1. Основное технологическое оборудование для ГПМ механо-обрабатывающего производства
В состав ГПС механообработки входят: ГПС изготовления деталей типа „тела вращения", ГПС изготовления плоских деталей, ГПС изготовления корпусных деталей. В настоящем параграфе, в качестве примера, рассмотрим иерархию, состав, структуру и процесс функционирования ГПС изготовления корпусных деталей на уровне их реализации в виде ГПМ, ГПЛ, ГАУ и ГАЦ.Элементной базой ГПМ механообрабатывающего производства являются станки с ЧПУ, обрабатывающие центры (ОЦ), промышленные роботы.
Состав оборудования ГПМ определяется конструктивно-технологическими характеристиками обрабатываемых деталей, используемыми в ГПМ, АСС, АТС и ПР.
В соответствии с главными принципами построения ГПМ к основному технологическому оборудованию с ЧПУ и ОЦ предъявляются требования:
1. обработка в. автоматическом режиме значительной номенклатуры деталей при максимальной концентрации операций на отдельных единицах оборудования, что позволяет сократить количество оборудования и число переустановок, улучшить качество обработки и уменьшить продолжительность производственного цикла;
2. возможность быстрой переналадки оборудования, устройств накопления и ориентации при смене предметов производства;
3. компоновочная и программная стыковка основного оборудования с транспортно-складскими системами, измерительными установками;
4. загрузка заготовок и выгрузка готовых изделий с технологического оборудования;
5. контроль и коррекция режимов ТП в соответствии с установленным критерием оптимизации;
6. контроль геометрических размеров обрабатываемых деталей и соответствующая коррекция для достижения заданных размеров;
7. контроль за состоянием инструмента;
8. замена поломанного или изношенного инструмента;
9. сбор и удаление отходов за пределы технологического оборудования;
10. контроль наличия, расхода и других параметров технологических сред (например, смазочно-охлаждающих жидкостей);
11. поиск неисправностей (диагностика) узлов станка и системы управления;
12. осуществление связи с верхним уровнем управления по передаче управляющих воздействий и учетной информации.
Наиболее полно перечисленным требованиям отвечают станки сверлильно-фрезерно-расточной группы — обрабатывающие центры — для обработки корпусных и плоскостных деталей. В их конструкциях заложены такие принципиально важные технические решения, как автоматизация смены деталей, инструмента, автоматический контроль обрабатываемых деталей.
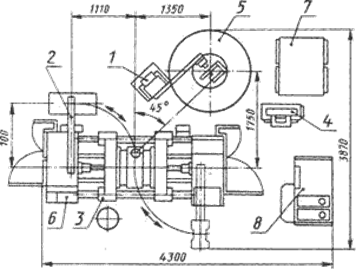
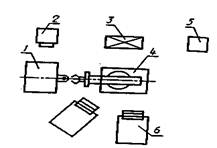
Одним из таких станков является многоцелевой горизонтально-фрезерно-расточной обрабатывающий центр модели 2204ВМФ4 (рис. 1), предназначенный для комплексной обработки корпусных деталей средних размеров с четырех сторон без переустановки.
Размеры рабочей поверхности стола - 500X400 мм. На станке можно производить получистовое и чистовое фрезирование плоскостей, пазов, криволинейных поверхностей концевыми, торцевыми, дисковыми фрезами; растачивание, сверление, зенкование, нарезание резьбы метчиками. Станок оснащен устройством для контроля угла поворота, позволяющим нарезать резьбу резцом, а также автоматически устанавливать ориентированный по углу инструмент. Поворотный стол, индексируемый с высокой точностью, позволяет расширить технологические возможности станка, в том числе обрабатывать соосные отверстия консольным инструментом.
Станок имеет бесконсольную вертикально-подвижную шпиндельную бабку, расположенную внутри продольно-подвижной стойки, поперечно-подвижный поворотный стол, устройство для автоматической смены инструмента с инструментальным магазином барабанного типа на 30 позиций, монтируемым на верхнем торце стойки. Станки оснащаются как встроенным поворотным столом без автоматической системы спутников, так и устройствами для автоматической смены спутников.
Наиболее перспективным направлением в области создания ГПМ механообработки является использование в составе данных ГПМ блочно-модульных ПР. Применение блочно-модульного принципа построения ПР позволяет из ограниченного типового ряда функциональных элементов создавать ПР различного назначения без избыточного числа степеней подвижности и устройств, упростить их конструкцию и обслуживание, сократить сроки и затраты на их изготовление, освоение, внедрение и эксплуатацию.
