Навигация
2. Кинематика.
2.1. Системы отсчета и описание движения.
Механическое движение - процесс изменения положения тела или его частей по отношению к другим телам или друг другу.
Для описания механического движения необходимо указать тело, относительно которого рассматривается движение.
Произвольно выбранное неподвижное тело, по отношению к которому рассматривается движение данного тела, называется телом отсчета.
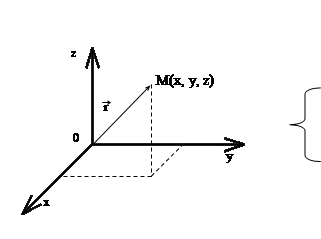 Связанная с этим телом произвольная система координат, называется системой отсчета. Чаще всего используют декартову прямоугольную систему.
Связанная с этим телом произвольная система координат, называется системой отсчета. Чаще всего используют декартову прямоугольную систему.
| |
Положение точки однозначно определяется 3-мя координатами М (х, у, z).
x = f1(t)
y = f2(t)
z = f3(t)
Эти уравнения являются уравнениями движения материальной точки. Совокупность последовательных положений точки М в процессе ее движения, называется траекторией движения точки.
Для определения уравнения траектории необходимо исключить из уравнения время.
С точки зрения кинематики никакого различия между разными системами отсчета нет, они все совершенно равноценны.
Лекция 2.
Величины, характеризующие движение.
Поступательное движение.
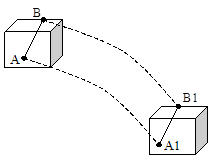
Простейшим видом механического движения абсолютно твердого тела является поступательное движение - такое движение, при котором тело перемещается параллельно самому себе. При этом все точки описывают конгруэнтные (одинаковые) траекторий, смещенные друг относительно друга.
|
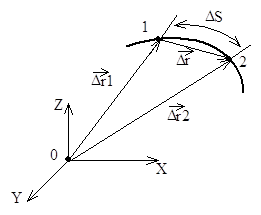
Для характеристики поступательного движения тела (материальной точка) вводится понятие перемещения.
Перемещением называется вектор, соединяющий начальное положение тела с его конечным положением.
Если положение точки в декартовой системе координат задано радиус-вектором, то перемещение можно определить как разность радиус векторов, характеризующих конечное (2) и начальное (1) положения точки, движущейся в течение промежутка времени Dt = t2 - t1 Dr = r2 - r1
|
Dzx = x2 – x1 = Dx
Dzy = y2 – y1 = Dy
Dzz = z2 – z1 = Dz
Dx, Dy, Dz – перемещение точки вдоль соответствующих осей.
![]()
![]()
|
Мгновенная линейная скорость - физическая величина» равная пределу, к которому стремится отношение элементарного перемещения DS за промежутку времени Dt в течение которого совершается это перемещение, при Dt 0.
![]()
![]() Мгновенная скорость - векторная величина, имеющая тоже направление, что и касательная к траектории, т.к. вектор мгновенной скорости v совпадает с вектором достаточно малого перемещения dS за достаточно малое время dt. Мгновенная скорость численно равна первой производной от перемещения по времени.
Мгновенная скорость - векторная величина, имеющая тоже направление, что и касательная к траектории, т.к. вектор мгновенной скорости v совпадает с вектором достаточно малого перемещения dS за достаточно малое время dt. Мгновенная скорость численно равна первой производной от перемещения по времени.
![]() Средняя скорость за промежуток времени Dt = t2 - t1 – это физическая величина, равная отношению вектора перемещения Dz к длительности промежутка времени Dt.
Средняя скорость за промежуток времени Dt = t2 - t1 – это физическая величина, равная отношению вектора перемещения Dz к длительности промежутка времени Dt.

