Методами теории оптимального управления синтезирована система стабилизации мощности резания, проведено исследование синтезированной системы на математической аналоговой модели.
В результате исследования разработана система стабилизации мощности резания, обеспечивающая низкую чувствительность к параметрическим возмущениям.
Основные конструктивные и технико-эксплуатационные показатели разработанной системы:
высокая точность стабилизации мощности резания на заданном уровне;
достаточно большое быстродействие системы;
малая чувствительность к изменению параметров объекта управления.
Настоящая система управления может быть использована не только в данном вальцетокарном станке, но и в тяжелых токарных и токарно-винторезных станках, где есть необходимость ограничить мощность, выделяемую с главного привода станка или мощность резания на практически любом заданном уровне.
Эффективность разработанной системы управления определяется применением оптимальных регуляторов, а также использованием современной элементной базы.
ВВЕДЕНИЕ
В связи с выходом отечественных производителей металлопродукции на внешний рынок и производством проката по стандартам ASTM, DIN и другим, к его качеству и геометрическим размерам предъявляются повышенные требования, зачастую превышающие требования существующих ГОСТов и технических условий.
Качество металлопроката и геометрические размеры профилей, в том числе и производимых станом 600 Алчевского металлургического комбината, зависят от многих факторов, одним из которых является качество изготовления и точность обработки поверхности валков черновых и чистовых клетей прокатных станов.
В соответствии с рабочими калибровками и монтажами валков в вальцетокарной мастерской сортопрокатного цеха производится обработка и расточка валков черновых и чистовых клетей. Для этих целей применяется станок типа IK 825 Ф2, который предназначен для обработки валков как сортовых, так и листовых прокатных станов.
При обработке валков, имеющих неоднородную структуру и различные физико-механические свойства, возникают броски мощности резания, которые отрицательно влияют на качество поверхности валков и точность геометрических размеров готового проката.
В связи с этим в данном проекте была предложена система стабилизации мощности резания на заданном уровне, что оказывает положительное влияние на качество поверхности обрабатываемых валков.
1. ОБЩИЕ СВЕДЕНИЯ О МЕХАНИЗМЕ И ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ
Станок вальцетокарный калибровочный специальный модели IК 825 Ф2 с цифровой индикацией и управлением (УЦИ) предназначен, согласно [15] для обработки и калибровки наружных поверхностей прокатных валков в специальных калибровочных люнетах. На станке не предусматривается обработка деталей со смещенным центром тяжести относительно оси вращения типа эксцентриковых и коленчатых валов, конусных деталей с неуравновешенными массами.
Управление основными движениями станка (перемещение суппортов по осям X и Z) осуществляется от УЦИ. Операции, связанные с переключением ступеней главного привода, регулированием скорости вращения шпинделя и подач суппорта, перемещение и фиксация задней бабки, перемещение пиноли, установка и зажим изделия, установка люнеты, установка и зажим режущего инструмента на суппорте выполняются от органов управления, расположенных на этих сборочных единицах без учета УЦИ, то есть эти операции не программируются.
Обработка деталей может быть произведена в "ручном" режиме (УЦИ выполняет роль индикации) и "программном" (автоматическом) режиме по программе, заданной ручным вводом задания на пульт ввода УЦИ с управлением главным приводом и суппортами с помощью органов управления, расположенных на пульте суппортов.
Применение УЦИ К 525 повышает производительность труда в режиме индикации и преднабора, а в автоматическом режиме обработки по программе освобождает оператора от пользования универсальным мерительным инструментом, повышает точность работы и обработки деталей, а также снижает утомляемость рабочего-оператора, позволяет организовать бригадное и многостаночное обслуживание станка.
Требования к электроприводу главного движения
Требования к электроприводам и системам управления станками определяются технологией обработки, конструктивными возможностями станка и режущего инструмента.
Основными технологическими требованиями согласно [3, 4, 7] являются обеспечение:
самого широкого круга технологических режимов обработки с использованием современного режущего инструмента;
максимальной производительности;
наибольшей точности обработки;
высокой чистоты обрабатываемой поверхности.
Удовлетворение всем этим и другим требованиям зависит от характеристик станка и режущего инструмента, мощности главного привода, и электромеханических свойств приводов подач и системы управления.
