Навигация
Біт пам’ять програм, виконана на постійному запам’ятовуючому пристрої (ПЗП) чи електрично перепрограмованій пам’яті типу „Flash”;
35036
знаков
5
таблиц
11
изображений
– 15 восьми розрядних регістрів спеціальних функцій (SFR);
– Восьми рівневий апаратний стек;
– пряма, непряма і відносна адресація даних і команд;
– 36 або 68 восьмирозрядних регістрів загального призначення (GPR);
– 64 ![]() 8 біт ПЗП з можливістю електричного перепрограмування (EEPROM) – пам’ять даних з можливістю виконання 1 млн. циклів стирання і перезапису;
8 біт ПЗП з можливістю електричного перепрограмування (EEPROM) – пам’ять даних з можливістю виконання 1 млн. циклів стирання і перезапису;
– чотири джерела переривань:
а) зовнішній вхід RB0/INT;
б) переповнення таймера TMR0;
в) зміна сигналів на лінія портів RB;
г) завершення запису даних в пам’ять EEPROM;
– збереження даних в EEPROM на протязі, як мінімум, 40 років.
Основні характеристики мікроконтролера PIC16F84А описані в таблиці 3.1.
Таблиця 3.1. Основні характеристики мікроконтролера
| Параметр | Значення |
| Максимальна частота задаючого генератора, Мгц | 4 |
| Flash-пам’ять програм, байт | 1024 |
| Пам’ять даних, байт | 68 |
| Пам’ять даних в EEPROM, байт | 64 |
| Таймери | TMR0 |
| Число джерел переривань | 4 |
| Число ліній вводу/виводу | 13 |
| Діапазон напруги живлення, В | 2,0 – 6,0 |
| Число виводів, тип корпуса | 18 DIP, SOIC |
Мікроконтролери підгрупи PIC16F8x володіють розвинутими можливостями вводу/виводу:
– 13 ліній вводу/виводу з індивідуальною установкою напрямку обміну;
– високий вхідний/вихідний струм, достатній для управління, наприклад, світлодіодом;
– максимальний вхідний струм – 25 мА;
– максимальний вихідний струм – 20 мА;
– 8-бітний таймер/лічильник TMR0 з 8-бітним попереднім подільником.
Спеціалізовані мікроконтролерні функції мають наступні властивості:
– автоматичний скид при включенні (Power-on-Reset);
– таймер включення при скиді (Power-up Timer);
– таймер запуску генератора (Oscillator Start-up Timer);
– сторожовий (Watchdog) таймер WDT з власним вбудованим генератором, що забезпечує підвищену надійність;
– економний режим Sleep.
Мікроконтролери підгрупи PIC16F8x розрізняються між собою тільки об’ємом і типом пам’яті програм. Наявність у складі підгрупи мікроконтролерів з Flash-пам’яттю полегшує створення і наступну відладку прототипів промислових зразків.
Спрощена структурна схема мікроконтролерів підгрупи PIC16F8x показана на рис. 3.2.
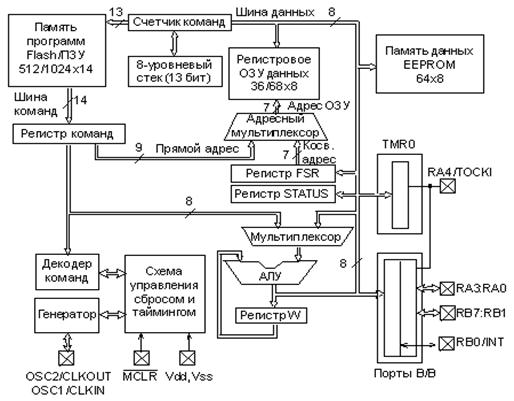
Рис. 3.2. Структурна схема мікроконтролера підгрупи PIC16F8x[10]
Архітектура ґрунтується на концепції роздільних шин та областей пам’яті для даних і для команд (гарвардська архітектура). Шина даних та пам’ять даних (ОЗП) – мають ширину 8 біт, а програмна шина і програмна пам’ять (ПЗУ) – 14 біт. Така концепція забезпечує просту, але ефективну систему команд, розроблену так, що бітові, байтові та регістрові операції працюють з високою швидкістю і з перекриттям за часом вибірок команд та циклів виконання. 14-бітна ширина програмної пам’яті забезпечує вибірку 14-бітної команди в один цикл.
Двоступеневий конвеєр забезпечує одночасну вибірку та виконання команди. Всі команди виконуються за один цикл, крім команд переходу. Програмний лічильник мікроконтролера починає працювати з нульової адреси пам’яті програм. Мікроконтролер PIC16F84А адресує 1024 ![]() 14 біт пам’яті програм. Вся пам’ять є внутрішньою.
14 біт пам’яті програм. Вся пам’ять є внутрішньою.
Мікроконтролер може прямо або непрямо звертатись до регістрів чи пам’яті даних. Всі регістри спеціальних функцій, включаючи лічильник команд, відображаються на пам’ять даних.
Ортогональна (симетрична) система команд дозволяє виконувати будь-яку команду над будь-яким регістром із використанням довільного методу адресації. Ортогональна архітектура і відсутність спеціальних виключень дозволяє зробити програмування мікроконтролерів групи PIC16F8x простим та ефективним.