Средняя скалярная (путевая) скорость - физическая величина, определяемая отношением пути S, пройденного точкой за промежуток времени Dt к длительности этого промежутка:

Т.к.
 , то
, то ![]() ,
,
 ,
, ![]() ,
, 
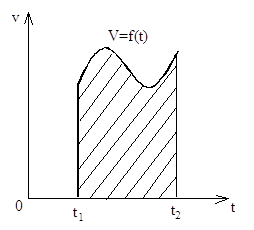
Величину пройденного точкой пути можно представить графически площадью фигуры ограниченной кривой v = f (t) прямыми t = t1 и t = t1 и осью времени на графике скорости.
При движении точки мгновенная скорость может меняться как по величине, так и по направлению. При этом вектор  стремится к некоторому пределу, называемому линейным ускорением:
стремится к некоторому пределу, называемому линейным ускорением:
|
Т.о., ускорение - векторная величина, характеризующая изменение скорости в единицу времени, численно равная первой производной от мгновенной
скорости по времени или второй производной от перемещения по времени.
![]()
![]()
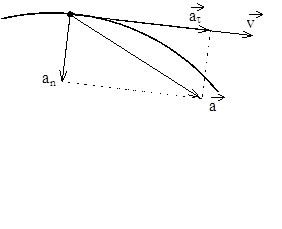
![]() В общем случае ускорение не совпадает по направлению с вектором скорости. Вектор ускорения а может быть представлен в виде 2-х взаимно перпендикулярных векторов: аn – нормального ускорения, а
В общем случае ускорение не совпадает по направлению с вектором скорости. Вектор ускорения а может быть представлен в виде 2-х взаимно перпендикулярных векторов: аn – нормального ускорения, а![]() – тангенциального ускорения. а
– тангенциального ускорения. а![]() направлена вдоль касательной к траектории движения.
направлена вдоль касательной к траектории движения.
|
![]()
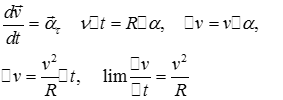
За малый промежуток времени dt тангенциальное ускорение изменяет скорость на величину ![]() .
.
![]() , следовательно, тангенциальное ускорение изменяет только величину скорости
, следовательно, тангенциальное ускорение изменяет только величину скорости
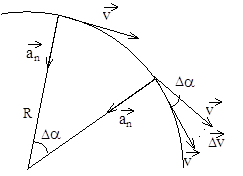
Нормальное ускорение аn изменяет только направление скорости, численное значение аn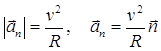 ,
,
где ![]() - единичный вектор нормали к траектории движения.
- единичный вектор нормали к траектории движения.
Полное ускорение точки численно можно определить так:
Отметим, что при поступательном движении твердого тела все его точки имеют одинаковые скорости и ускорения и описывают одинаковые траектории, смещенные относительно друг друга.
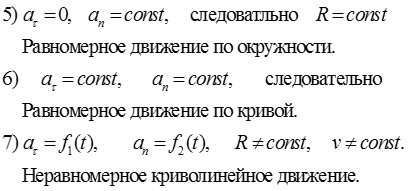
Классификация движений.
Для классификаций движений воспользуемся формулой для определения полного ускорения
Предположим, что
1)

Следовательно, ![]() Это случай равномерного прямолинейного движения.
Это случай равномерного прямолинейного движения.
Но ![]()
2)  Следовательно
Следовательно ![]()
Это случай равномерного движения. В этом случае

При v0 = 0 vt = at – скорость равноускоренного движения без начальной скорости.

4) 
Криволинейное движение с постоянной скоростью.
Лекция 3.
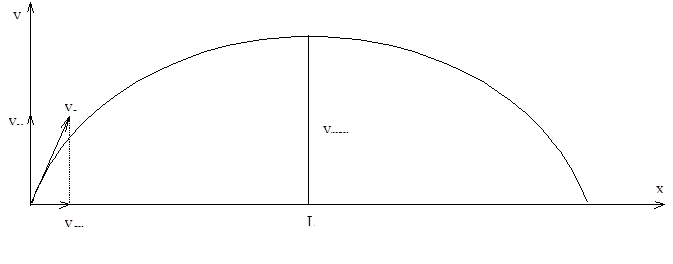
Движение тела, брошенного под углом к горизонту.
В качестве сложного движения рассмотрим движение точечной массы брошенной под углом a к горизонту со скоростью v0.
|
![]()
![]() В этом случае точка одновременно движется равномерно со скоростью vox вдоль оси Х и равнозамедленно с начальной скоростью vy
вдоль оси У. ( а = g )
В этом случае точка одновременно движется равномерно со скоростью vox вдоль оси Х и равнозамедленно с начальной скоростью vy
вдоль оси У. ( а = g )
Уравнение движения точки имеют вид:
![]() x = v0xt, где v0x = v0 cos α
x = v0xt, где v0x = v0 cos α
y = v0yt – gt2/2, где v0y = v0 sin α
Для нахождения уравнения траектории движения необходимо из системы уравнений исключить время:
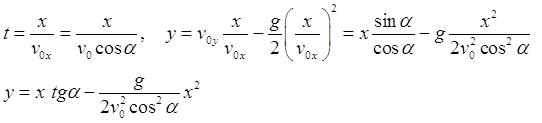
Полученное выражение представляет собой уравнение параболы:

Для нахождения ymax необходимо найти первую производную указанной функции по Х и приравнять ее к нулю, определить вторую производную и исследовать ее знак. Если вторая производная меньше 0, то функция действительно имеет максимум.

Следовательно, у = ymax при x=k/2b т.е.
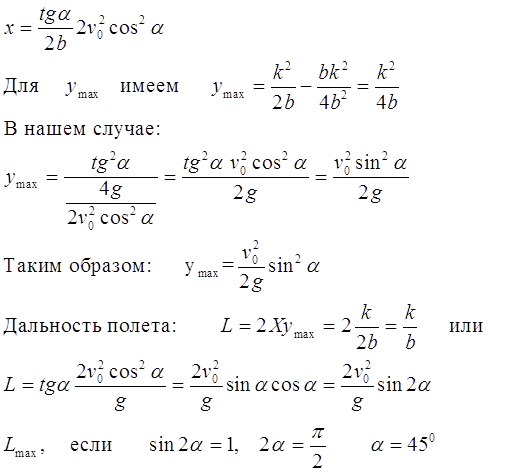
Все записанное справедливо, если отсутствует или достаточно мало сопротивление среды, в которой движется материальная точка. Таким образом, наибольшая дальность полета в отсутствии сил сопротивления наблюдается при движении тела под углом в 45° к горизонту.
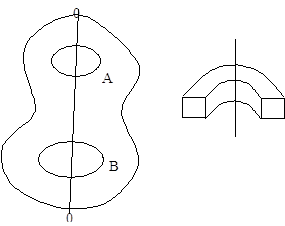
Вращательное движение.
Другим простейшим видом механического движения является вращательное движение абсолютно твердого тела. При таком движении его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат на одном прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения.
|
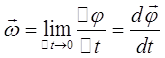
![]() Угловая скорость ω - векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени и численно равная первом производной от угла поворота по времени.
Угловая скорость ω - векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени и численно равная первом производной от угла поворота по времени.
![]()
![]()
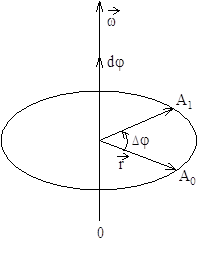
![]() Направление вектора ω совпадает с направлением аксиального вектора Δφ, т.е. такого, который имеет длину численно равную углу Δφ в определенном масштабе, а направление совпадающее с осью вращения и определяемое правилом правого винта.
Направление вектора ω совпадает с направлением аксиального вектора Δφ, т.е. такого, который имеет длину численно равную углу Δφ в определенном масштабе, а направление совпадающее с осью вращения и определяемое правилом правого винта.
![]()
![]()
![]()
|
Равномерное вращение характеризуется периодом вращения Т , т.е. временем, за которое тело делает один полный оборот, круговой частотой ω = 2π / Т, частотой γ = 1/Т
и числом оборотов в единицу времени n.
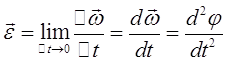
Угловая скорость может меняться как по величине, так и по направлению. Векторная величина, характеризующая изменение угловой скорости в единицу времени и численно равная второй производной от угла поворота по времени, называется угловым ускорением:
Если положение и радиус окружности, по которой происходит вращение не изменяется со временем, то έ совпадает по направлению с направлением ω в случае ускоренного вращательного движения и противоположна в случае замедленного вращения.
Связь между линейной и угловой скоростью и ускорением.
![]()
![]()
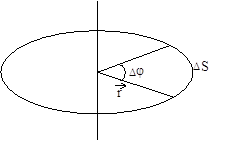
![]() Отдельные точки вращающегося тела имеют различные линейные скорости v , которые непрерывно изменяют свое направление и зависят от ω и расстояния r соответствующей точке до оси вращения.
Отдельные точки вращающегося тела имеют различные линейные скорости v , которые непрерывно изменяют свое направление и зависят от ω и расстояния r соответствующей точке до оси вращения.
Точка, находящаяся на расстоянии r от оси вращения проходит путь ΔS = rΔφ.
|
![]()
 , при Δt 0 получим пределы от левой и правой частей равенства:
, при Δt 0 получим пределы от левой и правой частей равенства:

Но ![]()
Таким образом, чем дальше отстоит точка от оси вращения, тем больше ее линейная скорость. Известно, что ![]()

Откуда
![]()
![]()
![]()
![]() Из написанных формул видно, что aτ, an и a растут с увеличением расстояния точек до оси вращения. Формула v = ωr устанавливает связь между модулями векторов v, r, и ω, которые перпендикулярны друг к другу.
Из написанных формул видно, что aτ, an и a растут с увеличением расстояния точек до оси вращения. Формула v = ωr устанавливает связь между модулями векторов v, r, и ω, которые перпендикулярны друг к другу.
|
![]()
![]()
![]()
![]()
![]()
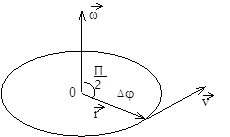
![]() Т.к. ω | r ,то можно написать v = ω∙r∙sina это ничто иное как модуль векторного произведения. Таким образом
Т.к. ω | r ,то можно написать v = ω∙r∙sina это ничто иное как модуль векторного произведения. Таким образом
v = [ ω r ]
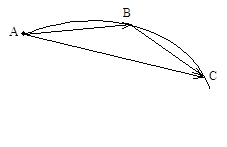
Рассмотренные простейшие виды движения твердого тела важны потому,
что любое движение твердого тела сводится к ним.
|
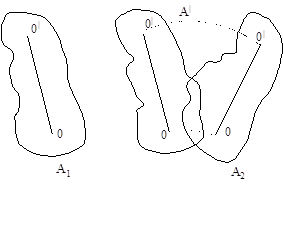
Рассмотрим два последовательных положения тела А1 и А2. Из положения А1 в положение А2 тело можно перевести следующим образом: вначале А1 в А1 поступательно. Затем из положения А1 в положение А2 путем поворота на угол φ вокруг произвольной точки 0.
Следует отметить, что в вращательному движению применимы все формулы кинематики материальной точки с заменой в них линейных величин на соответствующие угловые.
Например: 
Колебательное движение.
Колебаниями или колебательными движениями являются движения или изменения состояния, обладающие той или иной степенью повторяемости во времени. Колебания весьма разнообразны по своей природе: колебания пружинного маятника, качания маятников, колебания струн, вибрации фундаментов, качка корабля, колебания ветвей деревьев и т.д.
Колебания называются периодическими, если значения физических величин, изменяющихся в процессе колебаний, повторяются через равные промежутки времени: положение маятника в часах, Т – период, v = 1/T.
При изучении кинематики колебательных движений нас интересуют:
- закон, по которое повторяется движение;
- время, через которое тело (система) снова приходит к тому же самому состоянию;
- наибольшие отклонения, которых достигает движущееся тело и т.д.
Изучив эти характеристика колебательного движения, мы можем определить состояние тела (системы) в любой момент времени.
Все сложные виды колебательных движений можно свести к простейшим гармоническим колебаниям. Гармоническими колебаниями физической величины a называется процесс изменения ее во времени по закону sin или cos.
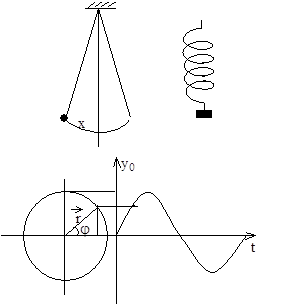
Например: колебания математического маятника, x = x0cosωt колебания пружинного маятника.
|
![]()
![]() Если радиус окружности r, угловая скорость вращения ω , то проекция
Если радиус окружности r, угловая скорость вращения ω , то проекция
y = r sinφ = r sinωt
если было начальное смещение на φ0,
y = r sin ( ωt + φ0 )
Аргумент синуса (или cos) наз. фазой. Фаза определяет положение колеблющейся величины в данный момент времени. φ0 – начальная фаза, которая определяет положение точки в начальный момент времени t = 0
y = y0 sinφ0
ω - круговая или циклическая частота, т.е. число полных колебаний, которые совершаются за 2π единиц времени:
ω = 2πv = 2π/Т
где v - частота колебаний, т.е. число полных колебаний за единицу времени;
Т - период колебания - наименьший промежуток времени, по истечении которого повторяются значения всех величин, характеризующих колебательное движение, т.е. время, за которое совершается полное колебание; у – смещение точки - удаление от положения равновесия в данный момент времени; у0 - амплитуда колебания - (наибольшее значение колеблющейся функции).
Вычислим скорость и ускорение точки, совершающей гармоническое колебание:
Знак " – " означает, что ускорение направлено в сторону, противоположную смещению. Изменение y, v, a с течением времени можно представить так:
| t | y | v | a |
| 0 | 0 | ωy0 | 0 |
| T/4 | y0 | 0 | – ω2 y0 |
| T/2 | 0 | – ωy0 | 0 |
| 3T/4 | – y0 | 0 | ω2 y0 |
| T | 0 | ωy0 | 0 |
|
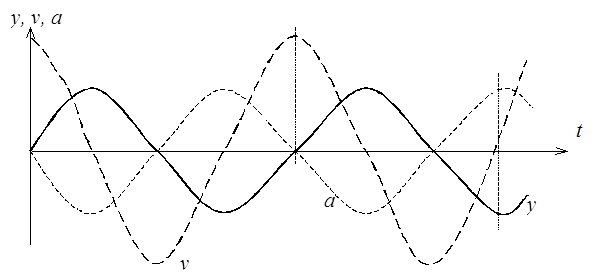
Из таблицы и графика следует, что скорость имеет максимальные значения, когда точка проходит положения равновесия, а ускорение максимально в крайних положениях.
Сложение колебаний Из теорий гармонического анализа известно, что любую периодическую функцию f(x), имеющую период 2π, можно представить в виде тригонометрического ряда: 
где a0, an, bn - коэффициенты этого ряда, определяемые по формулам:

Следовательно, любое сложное колебание можно представить как сумму нескольких простых. Чтобы знать, как зависят параметры сложного колебания от соотношения частот, амплитуд, фаз и направлений слагаемых колебаний, рассмотрим наиболее простые случаи сложения гармонических колебаний.
Похожие работы

... себе электрон в виде “вращающегося маленького шарика”! Я просто хочу обратить внимание на неправомочность утверждения “оказалось несостоятельным”. Лекция 21 19.2. Как нам это понимать Итак, было сказано предельно ясно: трудности понимания квантовой физики возникают потому, что мы пытаемся применить старые представления к новым явлениям. Понять квантовые явления, разумеется ...
... фара́да). 1 фарад равен электрической ёмкости конденсатора, при которой заряд 1 кулон создаёт между обкладками конденсатора напряжение 1 вольт. Ф = Кл/В = A·c/B Единица названа в честь английского физика Майкла Фарадея Фарад — очень большая ёмкость. Емкостью 1Ф обладал бы уединенный шар, радиус которого был бы равен 13 радиусам Солнца. Для сравнения, ёмкость Земли (шара размером с ...
... гальванометра отклонялась (то же происходило и при поднятии электромагнита из катушки). Эта схема напоминает рисунок из лабораторного журнала Фарадея. Удивительно, как схожи оказались эксперименты двух великих физиков, работавших независимо друг от друга на разных континентах! В своей статье, написанной уже после знакомства с опытом Фарадея, Генри, отдавая должное английскому физику, подчеркнул, ...
... платы. 4.Расширение общественных фондов потребления снижало заинтересованность личности в результатах своего труда. 1 В Полном собрании сочинений В.И.Ленина нет никаких высказываний, о которых говорит И.В.Сталин. В.Н. Гузаров и Н.И. Гузарова Курс лекций «История России: 1861-1995 гг. Томск - 1999Глава 1. Введение к курсу «Истории России» Территория современной России, огромной страны, ...
0 комментариев