В современных станках с числовым программным управлением (ЧПУ) функции, выполняемые электроприводом главного движения, значительно усложнены. Помимо стабилизации частоты вращения, при силовых режимах резания требуются обеспечение режимов позиционирования шпинделя при автоматической смене инструмента, что неизбежно ведет к увеличению требуемого диапазона регулирования частоты вращения.
Требуемый технологический диапазон регулирования скорости шпинделя с постоянной мощностью по [8, 9], равный 20 — 50 при двухступенчатой коробке скоростей, можно вполне обеспечить при электрическом регулировании скорости двигателя с постоянной мощностью в диапазоне 5:1 — 10:1, что вполне осуществимо при современных двигателях постоянного тока.
Стабильность работы привода характеризуется перепадом частоты вращения при изменении нагрузки, напряжении питающей сети, температуры окружающего воздуха и тому подобных.
Погрешность частоты вращения для главного привода вальцетокарного станка модели IК 825 Ф2 должна, согласно [10], составлять не более:
суммарная погрешность — 5%;
погрешность при изменении нагрузки — 2%;
погрешность при изменении направления вращения — 2%.
Коэффициент неравномерности, рассчитываемый как отношение разности максимальной и минимальной мгновенных частот к средней частоте вращения при холостом ходе привода, должен быть не более 0,1.
В современных станках динамические характеристики приводов главного движения по управлению прямым образом определяют производительность. При этом время пуска и торможения по [11] не должно превышать 2,0 —4,0 с. При наличии зазоров в кинематической цепи главного привода перерегулирование приводит к дополнительным затратам времени на позиционирование, поэтому появляется необходимость обеспечения монотонного апериодического характера изменения скорости.
Динамические характеристики электропривода по нагрузке практически определяют точность и чистоту обработки изделия, а также стойкость инструмента. Устойчивый процесс резания при необходимой точности и чистоте поверхности возможен, если параметры настройки привода обеспечивают при набросе номинального момента нагрузки максимальный провал скорости не более 40% при времени восстановления, не превышающем 0,25с.
Отличительной особенностью главного привода станков с ЧПУ является необходимость применения реверсивного провода даже в тех случаях, когда по технологии обработки не требуется реверс. Требование обеспечения эффективного торможения и подтормаживания при снижении частоты вращения и режимов поддержания постоянной скорости резания приводит к необходимости применения реверсивного привода с целью получения нужного качества переходных процессов.
ВЫБОР И ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ
В электроприводах главного движения токарных станков согласно [11] мощность электродвигателя определяется требуемой мощностью резания. Для определения мощности резания согласно с [1] определим скорость резания V и тангенциальную составляющую силы резания Fz для самого тяжелого варианта работы — для наружной черновой обработке валка диаметром 1000 мм, изготовленного из конструкционной стали марки 60ХН резцами из быстрорежущей стали марки Т14К8:
 , (2.1)
, (2.1)
где Сv = 340 — эмпирический коэффициент;
Т = 60 мин — стойкость резца;
t = 12 мм — глубина резания;
S = 34 мм/об — продольная подача;
m = 0.2; x = 0.15; y = 0.45 — эмпирические коэффициенты;
Kv — поправочный коэффициент, учитывающий фактические условия резания.
Kv = Kmv* Kпv* Kиv ,(2.2)
где:Kпv = 1 — коэффициент, отражающий состояние поверхности заготовки — без корки;
Kиv = 0.8 — коэффициент, учитывающий качество материала инструмента, используется резец марки Т14К8;
Kmv — коэффициент, учитывающий качество обрабатываемого материала (физико-механические свойства).
 , (2.3)
, (2.3)
где Кг = 1 — коэффициент, зависящий от обрабатываемого материала и материала инструмента;
?В = 1100 МПа — предел прочности обрабатываемого материала;
nВ = 1.78 — показатель степени, зависящий от обрабатываемого материала и материала инструмента.
Тогда, подставив (2.3) в (2.2), получим:
Kv = 0.52* 1* 0.8 = 0.41,(2.4)
Тогда, с учетом (2.1)—(2.4), получим:
 м/мин, (2.5)
м/мин, (2.5)
Тогда, зная скорость резания V, определим тангенциальную составляющую силы резания Fz:
Fz = 10 * Cp * tx * Sy * Vn * Kp, (2.6)
гдеCp = 200 — эмпирический коэффициент;
x = 1; y = 0.75; n = 0 — эмпирические коэффициенты.