Мікроконтролер містить 8-розрядний арифметико-логічний пристрій (АЛП) та робочий регістр W (див. рис. 3.2). АЛП представляє собою арифметичний модуль загального призначення і виконує арифметичні та логічні функції над вмістом робочого регістра і будь-якого з регістрів контролера. АЛП може виконувати операції додавання, віднімання, зсуву, логічні операції.
Призначення виводів мікроконтролера PIC16F84 приведені в таблиці 3.2.
Таблиця 3.2 . Призначення виводів
| Позначення | Тип | Призначення |
| OSC1 | I | Вхід кристала генератора, RC-ланки чи зовнішнього тактового сигналу. |
| OSC2 | O | Вихід кристала генератора. |
| MCLR | I/P | Сигнал скид/вхід напруги програмування. Скид при низькому рівні. |
| RA0 | I/O | Порт А (RA0...RA4) – двонаправлений порт введення-виведення. RA4/TOCKI може бути вибраний як тактовий вхід таймера/лічильника TMR0. |
| RA1 | I/O | |
| RA2 | I/O | |
| RB0 | I/O | Порт В (RB0…RB7) – двонаправлений порт введення-виведення. Можуть бути запрограмовані в режимі внутрішніх активних навантажень на лінії живлення по всім виводам. Вивід RB0/INT може бути вибраний як зовнішній вхід переривань. Виводи RB4…RB7 можуть бути програмно налагоджені як входи переривань станів на будь-якому із входів. |
| RB1 | I/O | |
| RB2 | I/O | |
| RB3 | I/O | |
| RB4 | I/O | |
| RB5 | I/O | |
| RB6 | I/O | |
| Vdd (+U) | P | Позитивна напруга живлення. |
| Vss (-U) | P | Загальний провід (заземлення). |
В таблиці використано наступні умовні позначення:
– І – вхід;
– О – вихід;
– I/O – вхід-вихід;
– Р – живлення.
Вибір мікроконтролера для розробки даного приладу, що проектується ґрунтується на кількох факторах, а саме:
1. легкість створення зручного інтерфейсу, тобто, способу „комунікації” людини з приладом: керування ним та індикацією результату, що важливо для будь-якого вимірювального приладу. Підключаємо рідкокристалічний індикатор, кнопки, а далі – все залежить від програми. Якщо потрібно щось змінити чи добавити – тільки коректуємо програму;
2. будь-який сучасний мікроконтролер може здійснити те, що на жорсткій логіці реалізується досить складно, наприклад, поділити один дріб на інший. В бібліотеці програм для будь-якого контролера ця функція вже є вбудованою;
3. звісно мікроконтролер вже містить деякі додаткові вузли, які можна, так чи інакше, використати для рішення поставленої задачі.
Використання кварцового резонатора найбільш розповсюджений спосіб включення зовнішньої схеми тактового генератора. Ця схема вимагає додатково два конденсатори ємністю від 22 пФ, щоб полегшити запуск тактового генератора. В нашому випадку, після подачі напруги живлення, вмикається тактовий генератор мікроконтролера з кварцовим резонатором, після чого мікроконтролер починає виконувати програму, записану в його запам’ятовуючому пристрої. Також кварцовий резонатор забезпечує стабільну роботу внутрішнього тактового генератора мікроконтролера.
Фільтром нашого ланцюгу живлення є звичайні керамічні конденсатори.
Світлодіод використовується для візуального контролю входження сигналізатора в режим охорони. Він вмикається після закінчення п’ятнадцяти секундної затримки.
Похожие работы
... розробленого GSM/GPS/GPRS мобільного терміналу охоронної системи для автомобіля та визначимо його основні функціональні характеристики. Призначення Розроблений пристрій – мобільний термінал охоронної системи для автомобіля – відноситься до апаратури спеціального призначення і характеризується рядом підвищених вимог щодо надійності, працездатності та захисту від несанкціонованого доступу. Ці ...
... плату 1656,8 5. Накладні витрати 8675,21 Планова собівартість: 21000 5 ОХОРОНА ПРАЦІ 5.1 Аналіз небезпечних і шкідливих виробничих факторів на робочому місці оператора. Система дистанційного контролю акустичного оточення керується та контролюються оператором ЕОМ, що розташований у звичайній кімнаті для працівників, або у спеціально ...
... і виконавчий пристрій бажано живити постійним струмом напругою 24...60 В. Мал.1.2 КТ КДПУ КП. 19.00.000.ПЗ Арк 6 Зм. Арк № Докум Підпис Дата Описані вище конструкції кодови замків мають ряд недоліків, серед яких є дуже суттєві. Для першої схеми ряд недоліків має вигляд: Занижена захисна здатність замку від ...
... 4 виконавців, тривалість виконання робіт складає 153 днів, ціна теми складає 7. Забезпечення життєдіяльності і питання екології 7.1 Аналіз шкідливих і небезпечних чинників В даній дипломній роботі і досліджений сервопривод урахуванням нелінійності. Основним місцем роботи була науково-виробнича дослідницька лабораторія (НВДЛ) №402, кафедри №301. При проведенні робіт в лабораторіях поді ...
0 комментариев