ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ ЗНАЧЕНИЙ СТАТИЧЕСКИХ МОМЕНТОВ И МОМЕНТА ИНЕРЦИИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
РАСЧЁТ И ВЫБОР ЭЛЕМЕНТОВ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОПРИВОДА
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ
Навигация
Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
34060
знаков
10
таблиц
9
изображений
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМ. Р.Е. АЛЕКСЕЕВА
Кафедра Электропривод и автоматизация промышленных установок
Курсовой проект
Электропривод литейного крана по схеме «Преобразователь частоты – Асинхронный короткозамкнутый двигатель»
РУКОВОДИТЕЛЬ
Филатов И.Н.
СТУДЕНТ
Марфин В.В.
Нижний Новгород 2010
Задание № 13
ЭЛЕКТРОПРИВОД ЛИТЕЙНОГО КРАНА ПО СХЕМЕ “ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ КОРОТКОЗАМКНУТЫЙ ЭЛЕКТРОДВИГАТЕЛЬ”
1. Исходные данные
Параметры нагрузочных диаграмм и данные исполнительного механизма
|
Исходные данные | 5 |
| Тип крана | КЛ-75/19,1 |
| Грузоподъёмность (кН), Fн | 191 |
| Вес ковша (кН), Fк | 39 |
| Минимальная скорость подъёма/спуска (м/с), vmin | 0,04 |
| Максимальная скорость подъёма/спуска (м/с), vmax | 0,16 |
| Количество ступеней регулирования | 4 |
| КПД редуктора (%), | 78 |
| Передаточное число редуктора, iр | 168 |
| Диаметр барабана (м), Dб | 0,36 |
| Высота подъёма (м), Hп | 15 |
| Допустимое ускорение (м/с2), aдоп | 0,8 |
| Момент инерции барабана (кгм2), Jб | 233 |
Питающая сеть переменного тока ~3-TN-S, 380 В, 50 Гц.
2. Расчетная часть
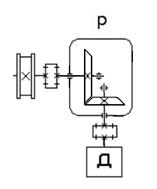
2.1 Определить приведенные значения статических моментов и момента инерции исполнительного механизма.
2.2 Определить предварительно мощность двигателя и выбрать его по каталогу.
2.3 Произвести расчёт и выбор элементов силовой цепи электропривода.
2.4 Рассчитать и построить естественную механическую характеристику электродвигателя.
2.5 Рассчитать и построить механические характеристики при максимальном, среднем и минимальном значениях скорости движения.
2.6 Рассчитать и построить механические характеристики при рекуперативном торможении.
2.7 Оценить необходимость применения обратной связи для стабилизации угловой скорости вала электродвигателя (изменение скорости не должно превышать ±15% при изменении момента сопротивления на валу в пределах номинального момента электродвигателя). При необходимости рассчитать требуемый коэффициент усиления обратной связи,
2.8 Рассчитать и построить кривые изменения угловой скорости, момента и тока при пуске и остановке электродвигателя; определить длительность переходных процессов.
2.9 Проверить предварительно выбранный двигатель по нагреву и перегрузке.
2.10 Определить КПД электропривода за цикл работы.
2.11 Разработать принципиальную электрическую схему электропривода и дать описание её работы. Схема управления должна обеспечивать автоматическое выполнение заданного режима работы, ручное регулирование скорости вращения, необходимые виды защиты электрооборудования.
2.12 Выбрать аппаратуру управления, защиты и сигнализации. Составить перечень элементов
3. Графическая часть
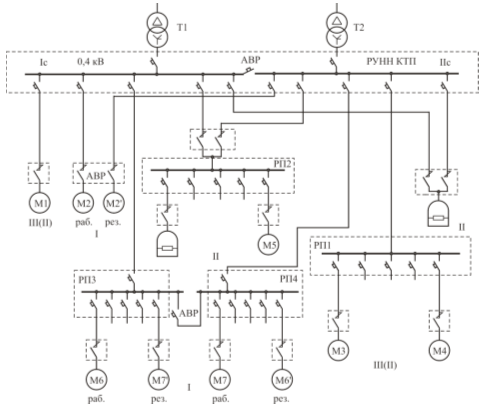
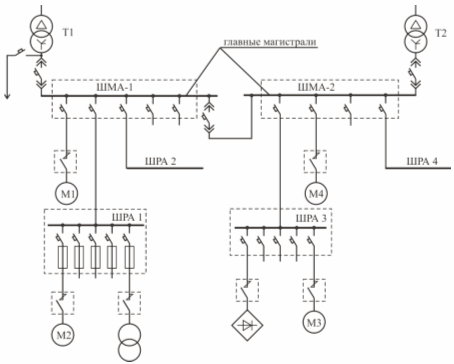
3.1 Принципиальная электрическая схема электропривода.