Примером модульного принципа создания ПР для обслуживания более 30 моделей металлорежущих станков с горизонтальной осью шпинделя является ПР (модель СМ40) с гидравлическим приводом и позиционной системой управления. Характеристики типовых модулей.
В состав элементной базы ГПМ механообработки деталей МЭА кроме оборудования с ЧПУ, ПР, ОЦ входит ряд специальных устройств (загрузочно-разгрузочные, смены инструмента, удаления отходов, смены приспособлений, контроля и диагностики), имеющих разнообразное конструктивное исполнение, принципы функционирования, варианты компоновки в составе ГПМ.
Системы ЧПУ (рис. 2.) являются наиболее распространенным типом систем управления технологическим оборудованием (станки, ОЦ, ПР) и, в свою очередь, должны рассматриваться как типовая элементная база АСУ ГПМ механообработки деталей ЭА. Она обеспечивает подготовку и ввод данных, управление движением рабочих органов станков, технологией (режимы и параметры операции, перехода), инструментом, оснасткой.
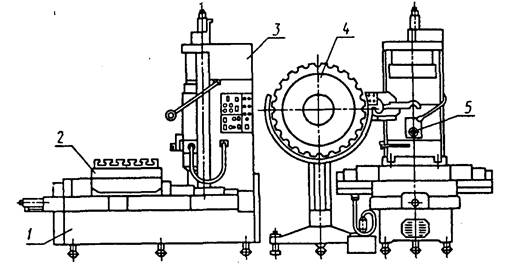
Рис. 1 - Многоцелевой горизонтальный сверлильно-фрезерно-расточной станок модели 2204ВМФ4
1— основание; 2 — стол; 3 — шпиндельная бабка; 4 — инструментальный магазин; 5 — шпиндель
.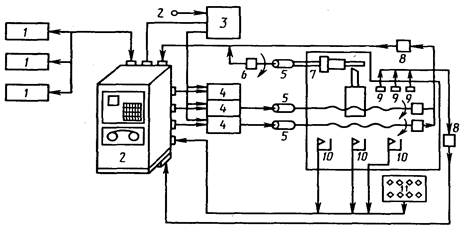
Рис. 2 - Общая структура системы с ЧПУ
1 — аппаратура связи с ЭВМ верхнего уровня, периферийные устройства ввода-вывода данных; 2 — устройство с ЧПУ; 3 — станция питания; 4 — блок управления двигателями подачи и привода главного движения; 5 — двигатели приводов подачи и привода главного движения; 6 — измерительные преобразователи перемещений рабочих органов станка; 7 — кинематическая система станка; 8 — нормирующие и согласующие блоки измерительных каналов; 9 — измерительные датчики параметров ТП; 10 — сигнальные датчики фиксированных положений рабочих органов; 11 — рабочие органы пульта управления станка
Названные модули имеют самые разнообразные компоновки., что связано с:
· производственными факторами, обеспечивающими возможность многостаночного обслуживания;
· многообразными организационно-технологическими формами производства;
· большой протяженностью технологических маршрутов;
· многообразием типов металлорежущего оборудования и станочной оснастки;
· наличием многономенклатурного измерительного и контрольного инструмента;
· большим объемом и различными видами стружки;
· наличием разметочных, контрольных и других операций по технологическому потоку.
Выбор структуры (компоновки) ГПМ механообработки в общем виде производится с учетом анализа деталей, подлежащих механической обработке; действующего ТП; основного технологического оборудования с учетом возможности его автоматизации; организационных видов производств (серийность, партионность, межстаночное транспортирование); параметров ПР; технико-экономических показателей различных видов роботизации.
Основные схемы ГПМ включают следующие группы оборудования:
· транспортное оборудование (подающее, приемо-передающее, приемное устройство);
· основное технологическое оборудование (станки, оснастка станков, режущий инструмент);
· оборудование системы управления (электро-, гидро-, пневмоэлементы автоматики, пульт управления):
· оборудование, приборы, инструменты технического контроля деталей (специальное оборудование, контрольно-измерительные полуавтоматы);
· нестандартное оборудование (кантователь, ориентатор, магазин со схватом).
