Навигация
Построение и описание обобщённой функциональной и структурной схем системы автоматизации
31450
знаков
1
таблица
14
изображений
5. Построение и описание обобщённой функциональной и структурной схем системы автоматизации
Обобщенная функциональная схема системы стабилизации разрежения сушильного барабана
На схеме приняты следующие обозначения: УМ–усилитель мощности; ИМ–исполнительный механизм; РУ–регулирующее устройство; РО–регулирующий орган; ОУ–объект управления; ДТ–датчик температуры.
РО, КД и ДТ образуют объект регулирования. Блоки БФЗР, УМ, ИМ составляют регулирующее устройство.
В соответствии с исходными данными для проектирования РУ должно быть ПИ-регулятором. ПИ-закон регулирования формируется блоком БФЗР.
На схеме приняты следующие обозначения: З – задатчик; ВФЗР – блок формирования закона регулирования; РП – регулятор положения; УМ – усилитель мощности; ИМ – исполнительный механизм; ДП – датчик положения; РУ – регулирующее устройство; РО – регулирующий орган; ОУ – объект управления (сушильный барабан); ДР – датчик разрежения; х – регулируемая величина; у – регулирующая величина; g – задающее воздействие; ε = g – х – отклонение регулируемой величины от задающего воздействия.
РО, КД и ДР образуют объект регулирования. Блоки БФЗР, РП, УМ, ИМ, ДП составляют регулирующее устройство.
РУ в соответствии с заданием на проектирование должно обеспечить ПИ-закон регулирования. Формирователем ПИ-закона является БФЗР. Для исключения искажения закона регулирования все последующие после БФЗР блоки РУ должны быть в динамическом отношении усилительными звеньями.
Это условие выполняется для УМ. Блок ИМ в динамическом отношении является интегрирующим звеном с передаточной функцией
![]()
где ТИМ – постоянная времени исполнительного механизма.
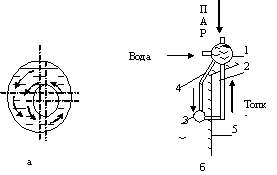
Для «превращения» ИМ из интегрирующего в усилительное звено и исключения вносимых им искажений в закон регулирования исполнительный механизм вместе с УМ охвачены отрицательной обратной связью. Причем, в цепи обратной связи включен датчик положения вала ИМ, а в прямой ветви – пропорциональный регулятор положения. Структурная схема ИМ, охваченного жесткой обратной связью, приведена на рис. 3.
Датчик и регулятор положения являются усилительными звеньями с передаточными функциями WДП(р) = КДП и WРП(р) = КРП соответственно.
Поскольку на практике, как правило, выполняется условие
![]() >
> ![]() , (14)
, (14)
то динамические свойства рассматриваемого (см. рис. 5) встречно-параллельного соединения определяются только усилительным звеном обратной связи, а передаточная функция ИМ, охваченного жесткой обработкой связью будет равна
![]() . (15)
. (15)

Рис. 3. Структурная схема исполнительного механизма, охваченного жесткой отрицательной обратной связью
Для улучшения выполнения условия (14) обратной связью охватывают также РП и УМ.
Динамические свойства датчика разрежения регулирующего органа характеризуются усилительным звеном, а объекта управления – апериодическим звеном с запаздыванием (см. исходные данные на проектирование).
С учетом вышеизложенного структурная схема системы автоматизации, реализующей Пи-закон регулирования, принимает вид, показанный на рис. 4, на котором обозначено:
![]() – передаточная функция (ПФ)
– передаточная функция (ПФ)
усилительного звена БФЗР;
![]() – ПФ интегрирующего звена БФЗР;
– ПФ интегрирующего звена БФЗР;
![]() – передаточная функция
– передаточная функция
регулятора положения;
![]()
![]() – ПФ усилителя мощности; (16)
– ПФ усилителя мощности; (16)
![]() – ПФ исполнительного механизма;
– ПФ исполнительного механизма;
![]() – ПФ датчика положения;
– ПФ датчика положения;
![]() – ПФ регулирующего органа;
– ПФ регулирующего органа;
![]() – ПФ объекта управления;
– ПФ объекта управления;
![]() – ПФ датчика разрежения.
– ПФ датчика разрежения.
Используя принципы преобразования структурных схем, получим передаточную функцию системы автоматизации в следующей последовательности.
1. Передаточная функция БФЗР
![]()
2. ПФ регулирующего устройства
![]()
или с учетом (15)
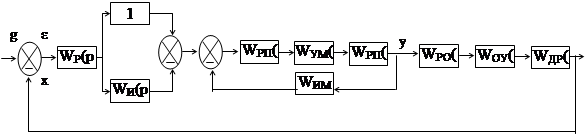 |
Рис. 4. Структурная схема системы стабилизации разрежения в топке котла
![]()
3. Передаточная функция объекта
![]()
а с учетом (16)
![]() . (17)
. (17)
Похожие работы
... .. И тогда все строительно-монтажные работы котельной при работе на газе-дегазации составят 157,04 тыс.руб., а стоимость оборудования составит 1872,92 тыс.руб. Таблица 3.2 Расчет договорной цены на строительство котельной Стоимость работы, тыс.руб. при работе: № Наименование затрат Обоснование на угле на газе от дегазации 1 2 3 4 5 1. Базисная сметная стоимость ...
... механизация и автоматизация производственных процессов; применение теплоизоляции котла и установки экранирующего кожуха для снижения температуры воздуха в помещении котельной и уменьшения теплового облучения рабочих. Производственное освещение В котельной предусматривается два вида освещения: естественное и искусственное. Освещение котельной осуществляется естественным образом, в дневное время ...
... кг/с Gсет*(t1-t3)/ (i2/4,19-tкб)* 0,98 7,14 9,13 2,93 0,48 Р16 Количество конденсата от подогревателей сетевой воды Gб кг/с Дб 7,14 9,13 2,93 0,43 Р17 Паровая нагрузка на котельную за вычетом расхода пара на деаэрацию и на подогрев сырой воды, умягчаемой для питания ...
... и сигнализация нарушений и аварийных ситуаций с их протоколированием; Возможность дистанционного управления регулирующими исполнительными механизмами; Надежность. Для более эффективного функционирования системы автоматизации можно предъявить к Scada-пакету следующие требования: Контроль над технологическим процессом, состояние технологического оборудования и управление процессами и ...
0 комментариев