Навигация
6. Анализ качества системы
Под качеством САУ понимают показатели качества переходного процесса и ошибку в установившемся состоянии. К показателям качества переходного процесса относятся:
- время установления tуст – это промежуток времени, за который переходной процесс впервые достигает установившегося значения;
- время регулирования tп.п (переходного процесса) – время, за которое переходная характеристика становится и остается по абсолютной величине меньше наперед заданной величины перерегулирования s.
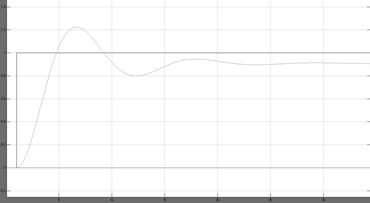
находим:
hmax=1,22; hуст=0.907; tуст=3,41; tпп=13,6;
Вычислим перерегулирование:
 .
.
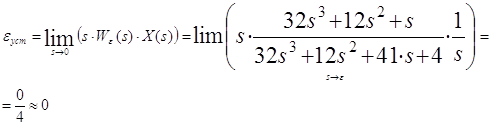
7. Вычисление установившейся ошибки
Точность САУ определяется видом входного воздействия, параметрами и структурой системы. Ошибку системы в установившемся режиме можно вычислить, используя передаточную функцию по ошибке.
![]() .
.
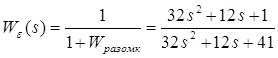
Передаточная функция по ошибке:
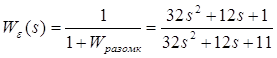 .
.

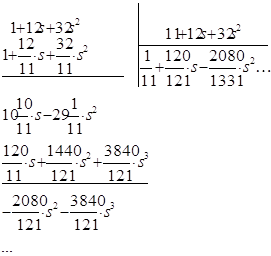
Коэффициенты ошибок:

8. Методы повышения точности
К числу общих методов повышения точности систем автоматического регулирования относятся:
1) увеличение коэффициента разомкнутой системы;
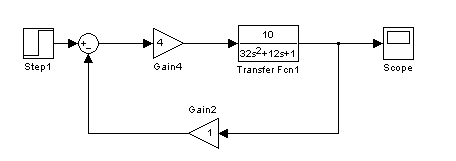
Рисунок 9.1 – Схема системы с увеличенным коефициентом усиления разомкнутой системы.
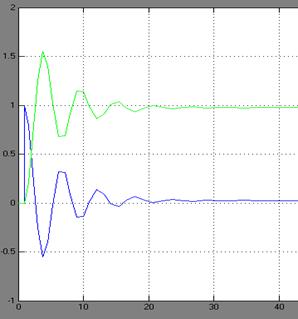
Рисунок 9.2 – Ошибка системы после использования 1го метода повышения точности
![]() .
.
Передаточная функция по ошибке:
 .
.

