Навигация
Анализ качества САУ при случайных воздействиях и их оптимизация
6171
знак
2
таблицы
10
изображений
Предмет:
«Теория автоматического управления статических систем»
Тема:
«Анализ качества САУ при случайных воздействиях и их оптимизация»
Анализ качества САУ при случайных воздействиях
Так как устойчивость линейных систем является свойством системы и не зависит от характера воздействия, то устойчивость при случайных воздействиях определяется также, как и для детерминированных.
Качество систем при детерминированных воздействиях оценивается с помощью показателей качества, таких как tp, s, T и т.д. При случайных воздействиях они теряют смысл, так как входные и выходные величины являются случайными функциями времени и при исследовании рассматривают не сами процессы, а их статистические свойства, т.е. определяют не мгновенные значения процессов, а их средние значения.
При случайных воздействиях ошибка системы e(t) = x(t)-y(t) также является случайной величиной, при этом используют ее усредненное значение – среднюю квадратичную ошибку
 (1)
(1)
Эта ошибка используется для оценки точности или качества систем при случайных воздействиях.
Недостатки средней квадратичной ошибки:
1.Она обеспечивает минимум не мгновенного, а среднего значения, при этом мгновенное значение может быть недопустимо большим.
2. Она недооценивает малые ошибки и придает чрезмерное значение большим ошибкам, так как ее значение возводится в квадрат.
Расчет ошибок с САУ при случайных воздействиях
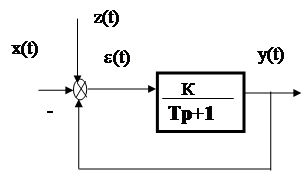
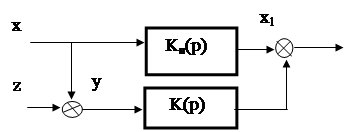
Рассмотрим порядок расчета ошибок в системах управления при случайных воздействиях. Пусть задана система, приведенная на рис.1.
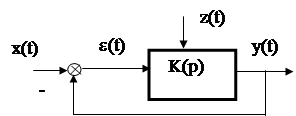
Рис.1
Необходимо определить величину средней квадратичной ошибки -e если заданы Sxx(w) и Szz(w).
Рассмотрим несколько случаев.
Пусть действует только полезный сигнал x(t) а помеха z(t) отсутствует.
Спектральная плотность ошибки определяется соотношением:
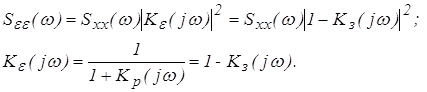 (2)
(2)
Величина средней квадратичной ошибки -e определяется по формуле:
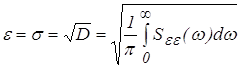 . (3)
. (3)
Значения интеграла от спектральной плотности табулированы и могут быть вычислены через коэффициенты полиномов выражения для спектральной плотности.
Пусть действует только помеха z(t) а полезный сигнал x(t) отсутствует.
Действие помехи рассматривается на выходе системы.
Спектральная плотность ошибки при этом определяется соотношением:
 (4)
(4)
3. Пусть действует и полезный сигнал x(t) и помеха z(t) и они не коррелированны.
Суммарная спектральная плотность ошибки при этом определяется соотношением:
![]() (5)
(5)
 |
Пример 1. Для приведенной ниже системы (рис.2), определить величину средней квадратичной ошибки -e, если заданы Sxx(w) = c2 и Szz(w) = 0.
Рис. 2
Если сигнал и помеха некоррелированны, то суммарная спектральная плотность ошибки при этом определяется соотношением:
 .
.
Значения интеграла от спектральной плотности вычислим через коэффициенты полиномов выражения для спектральной плотности.
Величина средней квадратичной ошибки -e определяется по формуле:
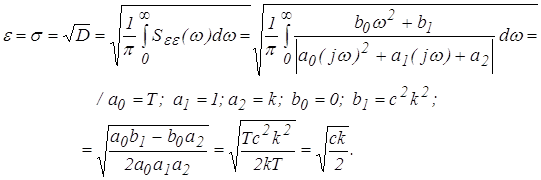 .
.
