Навигация
Отладка систем реального времени
46909
знаков
0
таблиц
7
изображений
К.А. Костюхин, НИИСИ РАН
1. Введение1.1. Основные определения
Предметом настоящего обзора является отладка систем реального времени.
Под системой реального времени (СРВ) мы понимаем систему, в которой корректность функционирования зависит от соблюдения временных ограничений.
Существующие СРВ являются многозадачными. Многозадачность реализуется через многопроцессность*) и многопоточность.
Под процессом понимается держатель ресурсов (например, память, данные, дескрипторы открытых файлов), которые не разделяются с другими процессами. В рамках одного процесса выполняются один или несколько потоков. Они совместно используют ресурсы процесса.
Многопроцессность в СРВ имеет существенные недостатки, поскольку требует поддержки времени выполнения для доступа к памяти, и, следовательно, при переключении контекстов системе нужно выполнить дополнительные действия.
Многопоточность - это наиболее распространенный подход при проектировании систем реального времени, при котором СРВ представляет собой один процесс, в рамках которого запущено несколько потоков.
Недостатком многопоточности является возможность модификации чужих данных какой-либо задачей (из-за отсутствия защиты). В связи с этим в СРВ представлены средства синхронизации, то есть средства, обеспечивающие задачам доступ к разделяемым ресурсам. К таким средствам относятся семафоры (бинарные и счетчики), мьютексы, очереди сообщений (см. [1],[3],[25]).
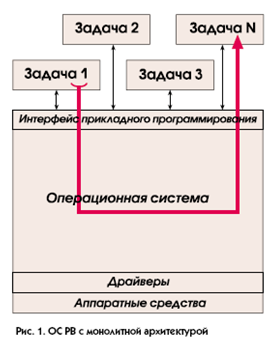
Структура СРВ приведена на рис.1, где прикладной код - это совокупность пользовательских потоков управления, ОСРВ - операционная система реального времени, обеспечивающая планирование, синхронизацию и взаимодействие пользовательских потоков управления.
 Рис. 1. Структура системы реального времени
Рис. 1. Структура системы реального времени
Будем называть распределенную систему распределенной системой реального времени (РСРВ), если корректность ее функционирования зависит также и от ограничений, накладываемых на время обмена между компонентами системы.
1.2. Особенности отладки в системах реального времени
Отладка в СРВ направлена на обнаружение и исправление ошибок в прикладном коде. Она является одним из этапов кросс-разработки, схему которой можно представить следующим образом. Разработка приложения ведется как минимум на двух машинах: инструментальной и целевой. На инструментальной платформе происходит написание исходного текста, компиляция и сборка. На целевой - загрузка приложения, его тестирование и отладка.
Ввиду того, что целевая платформа, как правило, обладает более ограниченными ресурсами, чем инструментальная, отладка распределенных систем реального времени может быть двух видов.
Первый из них - имитация архитектуры целевой платформы, то есть возможность отладки целевых программных средств без использования самой платформы. Подобная имитация, как правило, не дает возможности провести подробное и полное тестирование ПО. Поэтому, такой тип отладки применяется только в случае отсутствия целевой платформы.
Второй способ - удаленная отладка (кросс-отладка). Кросс-отладка позволяет использовать ресурсы инструментальной системы при изучении поведения некоторого процесса в целевой системе.
Эффективность удаленной отладки зависит от типа связи инструментальной и целевой машин, а также от поддержки средств отладки со стороны целевой архитектуры.
Ключевым требованием к средствам отладки является возможность наблюдать и анализировать весь процесс выполнения отлаживаемых задач, а также системы в целом. В данной работе рассматриваются два метода отладки: активная отладка и мониторинг.
Суть активной отладки состоит в том, что отладчик имеет право останавливать выполнение задачи или всей системы, начинать или продолжать выполнение с некоторого адреса, отличного от точки останова, изменять значения переменных и регистров, и.т.д. Недостаток этого метода заключается в том, что отладчик может вносить серьезные сбои в нормальную работу системы в связи с устанавливаемыми временными ограничениями. Этого можно избежать, остановив некоторую группу задач или всю систему целиком, о чем будет подробнее сказано ниже. Преимущество метода состоит в возможности корректировать поведение задачи в процессе ее выполнения.
Под мониторингом понимается сбор данных о задаче (значения регистров, переменных, и.т.д) или о системе в целом (стадии выполнения задач, происходящие события, и.т.д).
Осуществлять сбор данных помогает псевдо-агент (набор инструкций, встроенных в код задачи). Обычно его добавляют на этапе проектирования. Простой пример псевдо-агента - вызов assert, позволяющий вести диагностику работы задачи.
В процессе мониторинга отладчик практически не вмешивается в работу системы, обеспечивая нормальное ее функцирование, но вместе с тем не имеет возможности влиять на ход выполнения отлаживаемого приложения.
1.3. Ошибки в системах реального времени
Отмеченные выше методы отладки позволяют выявлять и устранять ошибки следующего характера:
Ошибки в программном обеспечении, влекущие неправильное выполнение задачи (безотносительно времени). Обычные ошибки, обнаруживаемые средствами активной отладки. Эти средства будут рассмотрены в разделе 2.
Ошибки в ОСРВ: ошибки планирования, синхронизации и связи.Для отладки, в этом случае, надо использовать один из способов мониторинга. Подробно средства мониторинга описаны в разделе 3.
Логические ошибки, связанные с асинхронностью. Пример такого рода ошибок и способы их устранения будут приведены в разделе 4.
Ошибки, связанные с тем, что данные задачи были изменены другой задачей. Локализацию ошибок лучше проводить, используя мониторинг, а именно: осуществлять периодический контроль целостности данных, временно запрещать другим задачам доступ к некоторым участкам кода или данных.
Похожие работы

... запрошенный ею ресурс, произошло связанное с ней внешнее событие, исчерпался заданный интервал времени и т. п. Заканчивая рассмотрение основных принципов планирования задач, необходимо отметить, что тема эта далеко не исчерпана. Диапазон систем реального времени весьма широк, начиная от полностью статических систем, где все задачи и их приоритеты заранее определены, до динамических систем, где ...
... элементов, глобальное пространство имен, а также лавинообразную первоначальную загрузку сети. Таким образом ОСРВ SPOX имеет необходимые механизмы для создания отказоустойчивой распределенной операционной системы реального времени, концепция построения которой описана в главе 2. 4.3 Аппаратно-зависимые компоненты ОСРВ Модули маршрутизации, реконфигурации, голосования реализованы как аппаратно- ...
... ресурсов компьютера между пользователями и задачами (система разделения времени) будет создана программная разработка планировщика задач, в котором главной целью является успеть среагировать на происходящие события в жестко заданный интервал времени (система реального времени). На основе планировщика будет реализован протокол, требующий поддержки реального времени. Для проектирования его ...


... режимы работы устройства под управлением прикладной программы в естественном режиме, например, нажимая на кнопки мобильного телефона (рисунок). 2 Отладочные средства БИС 2.1 Средства разработки электронных схем Средства предназначены для ускорения внедрения разработок, ориентированных на использование схем программируемой логики. Рис. 1 Средства разработки Cостав средств: ...
0 комментариев