Кp — поправочный коэффициент, учитывающий фактические условия резания.
Kp = Kmp * K?p * K?p * Krp * K?p;(2.7)
где K?p, K?p, Krp, K?p — поправочные коэффициенты, учитывающие влияние геометрических параметров режущей части инструмента на составляющие силы резания (резец из быстрорежущей стали марки Т14К8);
K?p = 1.15 — передний угол в плане ? = 12-15?;
K?p = 1 — угол наклона главного лезвия ? = 15?;
Krp = 0.93 — радиус при вершине r = 1 мм;
K?p = 1 — главный угол в плане ? = 45?;
Kmp — поправочный коэффициент, учитывающий влияние качества обрабатываемого материала на силовые зависимости.
 , (2.8)
, (2.8)
где ?В = 1100 МПа — предел прочности обрабатываемого материала;
n = 0.75 — показатель степени, учитывающий влияние качества обрабатываемого материала на силовые зависимости.
Тогда, подставив (2.8) в (2.7), получим:
Kp = 1.33 * 1.15 * 1 * 0.93 * 1 = 1.425.(2.9)
Подставив (2.1) — (2.5), (2.7) — (2.9) в (2.6), получим:
Fz = 10 * 200 * 121 * 340.75 * 8.660 * 1.425 = 481670 кН.(2.10)
Тогда, зная скорость резания V и тангенциальную составляющую силы резания Fz, определим требуемую мощность резания (с учетом коэффициента полезного действия системы равного 0.9):
 кВт.(2.11)
кВт.(2.11)
Поскольку расчет велся для самого тяжелого варианта, то можно выбирать двигатель, который проходит по мощности для этого варианта.
Выбираем двигатель [6] серии 4ПН 400 - 22 МУ3 со следующими параметрами:
номинальная мощность двигателя Рн = 70 кВт;
номинальный ток двигателя Iн = 350 А;
номинальное напряжение питания Uн = 220 В;
момент инерции двигателя Jдв = 8.25 кг*м2;
минимальная скорость вращения nmin = 250 об/мин;
номинальная скорость вращения nн = 750 об/мин;
максимальная скорость вращения nmax = 1500 об/мин;
пусковая перегрузочная способность ?п = 2;
номинальный коэффициент полезного действия ?н = 93%.
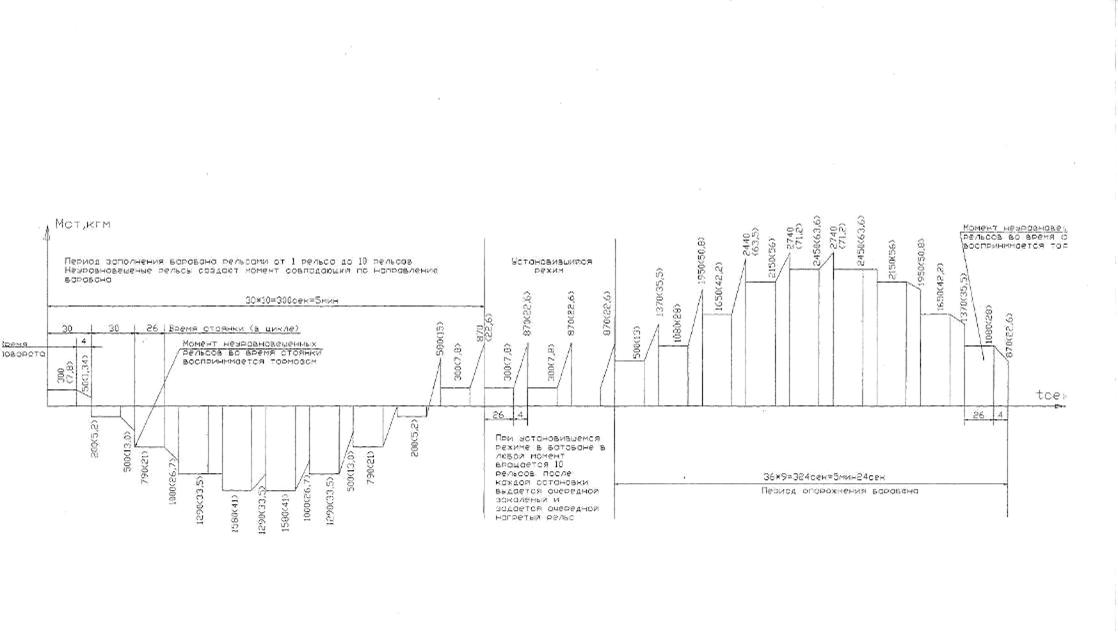
Произведем проверку выбранного двигателя по нагреву согласно тахограммы и нагрузочной диаграммы, приведенных на Рис. 2.1, где:
t1 = 1 с — время разгона электродвигателя;
t2 = t4 = 2 с — время работы электродвигателя на холостом ходу;
t3 = 3000 с — время работы электродвигателя с номинальной нагрузкой;
t5 = 1 с — время торможения электродвигателя;
I1 = 2Iн = 700 А — пусковой ток двигателя
I2 = 0.1Iн = 35 А — ток холостого хода электродвигателя;
I3 = 0.95Iн = 332 А — номинальный рабочий ток двигателя;
I4 = 0.1Iн = 35 А — ток холостого хода электродвигателя;
I5 = 1.9Iн = 665 А — тормозной ток электродвигателя.
