзора и др.),
- помехоустойчивость.
К основным характеристикам относят также мобильность РЛС, её массу, габариты, мощность электропитания, срок службы, количество обслуживающего персонала и многие др. эксплуатационные параметры.
Задача выбора конкретных средств радиоэлектронного подавления (РЭП) может быть решена на основе имеющейся информации о тактико-технических характеристиках РЛС противоположной стороны. С другой стороны, при выборе характеристик систем помехозащиты необходимы некоторые априорные сведения о типах помех, которые вероятно будут применяться, и их энергетических параметрах. Таким образом, для проектирования систем, участвующих в радиоэлектронном конфликте, важно наличие достоверной информации о технических средствах противника.
По ТЗ определяем:
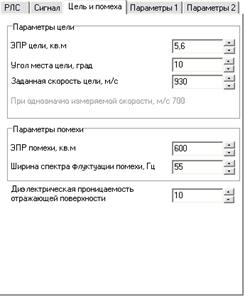
· Дальность обнаружения цели R=260 км;
· Максимальную скорость цели V=940м/с;
· ЭПР цели Е=6м2;
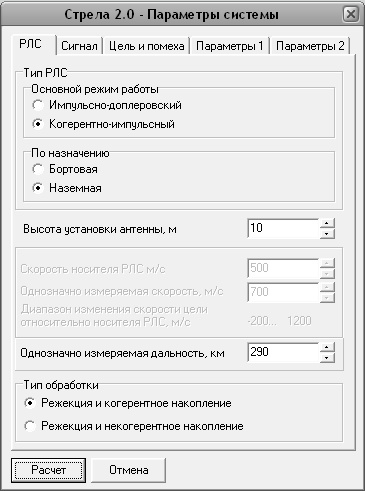
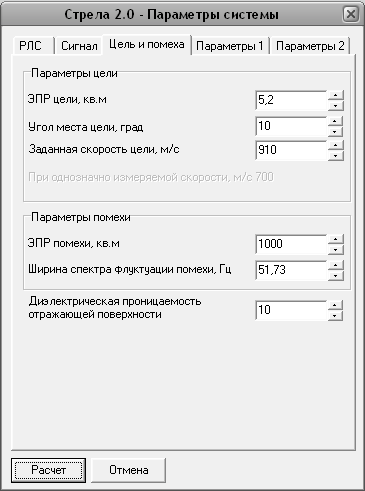
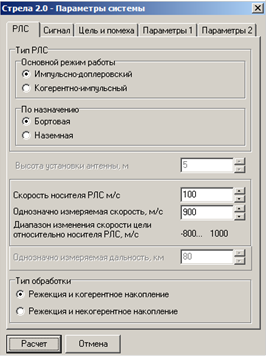
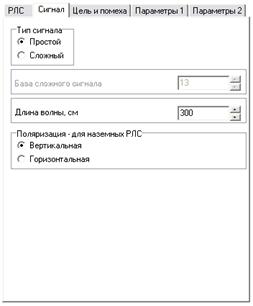
Расчёт параметров РЛС будем производить, используя программу «Стрела 2.0».
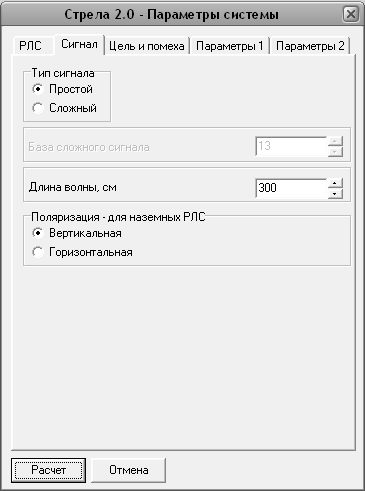
Для чего в диалоговых окнах зададим необходимые для расчета параметры. Так как РЛС дальнего обнаружения работает в метровом диапазоне волн, то задаем длину волны равной 1,8м. Однозначно измеряемая дальность – это наибольшее расстояние, при котором радиосигнал, излученный станцией, еще доходит до цели и после отражения от нее регистрируется приемником РЛС. Однозначно измеряемая дальность зависит от характера распространения радиоволн используемого диапазона, условий распространения, технических параметров станции и отражающих свойств цели. Однозначно измеряемая дальность зададим равной 260км.
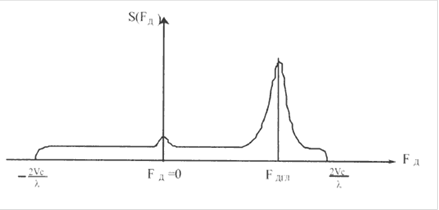
Ширину спектра флуктуации помехи находим исходя из условия, что ![]()
![]() è
è ![]() è
è ![]() Гц.
