Навигация
НАХОЖДЕНИЕ КОНЕЧНЫХ ФОРМУЛ ДЛЯ КЭМС И КЭМСД
6776
знаков
3
таблицы
12
изображений
4. НАХОЖДЕНИЕ КОНЕЧНЫХ ФОРМУЛ ДЛЯ КЭМС И КЭМСД
И РАСЧЕТ ИХ ЗНАЧЕНИЙ
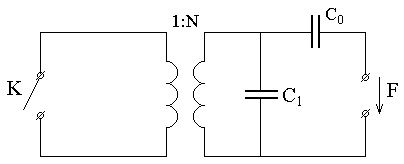 |
Представим эквивалентную схему емкостного ЭАП для низких частот: Рис. 4
статическая податливость ЭАП:
![]()
![]() C0=9,31×10-11 Ф
C0=9,31×10-11 Ф
электрическая емкость свободного преобразователя:
![]()

CT=4,635×10-9 Ф
![]()
![]()
![]()
![]()
КЭМС=0,089 ; КЭМСД=0,08
5. ОПРЕДЕЛЕНИЕ ЧАСТОТЫ РЕЗОНАНСА И АНТИРЕЗОНАНСА:
![]()
![]()
wр=1,265×107![]()
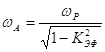
![]()
wА=1,318×107![]()
6. ВЫЧИСЛЕНИЕ ДОБРОТНОСТИ ЭЛЕКТРОАКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ В РЕЖИМЕ ИЗЛУЧЕНИЯ
![]()
![]()
Qm=65,201
эквивалентная масса: ![]()
![]()
MЭ=0,017 кг
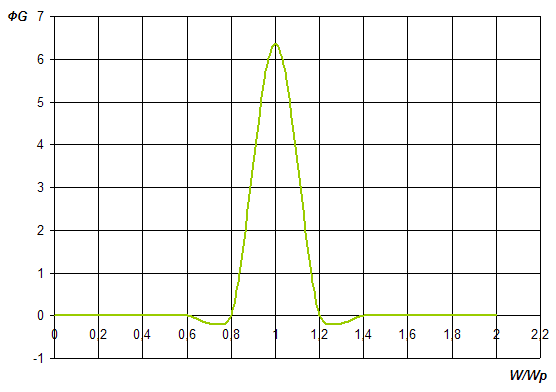
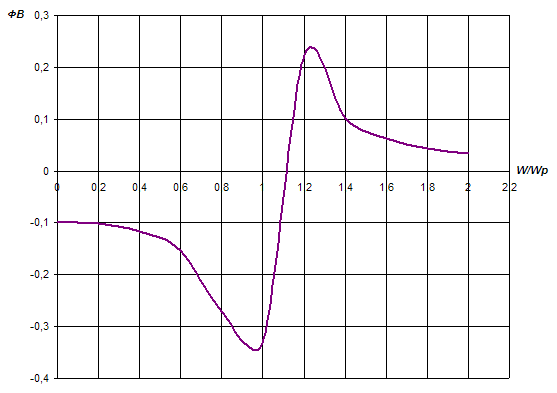
7. РАСЧЕТ И ПОСТРОЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ВХОДНОЙ ПРОВОДИМОСТИ И ВХОДНОГО СОПРОТИВЛЕНИЯ
активная проводимость:
![]()
реактивная проводимость:
![]()
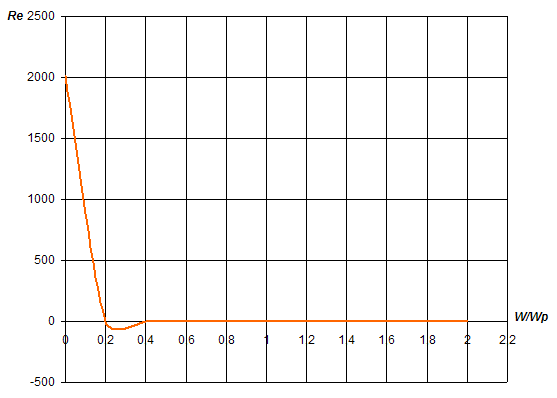
активное сопротивление:
![]()
реактивное сопротивление:
![]()
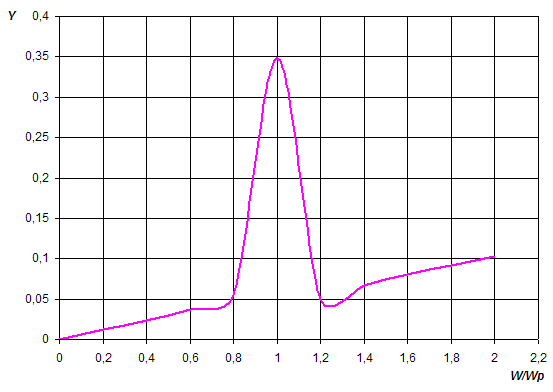
входная проводимость:
![]()
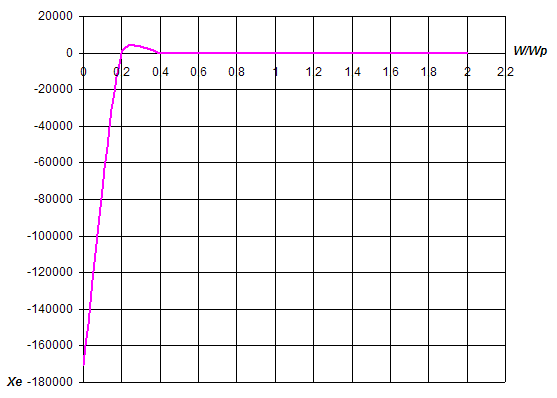
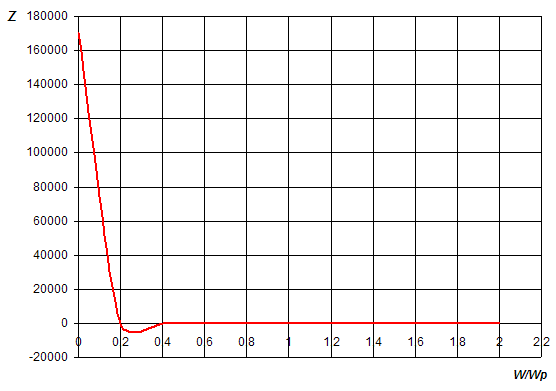
входное сопротивление:
![]()
|
ω/ωр |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
|
Ge |
6,941E-08 |
0,0001423 |
0,0002958 |
0,000487 |
0,00095 |
0,34 |
0,001432 |
0,001143 |
0,001195 |
0,001301 |
0,001423 |
|
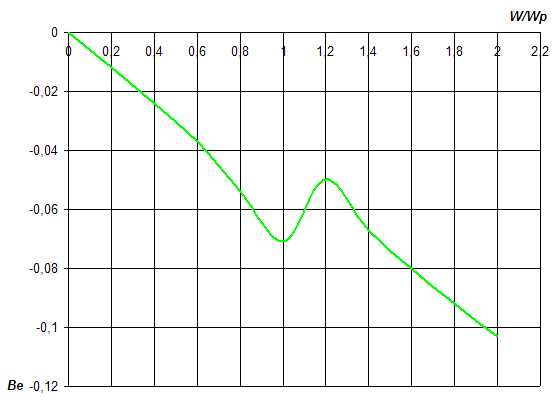
Be |
-0,000005861 |
-0,012 |
-0,024 |
-0,037 |
-0,054 |
-0,071 |
-0,05 |
-0,067 |
-0,08 |
-0,092 |
-0,103 |
|
Xe |
-170600 |
-84,979 |
-41,947 |
