Навигация
Методика розрахунку зворотньої системи АРП
31865
знаков
1
таблица
9
изображений
2. Методика розрахунку зворотньої системи АРП
Система АРП зворотнього регулювання представляє собою не лінійну систему автоматичного регулювання. Процеси в такій системі описуються нелінійними диференційними рівняннями. Рішення цього рівняння дуже громіздке та важке, але воно суттєво спрощується при лінійній і експонціальній апроксимації регулюючої характеристики. РХ Близька до лінійній РХ властива регулюємим каскадам на польових і біполярних транзисторах, а також багатьом потенціометричним регуляторам властивих РХ, близько до експоненціальним[15].
При лінійній апроксимації РХ змінючим в процесі АРП коефіцієнт підсилення (передачі)
![]() , (2)
, (2)
де ![]() – коефіцієнт підсилення РП при управляючим напругою
– коефіцієнт підсилення РП при управляючим напругою ![]() ;
;
![]() - значення
- значення ![]() , при короткій
, при короткій ![]() вертається в нуль.
вертається в нуль.
В реальних схемах глубина регулювання обмежена, тому ![]() не бува рівним нулю. Робоча ділянка характеристики
не бува рівним нулю. Робоча ділянка характеристики ![]() розташовується віще осі напруги . Зверху він обмежений найбільшим підсиленням (
розташовується віще осі напруги . Зверху він обмежений найбільшим підсиленням (![]() .
.
Ампітудна характеристика пристроїв з АРП. Амплітуда вихідної напруги підсилювача с лінійною РХ
![]() . (3)
. (3)
При ![]() асимптотично прямує до
асимптотично прямує до ![]() при незатриманій АРП і до
при незатриманій АРП і до ![]() при затриманій АРП. В цьому випадку
при затриманій АРП. В цьому випадку ![]() - статичний коефіцієнт передачі ланцюга зворотньому зв’язку;
- статичний коефіцієнт передачі ланцюга зворотньому зв’язку; ![]() –коефіцієнт підсилення підсилювача АРП;
–коефіцієнт підсилення підсилювача АРП; ![]() – коефіцієнт передачі детектора АРП;
– коефіцієнт передачі детектора АРП; ![]() – коефіцієнт передачі фільтру АРП;
– коефіцієнт передачі фільтру АРП; ![]() - напруга затримки АРП.
- напруга затримки АРП.
В реальних системах при великих вхідних сигналах амплітудні характеристики також проходять полого, наближаючись до вказаних значень, до тих пір, поки не виникнуть значні нелінійні викривлення або перегрузки яких-небудь елементів РП або ланцюгу зворотного зв’язку, або поки не призупиниться зменшення ![]() . Після цього крутизна амплітудної характеристики різко зростає , або досягає постійності завдяки обмеження сигналу. В діапазоні
. Після цього крутизна амплітудної характеристики різко зростає , або досягає постійності завдяки обмеження сигналу. В діапазоні ![]() вихідна напруга змінюється по закону[15]
вихідна напруга змінюється по закону[15]
 . (4)
. (4)
Перехідний процес в системі АРП. При змінені любого параметру РП та ланцюгу зворотнього зв’язку в пристроях с АРП виникає перехідний процес, по закінченню якого встановлюються статистичні значення керованих величин ![]() та
та ![]() . Перехідний процес може мати коливальний характер, якщо неправильно вибрано кількість ланків ФНЧ та їх параметрів. В цьому випадку неможливий нормальний прийом сигналів.
. Перехідний процес може мати коливальний характер, якщо неправильно вибрано кількість ланків ФНЧ та їх параметрів. В цьому випадку неможливий нормальний прийом сигналів.
Найбільше широко використовуються АРП першого порядку, в яких існуює тільки одни елемент с постійною часу, значно перевищуючої постійні часу інших елементів. Звичайно таким елементом є одноланковий ФНЧ включений на виході без інерційного детектора системи АРП. Перехідний процес АРП першого порядку монотонний.
Якщо задана довжина перехідного процесу в системі АРП tАРП при перепаді амплітуди D п , то максимально допустиме значення постійної часу ланцюгу АРП можливо вибрати з умов:
![]() , (5)
, (5)
де ![]() – коефіцієнт інтенсивності зворотнього зв’язку;
– коефіцієнт інтенсивності зворотнього зв’язку; ![]() - крутизна РХ;
- крутизна РХ; ![]() - коефіцієнт передачі ланцюга зворотнього зв’язку;
- коефіцієнт передачі ланцюга зворотнього зв’язку; ![]() - амплітуда вхідного сигналу.
- амплітуда вхідного сигналу.