Тогда:
 (2.12)
(2.12)
Поскольку полученный эквивалентный ток меньше номинального тока двигателя, следовательно по нагреву данный двигатель подходит и выбран верно.
Для питания двигателя выбираем комплектный тиристорный преобразователь [2] серии ЭПУ1-2-4347 DУХЛ4 со следующими параметрами:
Рн = 92 кВт — номинальная мощность преобразователя;
Uн = 230 В — номинальное выходное напряжение ТП;
Iн = 400 А — номинальный выходной ток преобразователя.
Для питания тиристорного преобразователя выбираем вводной трансформатор [2] ТСЗП - 160 / 0.743 со следующими параметрами:
Рн = 143 кВА — номинальная потребляемая мощность трансформатора;
U1 = 380 В — напряжение первичной обмотки трансформатора;
U2ф = 230 В — напряжение вторичной обмотки трансформатора;
I2ф = 500 А — ток вторичной обмотки трансформатора;
?Рхх = 795 Вт — потери холостого хода в трансформаторе;
?Ркз = 2400 Вт — потери при коротком замыкании в трансформаторе;
Uкз = 4.5% — напряжение короткого замыкания трансформатора;
Iхх = 5.2% — ток холостого хода трансформатора.
Для сглаживания пульсаций выпрямленного напряжения выбираем сглаживающий реактор [5] ФРОС - 125 / 0.5 У3 со следующими параметрами:
Iн = 500 — номинальный ток сглаживающего реактора;
Lн = 0.75 мГн — номинальная индуктивность сглаживающего реактора;
Rн = 3 мОм — номинальное сопротивление реактора.
АНАЛИЗ РАБОТЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПАКЕТА МАСС
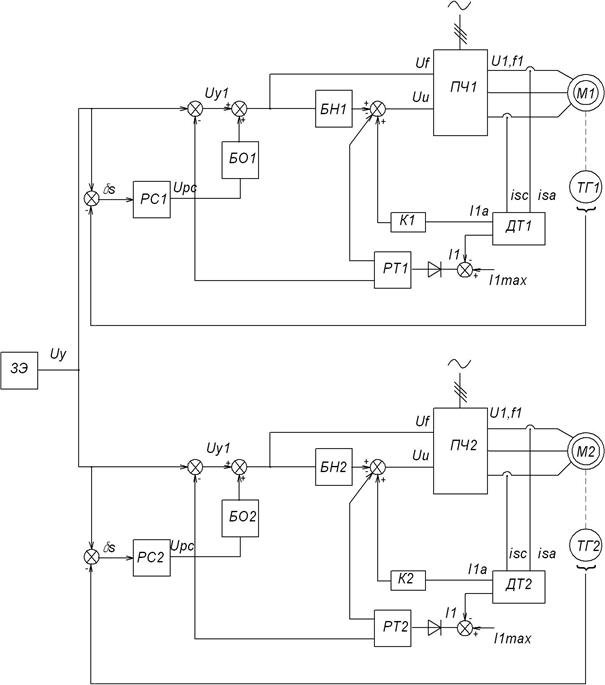
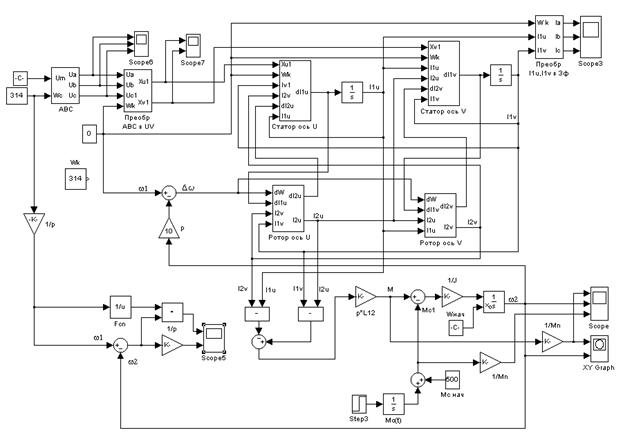
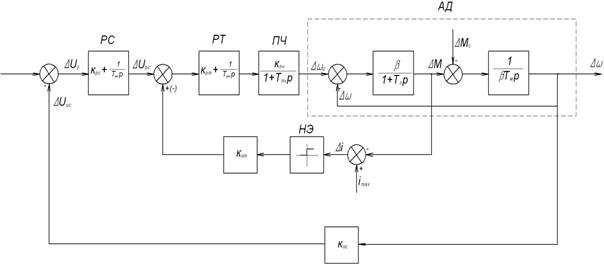
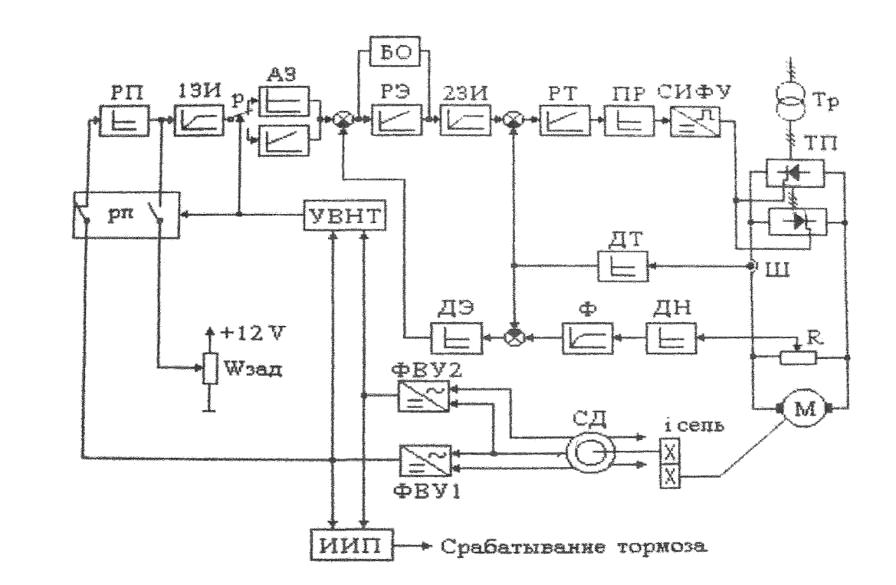
По структурной схеме системы, приведенной на Рис. 6.1., составим математическую модель проектируемой системы для дальнейшего моделирования, которая приведена на Рис. 6.2
В результате моделирования были получены результаты, приведенные на Рис.6.3. — Рис. 6.9., которые приведены ниже.
На рисунках приведено:
Рис. 6.3. — пуск двигателя;
Рис. 6.4. — стабилизация расчетного варианта мощности;
Рис. 6.5. — работа системы при увеличении коэффициента
резания на 50%;
Рис. 6.6. — работа системы при уменьшении коэффициента
резания на 50%;
Рис. 6.7. — работа системы при уменьшении механической постоянной времени на 10%;
Рис. 6.8. — работа системы при уменьшении механической постоянной времени на 20%;
Рис. 6.9. — работа системы при уменьшении механической постоянной времени на 30%.