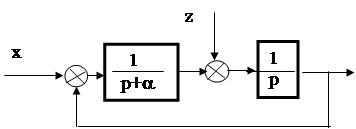 |
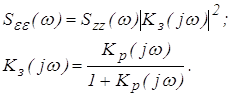
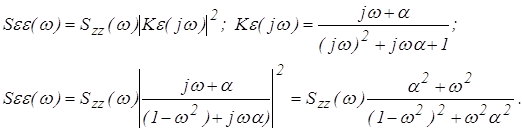
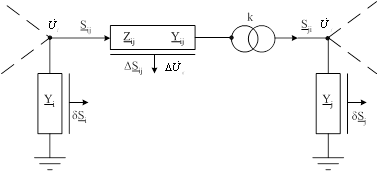
Пример 2. Для системы приведенной на рис.3 определить спектральную плотность ошибки, вызванную действием помехи -z(t) со спектральной плотностью
|
Рис. 3
Решение: Спектральная плотность ошибки определяется из соотношений:
Статистическая оптимизация систем управления
При статистических исследованиях систем решаются задачи оптимизации, т.е. определение систем наилучших в определенном смысле (по точности, быстродействию, надежности и т.д.).
Оптимальной системой называют систему, обеспечивающую экстремум некоторого функционала, называемого критерием оптимальности.
При статистической оптимизации систем решаются следующие задачи:
Задача анализа.
Задача синтеза.
Задача анализа
Формулировка задачи
Дано: система с заданной структурой; статистические характеристики полезного сигнала x(t) и помехи z(t).
 |
Определить: параметры системы, обеспечивающие минимальную величину средней квадратичной ошибки.
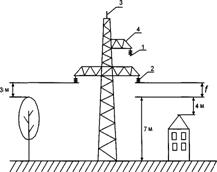
Рис.4
Схему исследуемой системы можно представить в виде, показанном на рис.1. При этом Ки(р) – передаточная функция идеальной системы, которая определяет закон преобразования полезного сигнала.
В системах, находящихся под действием случайного (или регулярного) входного сигнала и помехи возникает задача отделения сигнала от помехи и подавления (фильтрации) помехи. Кроме фильтрации в зависимости от оператора Ки(р) задача фильтрации сочетается с задачами:
Похожие работы

... Еловка ТМН-2500/35 ±6×1,5% Ужурсовхоз ТМН-4000/35 ±6×1,5% 2. Характеристика задачи расчета, анализа и оптимизации режимов РЭС 110-35 кВ по напряжению, реактивной мощности и коэффициентам трансформации Питающие электрические сети напряжением 110 кВ, ...
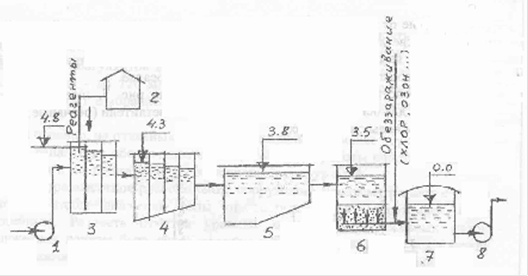
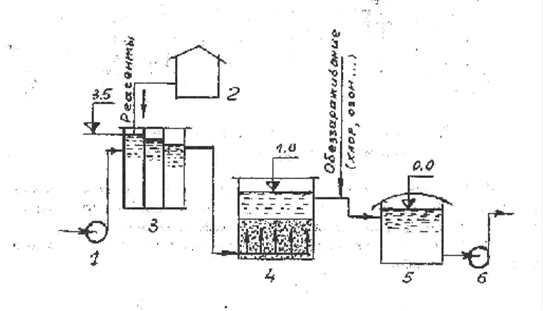
... и пропуске через «взвешенный слой» хлопьев, ранее отделенных от воды в осветлителях. Коагулирование с последующим отстаиванием и фильтрованием, а затем хлорированием воды применяют в цехе № 17 ОАО ЧМЗ. 3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ МЕРОПРИЯТИЙ ПО ПОВЫШЕНИЮ КАЧЕСТВА УСЛУГ ВОДОСНАБЖЕНИЯ 3.1. Технологическая система приготовления питьевой воды в цехе № 17 Метод обработки речной ...

... , динамические и статические, простые и сложные, естественные и искусственные, с управлением и без управления, непрерывные и дискретные, детерминированные и стохастические, открытые и замкнутые. Основы системного анализа Деление систем на физические и абстрактные позволяет различать реальные системы (объекты, явления, процессы) и системы, являющиеся определенными отображениями (моделями) ре ...
... в различных вариантах в концепциях Дж.Чу, Х.Стаппа и Д.Бома, основано на применении организмической методологии при построении физической картины мира. Ф.Капра считает, что концепции Бома и Чу “представляют собой два наиболее изобретательных в философском отношении подхода к описанию физической действительности o2'1. Он отмечает их сближение, поскольку в последующих версиях концепции “бутстрапа” ...
0 комментариев