Коефіцієнт ![]() відповідає заданому значенню перепаду
відповідає заданому значенню перепаду ![]() амплітуд сигналу відносно мінімальної амплітуди
амплітуд сигналу відносно мінімальної амплітуди ![]() , при якій починає робити система АРП та
, при якій починає робити система АРП та ![]() . Значення
. Значення ![]() знаходить розрахунок, якщо відома аналітична залежність
знаходить розрахунок, якщо відома аналітична залежність ![]() (
(![]() ), або з графіка залежності
), або з графіка залежності ![]() (
(![]() ), який легко побудувати, використовуючи графік РП.
), який легко побудувати, використовуючи графік РП.
Викривлення модулюючого сигналу в приймачі з АРП. При не великій постійній часу виникають частотні, фазові і нелінійні викривлення модулюючого сигналу в приймачах сигналів з АМ. Рівень викривлення залежить від напруги сигналу на вході.
Мінімальне допустиме значення постійної часу ФНЧ визначається рівнянням
![]() , (6)
, (6)
де ![]() представляє собою найменше з чисел
представляє собою найменше з чисел
![]() , (7)
, (7)
![]() – допустиме значення глубини модуляції;
– допустиме значення глубини модуляції; ![]() - допустиме значення коефіцієнта гармонік;
- допустиме значення коефіцієнта гармонік; ![]() - допустиме значення фазового здвигу. Значення
- допустиме значення фазового здвигу. Значення ![]() ,
, ![]() ,
, ![]() , задають на мінімальній частоті модулюючого сигналу
, задають на мінімальній частоті модулюючого сигналу ![]() . Максимальне значення
. Максимальне значення ![]() визначають з графіку залежності
визначають з графіку залежності ![]() (
(![]() ) [15].
) [15].
Методика розрахунку. Вихідні данні: границя зміни напруги сигналу на вході приймача, допустимі границі зміни напруги сигналу на виході. Крім того, можуть бути задані швидкодія системи, рівень вносимих перехресних та лінійних викривлень модулюючого сигналу, допустимі зміни АЧХ АРП та ін. На етапі розробки структурної схеми приймача вибирають спосіб регулювання підсилення, кількість регулюємих каскадів та ділення напруги. Ретельний розрахунок системи АРП виконують після електричного розрахунку РП в начальному режимі.
Порядок розрахунку[15]:
1. Вибирають кількість регулюємих каскадів, враховуючи, що один каскад дозволяє отримати глубину регулювання від 15 до 25 дБ ( в залежності від вимог до стабільності його показників) . При цьому щоб запобігти значних нелінійних викривлень напруги сигналу на вході каскадів не повинно перевищування значення порядку 10 мВ. Якщо в приймачі каскадів УСЧ та ППЧ недостатньо для отримання заданої глубини регулювання, тоді можливо допоміжньо застосовувати регульовані дільники напруги.
2. Вибирають граничні значення струму колектора ![]() та
та ![]() , враховуючи, що для підвищення ефективності регулювання необхідно змінити
, враховуючи, що для підвищення ефективності регулювання необхідно змінити ![]() в широких межах, а для покращення інших показників данні межі слід обмежити. Треба вважати, що допустиме значення
в широких межах, а для покращення інших показників данні межі слід обмежити. Треба вважати, що допустиме значення ![]() в високочастотних транзисторах малої потужності не перевищує 3…5 мА. Звичайно вибирають
в високочастотних транзисторах малої потужності не перевищує 3…5 мА. Звичайно вибирають ![]() = 1…2 мА. Струм
= 1…2 мА. Струм ![]() в кінцевих каскадах ППЧ повинен бути не менше 0,25…0,3 мА, а в інших каскадах детекторного тракта – не менше 0,1…0,2 мА. Приведені значення являються ориєнтованими та залежать від конкретних умов. Звичайно
в кінцевих каскадах ППЧ повинен бути не менше 0,25…0,3 мА, а в інших каскадах детекторного тракта – не менше 0,1…0,2 мА. Приведені значення являються ориєнтованими та залежать від конкретних умов. Звичайно ![]()
![]()
3. Визначають коефіцієнт ![]() для кожного транзистора.
для кожного транзистора.
4. На основі результатів розрахунку РП завдяки формул
![]() ,
,
![]() ,
,
![]() .
.
Визначають максимальне та мінімальне значення добутків коефіцієнтів підсилення всіх регулюємих каскадів.
5. Знаходять значення глибини регулювання за формулою
![]() . Враховуючи розкид параметрів транзисторів та погрішності розрахунку, зменшують отримане значення на 2…4 дБ. Якщо отримане значення
. Враховуючи розкид параметрів транзисторів та погрішності розрахунку, зменшують отримане значення на 2…4 дБ. Якщо отримане значення ![]() буде меншим
буде меншим ![]() розрахованого за формулою
розрахованого за формулою ![]() необхідно збільшувати кількість регулюємих каскадів, якщо це можливо, або зменшити
необхідно збільшувати кількість регулюємих каскадів, якщо це можливо, або зменшити ![]() (в допустимих значеннях). Якщо і це не дає бажаного результату, тоді слід примінити допоміжне шунтування або відмовитись від регулювання зміни режиму та примінити регулюємі дільники напруги.