Гц.
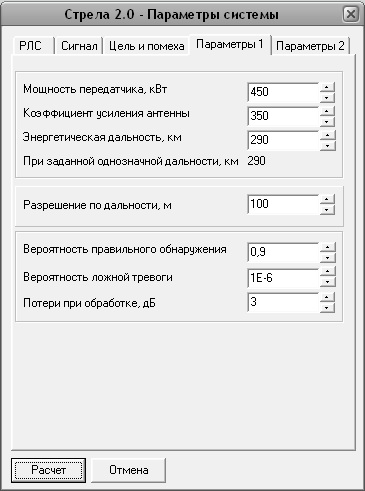
Разрешение по дальности – это то минимальное расстояние между двумя соседними объектами в пространстве, когда РЛС может различить эти два объекта отдельно. Зададим разрешение по дальности равным 160м.
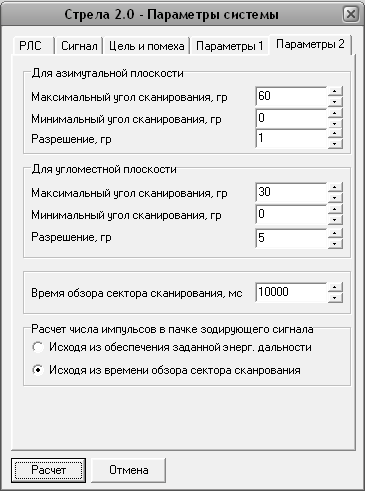
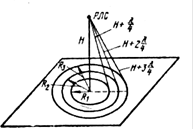
Пусть РЛС работает в режиме спирального обзора пространства (рис.ниже). Такой обзор получается путем вращения антенны с частотой ![]() вокруг горизонтальной оси и одновременно качанием по углу места в пределах сектора
вокруг горизонтальной оси и одновременно качанием по углу места в пределах сектора![]()
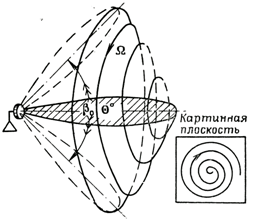
Спиральный обзор применяется для поиска и наблюдения целей в пределах некоторого телесного угла, ограниченного как по азимуту от 00 до 240, так и по углу места от 00 до 200.
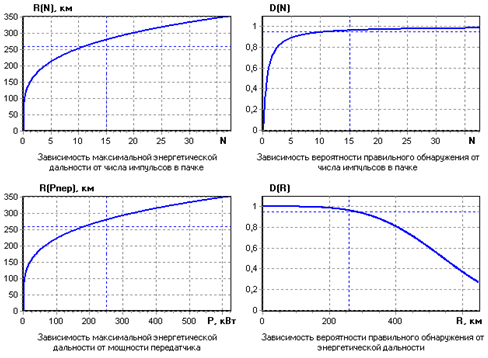
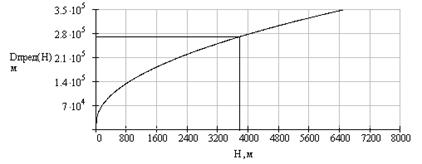
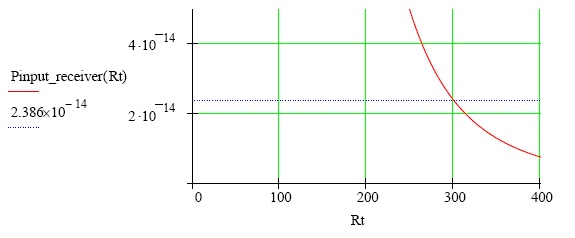
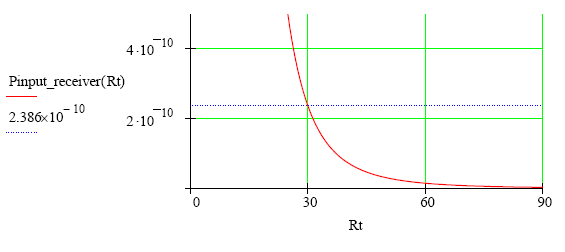
Результаты вычислений показывают, что при выбранных значения цель обнаруживается с запасом в 1,299дБ.
Зависимости характеристик обнаружения от параметров РЛС приведены на рис. 7.
Расчет параметров помехопостановщика
Похожие работы
... то Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно. Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и ...

... ) целей вплоть до их типа с ранжированием по степени важности (опасности); o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции; o точное определение расположения препятствий на пути следования вертолета. Расчет параметров РЛС радиоэлектронный защита помеха Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти ...


... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
0 комментариев