Параллельные или накопительные (регистры памяти, хранения);
Аналоговые, цифроаналоговые (ЦАП), аналогово-цифровые (АЦП) преобразователи. Операционный усилитель (ОУ), компаратор
Цифроаналоговые преобразователи
Микропроцессоры и микроЭВМ
Понятие о микроЭВМ на примере однокристального микроЭВМ серии К1816
Цифровые измерительные приборы (ЦИП). Структурная схема. Основные характеристики
Цифровые измерительные преобразователи
Мосты постоянного и переменного тока
Резонансные методы измерения параметров цепей
Цифровые автоматические приборы с микропроцессором. Цифровые мультиметры
Навигация
Цифровые измерительные преобразователи
Автоматизация измерений, контроля и испытаний
104677
знаков
15
таблиц
32
изображения
6. Цифровые измерительные преобразователи
6.1 Мосты постоянного и переменного тока
Преобразователи сопротивления, индуктивные и емкостные преобразователи. Преобразователи сопротивления, индуктивные и емкостные преобразователи широко применяются при измерении различных неэлектрических величин. Кроме того, измерение параметров линейных, электрических цепей необходимо в радиотехнике при наладке и ремонте аппаратуры и контроле радиодеталей.
В радиоэлектронике и устройствах телекоммуникационных систем используются два основных метода преобразования линейных параметров цепей: прямой и уравновешивающий.
Цифровой измерительный прибор прямого преобразования представляет сочетание аналогового преобразователя какого-либо параметра элемента в активную величину и соответствующего цифрового прибора для ее измерения. Их классификация производится в зависимости от вида промежуточного преобразования.
Цифровые измерительные приборы уравновешивающего преобразования представляют собой цифровые мосты постоянного (для измерения R) или переменного (для измерения R, L и С) тока. Одним из самых простых методов измерения R, L, С является преобразование их в напряжение. Исследуемый двухполюсник включают в измерительную цепь, питание которой осуществляется от источника образцового тока или напряжения. Второй способ цифрового измерения R, L, С параметров основан на предварительном преобразовании их значений в частоту гармонического сигнала. В этом случае исследуемый элемент включается в частотно-зависимую цепь, определяющую частоту колебаний генератора (источника).
В практике измерений R, L, С широкое распространение получили методы развертывающего преобразования. Они основаны на формировании определенной развертывающей функции, аналитическое выражение которой включает в себя измеряемый параметр, и в фиксации моментов времени, когда она достигает заранее заданных значений. Измеренный интервал времени оказывается функционально связанным с преобразуемым параметром. Данные преобразователи отличаются высокой точностью, быстродействием, линейностью функции преобразования, удобным для преобразования в цифровой код видом выходного сигнала (частота/, период Т или временной интервал At). Рассматриваемый метод применяется обычно в сочетании с предварительным преобразованием параметров R, L или С в напряжение. В этом случае развертывающая функция также представляет собой напряжение.
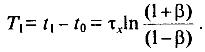
Структурная схема простейшего преобразователя параметров R, L, С в период меандрового сигнала показана на рис. 27., а.
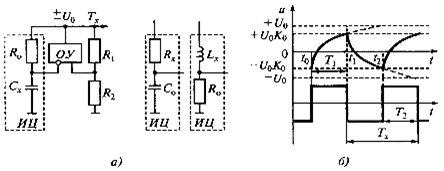 |
Рис.27. Измерительный преобразователь параметров R,L,C в период:
а)- структурная схема; б)- временные диаграммы
Измерительная цепь (ИЦ) интегрирующего типа с постоянной времени tx = R0CX (или RxCо, или Lx/Rо)) питается напряжением с выхода операционного усилителя (ОУ), являющегося компаратором (устройством сравнения). Порог его срабатывания задается резистивным делителем Rt и R2 (коэффициентом передачи цепи положительной обратной связи). Временные диаграммы работы преобразователя параметров приведены на рис 27.б.
При подаче с выхода ОУ на ИЦ в момент времени t0 напряжения U0 происходит его интегрирование измерительной цепью. Развертывающая функция на инвертирующем входе ОУ имеет следующий вид:
![]()
(23)
гдеβ = R2/(R{ + R2) — коэффициент передачи цепи положительной обратной связи.
При достижении этой функцией порогового значения +βUo в момент времени t1, срабатывает компаратор на ОУ, изменяя на выходе знак напряжения U0 на противоположный. Интервал времени интегрирования
| (24) |
На следующем интервале времени Т2 = t2- t{ происходит формирование развертывающей функции с противоположным знаком производной. Очевидно, что при равенстве положительного и отрицательного порогов срабатывания |+β Uo| = |-β Uo| интервалы T1, и Т2 равны. При этом период меандрового напряжения на выходе ОУ определяется выражением.
| (25) |
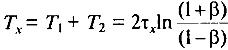
Результат измерения периода Тх пропорционален значению определяемого параметра Rx (или Сх, или Lx).