(в допустимих значеннях). Якщо і це не дає бажаного результату, тоді слід примінити допоміжне шунтування або відмовитись від регулювання зміни режиму та примінити регулюємі дільники напруги.
6. При розрахунку динамічного режиму системи АРП необхідно визначити постійну часу фільтру АРП ![]() та уточнити значення
та уточнити значення ![]() та кількість регулюємих каскадів, враховуючи вимоги до перехідного процесу та допустимі викривлення модулюючого сигналу.
та кількість регулюємих каскадів, враховуючи вимоги до перехідного процесу та допустимі викривлення модулюючого сигналу.
7. Якщо в приймальному пристрої з АРП необхідно одночасно зберегти з високою точністю закон модуляції та отримати малу постіну часу для встановлення перехідних процесів, тоді одночасно повинні виконуватись вимоги![]() ,
, ![]() . В іншому випадку необхідно відкоректувати розрахунок стаціонарного режиму, змінивши початкові данні, або застосувавши в системі АРП більш складний ФНЧ, наприклад двухланковий [15].
. В іншому випадку необхідно відкоректувати розрахунок стаціонарного режиму, змінивши початкові данні, або застосувавши в системі АРП більш складний ФНЧ, наприклад двухланковий [15].
Висновок
1. Зроблено аналіз показників та характеристик існуючих функціональних схем систем АРП.
2. Проведений порівняльний аналіз між аналоговими та цифровими системами АРП, визначено ряд переваг цифрових АРП над аналоговими:
- незалежність тривалості процесу встановлення необхідного підсилення від рівня вхідного сигналу;
- незалежність регулюючих характеристик від розбросів і конкретних властивостей ланцюга АРП і регулюємого підсилювача (при цілком цифровому виконанні);
- можливість встановлення необхідного підсилення після прийому першого імпульсу;
- астатизм і збереження встановленого підсилення при перервах у прийомі сигналу.
3. Приведені конкретні приклади регулювання підсилення та принципові схеми регулювання підсилення в системах АРП.
4. Спираючись на проведений аналіз різних схем АРП була синтезована схема ЦАРП, яка задовольняє вимогам сучасного розвитку систем РР зв’язку.
5. Приведено методику розрахуноку зворотньої системи АРП.
Похожие работы

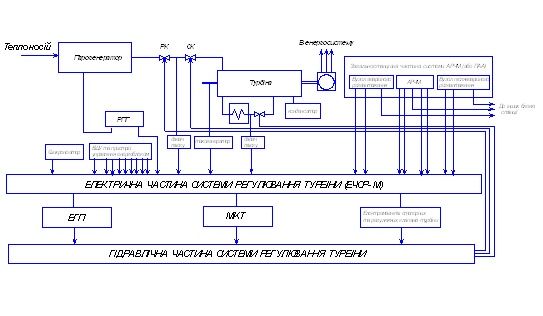
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
... /U = 24.5/24 = 1.02 А - загальний споживаний струм. Отже для живлення четвертого контролера потрібно: (1020+280)/З00 = 3.8/2 = 1.9 = 2 блока БП-21 Для функціонування системи автоматизації необхідне її електричне живлення. Проектування систем електроживлення ведуть на основі завдання на основі проектування функціональної схеми автоматизації (аркуш 1), принципових електричних схем управління, ...
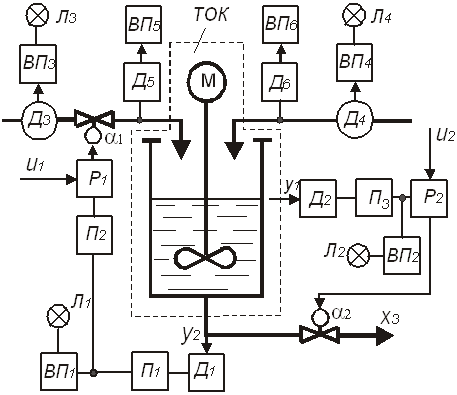
... закінчується і розробляється ескізний проект системи регулювання. 3.РОЗРОБКА АСК НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ Автоматизування змішувальної установки на основі одноконтурних систем регулювання 3.1 Принцип роботи змішувальної установки Змішувальна установка (рис. 2) призначена для неперервного змішування двох електропровідних рідин з різними концентраціями (процес запуску змі ...
... виконана розробка математичних моделей, алгоритмів і програм розрахунку числових характеристик констант в апроксимуючих залежностях. Анотація Полінський О.М. Методи автоматичного контролю та оптимізації технологічних комплексів мокрої магнітної сепарації залізних руд. - Рукопис. Дисертація на здобуття наукового ступеня кандидата технічних наук за спеціальністю 05.13.07 - автоматизація ...
0 комментариев