3.2 Электромеханические и механические характеристики двигателя.
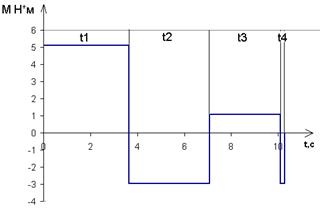
3.3 Нагрузочная диаграмма исполнительного механизма.
3.4 Нагрузочная диаграмма и тахограмма электропривода за полный цикл работы.
СОДЕРЖАНИЕ
Введение
1. Определение приведенных значений статических моментов и момента инерции исполнительного механизма
2. Определение предварительной мощности двигателя и выбор его по каталогу
3. Расчёт и выбор элементов силовой цепи электропривода
4. Расчёт и построение естественной механической характеристики электродвигателя
5. Расчёт и построение механических характеристик при максимальном, среднем и минимальном значениях скорости движения
6. Расчёт и построение механической характеристики при рекуперативном торможении
7. Оценка необходимости применения обратной связи для стабилизации угловой скорости вала электродвигателя
8. Расчёт и построение кривых изменения угловой скорости, момента и тока при пуске и остановке электродвигателя; определение длительности переходных процессов
9. Проверка предварительно выбранного двигателя по нагреву и перегрузке
10. Определение кпд электропривода за цикл работы
11. Разработка принципиальной электрической схемы электропривода, описание её работы
12. Выбор аппаратуры управления, защиты и сигнализации, составление перечня элементов
13 Список литературы
ВВЕДЕНИЕ
Широкое внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах, являются одной из важнейших задач народного хозяйства. Крановое оборудование при этом представляет собой одно из основных средств сокращения тяжелого физического труда.
Подавляющее большинство грузоподъёмных машин, изготовляемых отечественной промышленностью, имеет электрический привод механизмов, и поэтому эффективность действия и производительность этих машин в значительной степени зависят от качественных показателей используемого кранового электрооборудования. Современный крановый электропривод за последнее время претерпел существенное применение в структуре и применяемых системах управления.
Большинство грузоподъёмных кранов характеризуются постоянно меняющимися условиями использования при переработки грузов, и поэтому механизмы кранов, имеющие в своём составе электроприводы, должны быть в максимальной степени приспособлены к постоянно видоизменяющейся работе с грузами, разнообразными по массе, размерам, форме, и в условиях производственных помещений или на открытых грузовых площадках.
Для наиболее массовых кранов общего назначения начинают широко применяться электроприводы на основе короткозамкнутых двигателей, значительная часть кранов изготовляется с управлением с пола, а быстроходные краны для тяжелых режимов работы комплектуются различными тиристорными системами, обеспечивающими глубокое регулирование скорости, плавности пуска и торможения при постоянно повышающихся требованиях к экономии энергоресурсов.
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... управляют последовательностью их действия и обеспечивают отвод жидкости из сливных полостей в бак. Кроме того, распределительные устройства реверсируют гидродвигатели и регулируют их скорость. В гидросистемах строительных машин применяют главным образом золотниковые распределители. По числу присоединенных каналов золотниковые распределители делят на двух-, трех- и четырехходовые. Для управления ...
... сети, тип выбранной КТП, ее комплектацию и компоновку. 3.6 Выбор схемы силовой сети цеха Внутрицеховые сети выполняют по радиальной, магистральной или смешанной схемам. На выбор схемы влияют категория потребителей по надежности электроснабжения, взаимное расположение ЭП по площади цеха, их единичная мощность, связанность электроприемников единым технологическим процессом и характеристика ...
... В помещениях электролизного производства, в том числе на преобразовательной подстанции, должна предусматриваться громкоговорящая и (или) телефонная связь, в соответствии с принятой системой обслуживания на предприятии (опытно-промышленной установке). 7.10.39. Для контроля за режимом работы серии ванн в помещениях корпусов, станций (цехов) электролиза или на преобразовательной подстанции должны ...
0 комментариев