Цифровые измерительные приборы, построенные по методу развертывающего преобразования, получили широкое распространение при измерении параметров электрических цепей; их погрешность измерения составляет 0,005...0,1%.
Наряду с методами преобразования в практике используются также методы уравновешивающего преобразования Rx, Сх и Lx— параметров.; Сравнение измеряемой величины с образцовой чаще всего осуществляв ется путем уравновешивания мостовой измерительной цепи, в одно из плеч которой включается исследуемый двухполюсник. В смежное плечо моста включается образцовый элемент, представляющий собой набор квантованных образцовых мер, соответствующих весовым коэффициентам разрядов используемого цифрового кода. Изменением параметров образцового двухполюсника добиваются равенства нулю напряжения в измерительной диагонали. Уравновешивание моста может быть как следящим, так и развертывающим.
Достоинствами таких ЦИП являются высокая точность и широкий динамический диапазон. К их недостаткам относится низкое быстродействие, обусловленное необходимостью применения контактных ключей для формирования с высокой точностью параметров образцового двухполюсника.
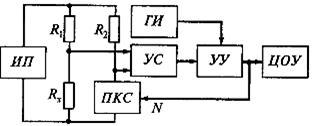
На рис.28 показана структурная схема цифрового моста постоянного тока уравновешивающего типа для измерения активного сопротивления резистора или другого элемента с оммическими потерями.
Измеряемый резистор Rх образцовые резисторы R1, и R2 и преобразователь кода в сопротивление (ПКС) образуют мост, который питается источником постоянного напряжения (ИП). Разбаланс моста фиксируется устройством сравнения (УС). Устройство управления (УУ) анализирует выходной сигнал УС и в зависимости от его знака увеличивает или уменьшает; цифровой код N, выдаваемый на ПКС. Уравновешивание производится до тех пор, пока напряжение в выходной диагонали моста не станет меньше порога чувствительности УС. При этом измеряемое сопротивление
![]()
(25)
где КПКС = Rпкс /N— коэффициент преобразования ПКС; Rпкс — сопротивление ПКС.
Как следует из формулы (25), результат измерения (он фиксируется цифровым отсчетным устройством — ЦОУ) не зависит от напряжения питания моста.
Изменение пределов измерения происходит путем изменения отношения сопротивлений резисторов R1 и R2 цепи положительной обратной связи. Точность измерения определяется стабильностью сопротивления образцовых резисторов R1 и R2 и точностью ПКС.
Цифровые мосты постоянного тока обеспечивают погрешность измерения около 0,01% и широко используются для точного измерения активного сопротивления.
 |
Более сложными являются мосты переменного тока, предназначенные для измерений комплексного сопротивления, индуктивности и емкости при определенной фиксированной частоте (обычно 1 кГц). Эти мосты выполняют уравновешивание по двум параметрам, т.е. производят раздельное и независимое уравновешивание двух составляющих комплексного сопротивления Zx.
Рис.28. Структурная схема цифрового моста постоянного тока уравновешивающего типа
Похожие работы
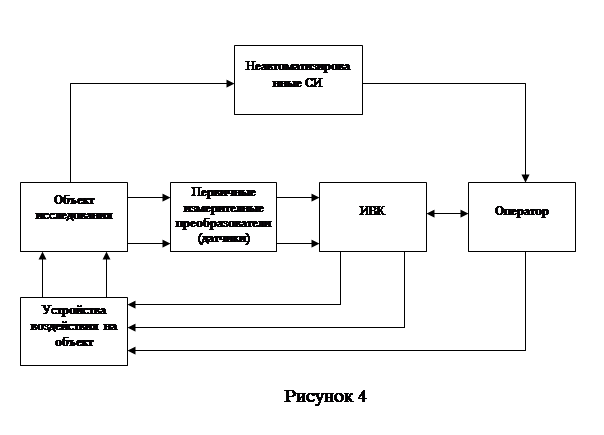
... на объект измерения, оценку точности измерений и представление результатов измерений в стандартной форме. ИВК по назначению классифицируются на: 1) типовые – для решения широкого круга типовых задач автоматизации измерений, испытаний и так далее; 2) специализированные – для решения уникальных задач автоматизации измерений; 3) проблемные – для решения широко распространенной, но ...


... 6 Определение предела дополнительной допускаемой погрешности измерения (), связанной с изменением сопротивления измерительного (стеклянного) электрода и (или) электрода сравнения (вспомогательного электрода) 9.6 + + Примечания 1 Знак "+" означает, что операцию проводят. 2 Для приборов, предназначенных для работы в режиме измерения , операцию по пункту 3 таблицы при первичной ...
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...
... и периодического профиля диаметрами 6-40 миллиметров, предназначенную для армирования железобетонных конструкций. Стандарт содержит сертификационные требования к термомеханически упрочненной арматурной стали для железобетонных конструкций. Требования к методам испытаний стали арматурной устанавливает следующая нормативная документация: 1 ГОСТ 12004-81 «Сталь арматурная. Методы испытания на ...
0 комментариев