Таким образом, из приведенных графиков переходных процессов можно сделать вывод, что изменение механической постоянной времени, что может случиться в результате уменьшения массы обрабатываемой детали и ее геометрических размеров, не оказывает существенного влияния на стабилизацию мощности, в то время, как изменение механических свойств обрабатываемой детали или режущего инструмента, изменение чистоты поверхности детали и так далее существенно влияют на мощность резания. При этом изменяется характер переходного процесса нарастания мощности резания. Из апериодического (рис.6.4) он превращается в колебательный (рис. 6.5)
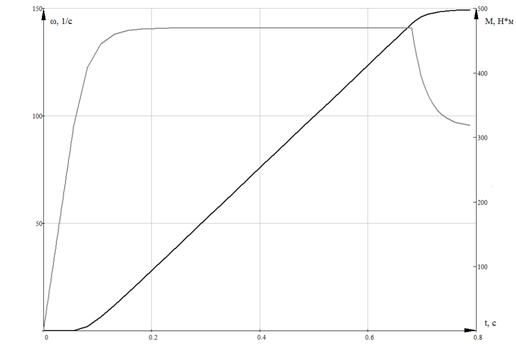
Рисунок 6.3 — Переходный процесс пуска двигателя
Рисунок 6.4 — Переходный процесс стабилизации мощности.
Рисунок 6.5 — Переходный процесс стабилизации мощности при увеличении Кр на 50%.
Рисунок 6.6 — Переходный процесс стабилизации мощности при уменьшении Кр на 50%.
Рисунок 6.7 — Переходный процесс стабилизации мощности при уменьшении Тм на 10%.
Рисунок 6.8 — Переходный процесс стабилизации мощности при уменьшении Тм на 20%.
Рисунок 6.9 — Переходный процесс стабилизации мощности при уменьшении Тм на 30%.
Похожие работы
... 284 Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом. 1.1. Общие требования к аппаратуре ...
... 11. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ Принципиальная электрическая схема электропривода приведена в графической части Описание схемы Схема представляет собой систему управления привода по схеме «Тиристорный преобразователь частоты – Асинхронный двигатель с короткозамкнутым ротором». Преобразователь частоты питается от сети напряжением 380 В. ...
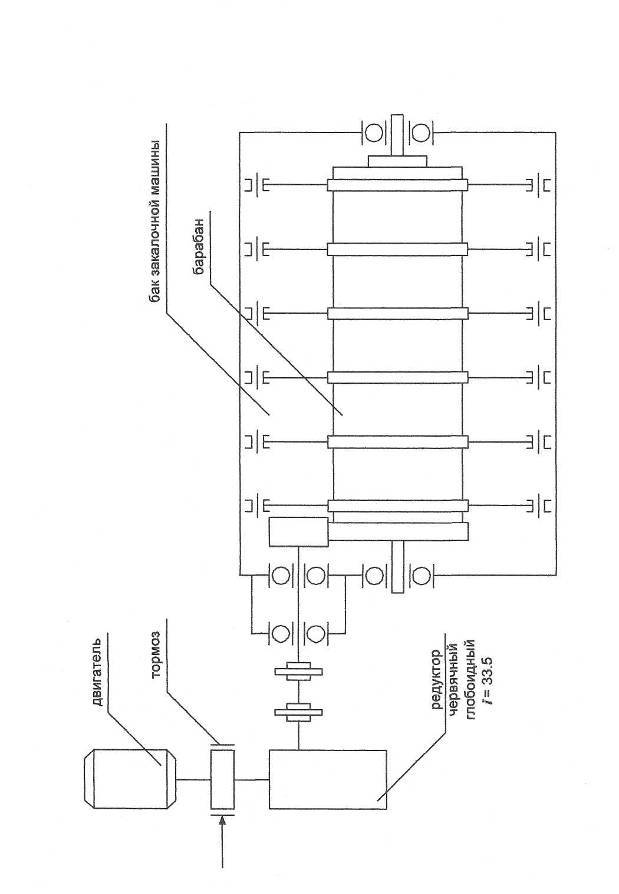
... К1 (ЗП). Роле К1 срабатывает и своими н.з. контактами размыкает цепь питания реле КТ4. После этого накладывается механический тормоз. 3.3 Разработка технологических и защитных блокировок Разрешается работа привода поворота барабана закалочной машины только в том случае, если: 1. Выталкиватель находится в исходном положении (включено реле 25РВИ); 2. Доталкивателъ находится в исходном ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...
0 комментариев