Навигация
Выбор типового регулятора АСР и определение параметров его настройки
42265
знаков
7
таблиц
11
изображений
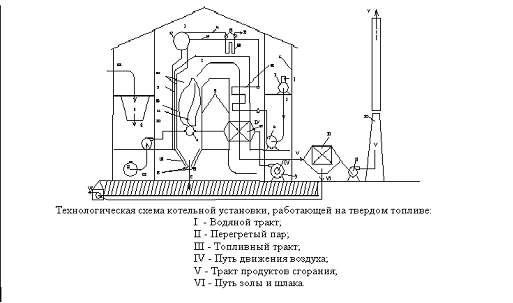
4. Выбор типового регулятора АСР и определение параметров его настройки
В любой АСР управляющее воздействие на объект регулирования формируется автоматическим регулятором в соответствии с принятым алгоритмом регулирования и требуемым качествам АСР.
Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
Существует множество методик выбора регулятора. Воспользуемся методикой, основанной на анализе вида передаточной функции объекта регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
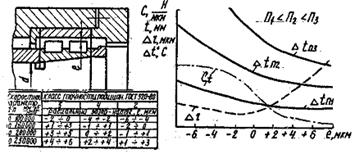
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τо/То<0.1);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τо/То<0.1;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τо/То<1;
ПИД – регуляторы при условии τо/То<1 и малой колебательности исходных процессов.
В нашем случае (АСР влажности) подходящим является ПИ-регулятор, т.к. по условиям задачи на объект действуют возмущения, вызывающие отклонения уровня, соответствующие 5 % при перестановке регулирующего органа и по виду переходного процесса и передаточной функции. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и следовательно, более дорогой) ПИД - регулятор, который имеет лучшие показатели регулирования.
5. Анализ динамических характеристик АСР с типовым регулятором
Принято для расчета переходных процессов АСР технологических объектов (химических, металлургических, а также предприятий стройиндустрии) применять метод расчета переходных процессов по возмущению со стороны регулирующего органа. Задание регулятору определяется как правило по показателям качества конечного продукта (или полупродукта), поэтому задание регулятора не меняют, а процесс регулируют посредством воздействия на регулирующий орган, через который, как правило, идут основные возмущения. Определяем переходный процесс АСР по возмущающему воздействию на регулирующий орган. В этом случае передаточная функция замкнутой системы определяется по формуле
Wз (p) = Wоб (p) / (1 + Wоб (p) * Wрег (p))
Регулирующий орган и объект регулирования представлены передаточной функцией (5.2).
Wоб (p) = Ко * е – τ*р / (То p + 1)
В программном продукте Simulink передаточная функция Wоб(р) представлена последовательно соединенными звеньями: апериодическим и звеном запаздывания (рис.6).

Рис. 6. Структура объекта регулирования в программном продукте Simulink.
ПИ-регулятор представлен двумя, суммирующимися в итоге, звеньями: пропорциональным Wп(р)=Kp и интегрирующим Wи = 1 / Ти * p . Передаточная функция регулятора, таким образом, определяется по формуле (5.3):
Wрег (p) = Wп + Wи = Кр + 1 / Ти * p
где Wп – усилитель
Wи – интегратор
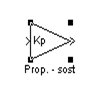

В программном продукте Simulink структура регулятора будет выглядеть следующим образом
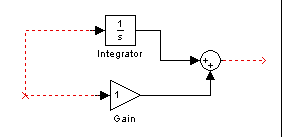
Рис.5. Структура ПИ-регулятора в программном продукте Simulink.
Структурная схема АСР, соответствующая ее функциональной схеме с обобщенным объектом регулирования и обозначенным регулятором представлена на рисунке 5
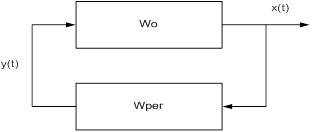
Рис. 6 Структурная схема АСР.
Данная схема детализируется для расчета замкнутой АСР и приводится к виду
 | |||||
![]()

| |||||||
| |||||||
| |||||||
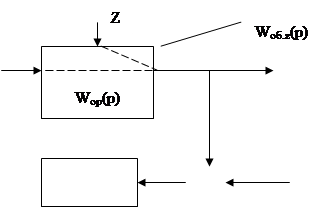
Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора
В качестве выходной величины системы рассматривают чаще управляемую величину х (отражающую для технологических объектов параметр качества конечной продукции или полуфабриката), либо отклонение управляемой величины от заданного значения ![]() (ошибка управления).
(ошибка управления).
В качестве входной (возмущающей) величины замкнутой системы управления рассматривают:
а) возмущения со стороны регулирующего органа – по каналу управления ув (перемещение выходного сигнала исполнительного механизма, равное перемещению регулирующего органа);
б) внешнее возмущения Z;
в) возмущение по заданию х0, связанная с изменением заданного значения управляемой величины.
Передаточные функции замкнутой системы при равенстве нолю других входных воздействий имеют следующий вид:
а) по каналу управления (возмущение со стороны регулирующего органа) Хвх.с.=Ув:
![]() ,
,
б) при внешнем возмущении Хвх.с.=Z:
![]() ,
,
в) при возмущении по заданию Хвх.с.=Х0, если выходная величина – управляемая величина:
![]() .
.
Учитывая, что для большинства технологических процессов стройиндустрии характерны возмущения со стороны регулирующего органа, будем придерживаться формулы
По условию задачи обобщенный объект регулирования, представляющий последовательное соединение апериодического звена первого порядка и звена запаздывания, выражается следующей передаточной функцией:
![]() ,
,
где k0 – коэффициент передачи объекта;
T0 - постоянная времени объекта;
![]() - запаздывание объекта.
- запаздывание объекта.
Передаточная функция ПИ-регулятора представлена параллельным соединением пропорциональной (Kp=75) и интегральной (1/(Tиp)) составляющих, где Tи= 0,1 :
![]() .
.
С помощью специальных символов программного продукта Simulink создаем схему расчета переходного процесса по возмущению со стороны регулирующего органа

Рис. 8 Структурно-математическая схема расчета переходного процесса по возмущению со стороны регулирующего органа в программном продукте Simulink.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
... и сигнализация нарушений и аварийных ситуаций с их протоколированием; Возможность дистанционного управления регулирующими исполнительными механизмами; Надежность. Для более эффективного функционирования системы автоматизации можно предъявить к Scada-пакету следующие требования: Контроль над технологическим процессом, состояние технологического оборудования и управление процессами и ...
... газифицируется, а второй консервируется. РЕЦЕНЗИЯ на дипломный проект студента энергетического факультета Гомельского государственного технического университета им. П.О. Сухого Соловьева Виталия Николаевича на тему: "Перевод на природный газ котла ДКВР 20/13 Речицкого пивзавода." В данном дипломном проекте произведен расчет по переводу котла ДКВР 20/13 с мазута на природный газ и ...
... центра для котельных установок. Создание такого центра обусловлено техническим заданием руководства УЖКХ, для того чтобы иметь постоянный контроль за процессом работы котельных установок в режиме реального времени. Диспетчерский центр должен находиться в здании УЖКХ п. Варламово. 3.1 Аппаратная часть В состав аппаратной части входи входят: а. Компьютер б. сетевая карта в. модем ...
0 комментариев