2) включение в систему изодромного звена;
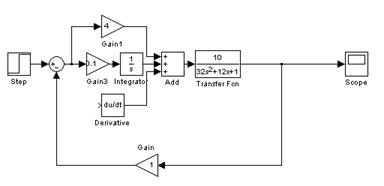
Рисунок 9.3 – Схема системы с использованием изодромного звена.
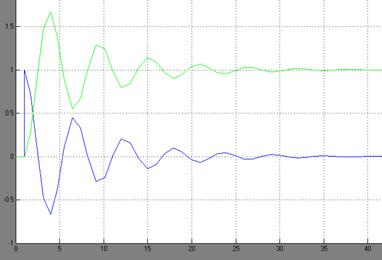
Рисунок 9.4 – Ошибка системы после использования 2го метода повышения точности
Передаточная функция изодромного звена имеет вид:
![]()
![]() .
.
Передаточная функция по ошибке:
 .
.
3) ПИД регулятор:
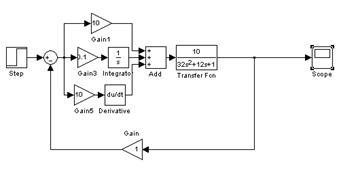
Рисунок 9.5 – Схема системы с использования ПИД регулятора
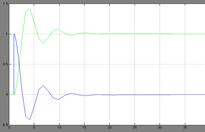
Рисунок 9.6 – Ошибка системы после использования 3го метода повышения точности
9. Синтез САУ с применением последовательного корректирующего звена
Задача синтеза последовательного корректирующего устройства (ПКУ) заключается в следующем. Имеется исходная система автоматического управления, структура и параметры элементов которой известны. Требуется определить передаточную функцию ПКУ, включение, которого в систему обеспечит получение нужных показателей качества: величины перерегулирования, времени регулирования, ошибки в установившемся режиме.
Алгоритм синтеза последовательного КУ
1) построение ЛАХ исходной разомкнутой системы;
2) построение желаемой ЛАЧХ по заданным показателям качества (время регулирования, запас устойчивости по амплитуде и фазе, степень астатизма, коэффициенты ошибок, коэффициент усиления);
3) определение передаточной функции корректирующего устройства:
![]()
![]()
![]()
На основании приведенного алгоритма синтезируем корректирующее устройство для приведенной выше системы.
Построение исходной ЛАЧХ
1) на частоте ![]() откладываем значение
откладываем значение
L=20*lgK=20*lg10=20
2) определяем частоты сопряжения
![]() :
:
 ,
,
3) через точку ![]() ,
, ![]() под наклоном 0 ДБ/декаду, так как в исходной системе нет астатизма (нет свободной s в знаменателе), проводим линию до пересечения с линией
под наклоном 0 ДБ/декаду, так как в исходной системе нет астатизма (нет свободной s в знаменателе), проводим линию до пересечения с линией ![]() ;
;
4) так как выражение ![]() стоит в знаменателе, то дальше кривая пойдет под наклоном –20ДБ/декаду до пересечения с линией
стоит в знаменателе, то дальше кривая пойдет под наклоном –20ДБ/декаду до пересечения с линией ![]() ;
;
5) выражение ![]() стоит в знаменателе, поэтому, начиная с частоты
стоит в знаменателе, поэтому, начиная с частоты ![]() и до
и до ![]() , кривая пойдет под наклоном –40ДБ/декаду.
, кривая пойдет под наклоном –40ДБ/декаду.
Построение желаемой ЛАЧХ
Прежде, чем приступить к построению желаемой ЛАЧХ, необходимо задаться желаемыми показателями качества:
- перерегулирование ![]() ;
;
- время регулирования ![]() ;
;
- порядок астатизма ![]() ;
;
- коэффициент ошибки по скорости ![]() ;
;
По заданным показателям качества ЛАЧХ строится в такой последовательности:
1) Определяем коэффициент добротности по скорости
![]()
Откладываем на оси частот величину ![]() и через эту точку проводим прямую под наклоном –20ДБ/декаду, так как степень астатизма желаемой системы
и через эту точку проводим прямую под наклоном –20ДБ/декаду, так как степень астатизма желаемой системы ![]() .
.
2) Определяем частоту среза. Для этого по известному значению ![]() определяем величину
определяем величину ![]() , а по величине
, а по величине ![]() определяем величину
определяем величину
![]() .
.
Отсюда вычисляем значение частоты положительности
![]()
Тогда частота среза выбирается из диапазона ![]() . В нашем случае
. В нашем случае
wср=(0,6¸0,9)wп=0,8·wп=0,8·9,425=7,54.
3) Определяем сопрягающие частоты. По зависимости значения перерегулирования ![]() от запаса устойчивости по модулю определяем значение запаса устойчивости по модулю
от запаса устойчивости по модулю определяем значение запаса устойчивости по модулю
![]()
Через точку ![]() проводим линию под наклоном –20ДБ/декаду.
проводим линию под наклоном –20ДБ/декаду.