-27,086 |
-18,424 |
-0,588 |
-20,061 |
-14,898 |
-12,491 |
-10,883 |
-9,682 |
|
Re |
2020 |
1,028 |
0,521 |
0,357 |
0,323 |
2,814 |
0,577 |
0,254 |
0,186 |
0,154 |
0,133 |
|
Y |
0,000005862 |
0,012 |
0,024 |
0,037 |
0,054 |
0,348 |
0,05 |
0,067 |
0,08 |
0,092 |
0,103 |
|
Z |
170600 |
84,985 |
41,95 |
27,088 |
18,426 |
2,875 |
20,069 |
14,9 |
12,493 |
10,884 |
9,683 |
|
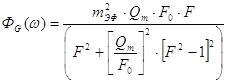
ФG |
1,505E-07 |
0,0003267 |
0,0008529 |
0,002202 |
0,009253 |
6,366 |
0,009361 |
0,002292 |
0,000992 |
0,000541 |
0,000335 |
|
ФB |
-0,098 |
-0,102 |
-0,116 |
-0,153 |
-0,271 |
-0,332 |
0,222 |
0,102 |
0,063 |
0,044 |
0,033 |

1. Пугачев С.И. Конспект лекций по технической гидроакустике.
2. Резниченко А.И. Подводные электроакустические преобразователи. Л.: ЛКИ, 1990.
3. Свердлин Г.М. Гидроакустические преобразователи и антенны. Л.: Судостроение, 1988.
Похожие работы
... 5.1 Назначение и логическая структура Данная программа реализована в интегрированной среде программирования Delphi и реализует модель системы идентификации плоской детали произвольной формы акустической локационной системой. Главная форма представляет собой окно, в котором отображается процесс идентификации детали, после чего программой определяется и выводится на экран количество отличий ...
... , элементы питания – 2400 мм2) высота пульта управления с учётом ширины корпуса будет равна 10 мм. 7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ 7.1 Характеристика проекта Проектируемая система представляет собой систему охранной сигнализации автомобилей. В разрабатываемой системе будут реализованы функции, как автономной охраны, так и централизованной. Так, например, она будет в режиме «Тревога» ...
0 комментариев