Следующий этап построения – сопряжение частот, которое проводится по типовым наклонам характеристик:
При этом желательно, чтобы в области больших частот желаемая ЛАЧХ была аналогична исходной (ее наклон).
Высокочастотный участок образуется асимптотой с наклоном (-40)дБ/дек, что соответствует наклону исходной ЛАХ в этой области. Это делается для того, чтобы желаемая ЛАХ как можно меньше отличалась от исходной, то есть для упрощения корректирующего устройства.
ЛАХ желаемой системы построена по типовым наклонам 20-40-20-40
Частоты w*1 ,w*2 ,w*3 ,w*4 определяем графически:
w*1=0,125; w*2=1,13; w*3 =30.
Для ЛАХ запишем:
![]()
Передаточная функция корректирующего устройства запишется следующим образом:
 ,
,
где 
Все построения приведены ниже.
Моделируем систему в среде MatLab:
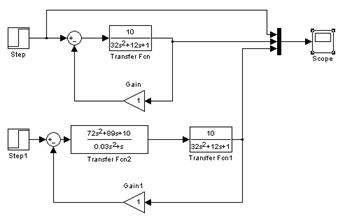
Рисунок 10.2 – Модель системы в среде MatLab
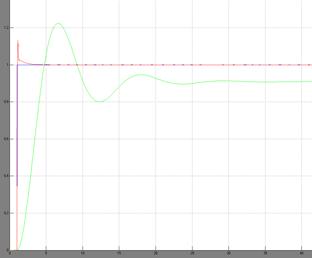
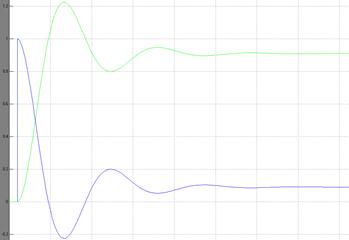
Рисунок 10.3 – Переходной процесс скорректированной системы
Рассмотрим переходные процессы исходной и усовершенствованной систем. Очевидно, что введение ПКУ существенно улучшило показатели качества САУ. Перерегулирование не превышает 13% (хотя в исходной САУ – 22%), время регулирование – 0,25с (в исходной САУ – 13,6с), время установления – 0,1с (в исходной САУ – 3,41с).
Заключение
В данной курсовой работе был рассмотрен пример синтеза системы. Построив функциональную схему системы и проанализировав звенья, вошедшие в её состав, мы получили структурную схему САУ и построили её модель в среде разработки MatLab. В ходе исследования свойств системы, мы рассчитали её устойчивость и проанализировали качество и точность. Для улучшения показателей полученных в результате расчетов качества системы, был применен метод синтеза САУ с применением последовательного корректирующего звена. Это позволило добиться следующих показателей качества скорректированной системы: время переходного процесса уменьшилось с 13,6с до 0,25с, перерегулирование – со значения 22% понизилось до 12%.
Таким образом, можно сделать вывод, что спроектированная в данной работе САУ отвечает требованиям по устойчивости, точности в установившемся режиме и требованиям к качеству переходных процессов.
Похожие работы
... часть микрофлокулянта растворяется в воде, в результате, вязкость последней возрастает. Из проведенных можно сделать следующие выводы: все функциональные химические вещества активно и в большой степени влияют на обезвоживание волокнистой массы. однако, характер влияния у них отличен: флокулянт, деаэратор, катионная смола уменьшают водоудержание и по степени воздействия их можно расположить в ...

... , преобразования их в цифровую форму, передачей их в ПК через параллельный порт и последующей обработки этих данных разработанной программной системой автоматического контроля технологических параметров. 9.2 Структура лабораторного стенда Лабораторный стенд основывается на интегральной микросхеме аналого-цифрового преобразователя 572ПВ4, которая представляет собой 8-ми канальную 8-ми ...

... целого документа по его частям; определение материалов письма или печати (например, выполнена ли запись пастой, содержащейся в конкретном стержне авторучки) и др. В технико-криминалистическом исследовании документов широко применяются различные устройства, основанные на использовании невидимых лучей электромагнитного спектра, светофильтры, рентгеновские приборы и радиоактивные индикаторы, а ...

... Федерации и г.Москвы в области охраны окружающей среды. Влияние проектируемого объекта на окружающую природную среду допустимо. Реализация проекта возможна. III. Управление и эксплуатация торгового центра 3.1 Ход реализации проекта Заказчик (Инвестор) выполнил следующие инвестиционные исследования: · Формирование инвестиционного замысла; · Его предварительное согласование; · ...
0 комментариев