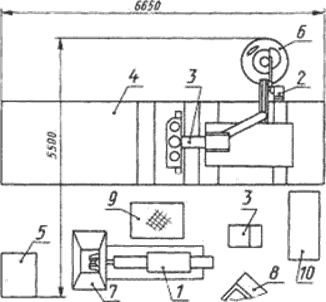
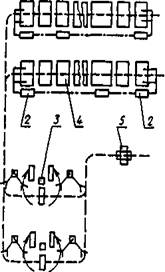
На рис. 3. показана типовая структура ГПМ механообработки модели 8М. Указанная модель ГМП предназначена для автоматизированной сверлиль-но-фрезерно-расточной обработки деталей типа „корпус" на приспособлениях-спутниках.
Характерной особенностью рассматриваемых ГПМ является наличие вспомогательного оборудования: магазин схватов (предусматривается автоматическая смена захватных устройств при подаче АТСС новых деталей или резком изменении конфигурации обрабатываемых деталей); кантователь-ориентатор (осуществляет непрерывный комплекс движений по загрузке-разгрузке оборудования, смена баз может потребовать перехват детали роботом); накопитель (складирование полуфабрикатов в тару без загрузки тары, связанной с АТСС); моечная машина; контрольно-измерительная машина.
Заготовка поступает в таре, которую располагают на приемном столе АТСС. Обработанные детали складываются в тару, которая также функционирует в системе АТСС. Управление ПР и обеспечение взаимосвязи всех устройств обеспечивается СПУ.
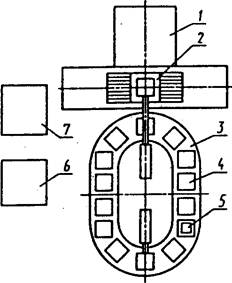
Рис. 3 - ГПМ изготовления корпусных деталей
1 — технологическое оборудование (станки типа ЛФ-260МФЗ 21103Н7Ф4, ИР-320); 2 — приемо-зажимное устройство; 3 — накопительно-подающее устройство; 4 — комплект приспособлений спутников; 5 — устройство для крепления деталей на приспособлениях-спутниках; б — устройство управления модулем; 7 — устройство связи системы ЦПУ станка с устройством управления модуля
Технические характеристики ГПМ изготовления корпусных деталей
Производительность, шт./ч 24Габаритные размеры детали, мм 300X300x300
Масса детали, кг 10
Площадь, занимаемая модулем, м2 30,0
Технические характеристики ГПМ изготовления деталей типа „тела вращения"
Производительность, шт./ч 40
Габаритные размеры детали:
длина, мм 50
диаметр, мм 100
Масса детали, кг 1,5
Площадь, занимаемая модулем, м2 10,0
ГПМ механообработки корпусных деталей в общем случае состоит из многоинструментального станка, накопителя, столов-спутников, устройства автоматической загрузки-выгрузки столов-спутников со стола станка, замены режущего инструмента, уборки стружки, контрольно-измерительной системы.
2. ГПМ механообрабатывающего производства корпусных деталейРассмотрим структуру и функционирование многономенклатурных ГПМ механообработки деталей типа „корпус" (на примере ГПЛ типа АПЛ-3-2) как наиболее сложных из всех видов ГПМ механообработки.
Конструкторско-технологическая характеристика корпусных деталей, обрабатываемых в ГПМ модели АЛП-3-2.
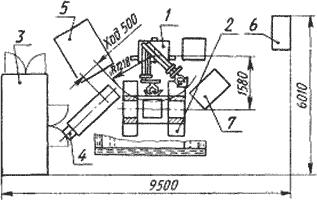
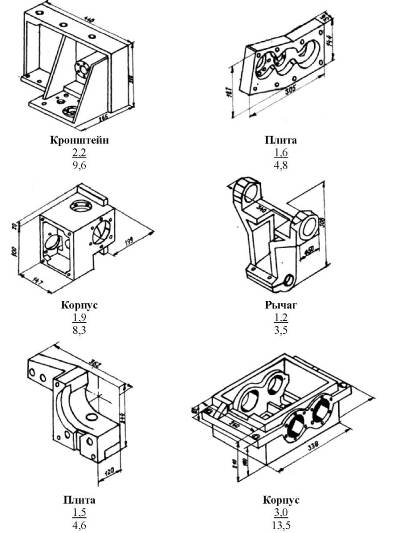
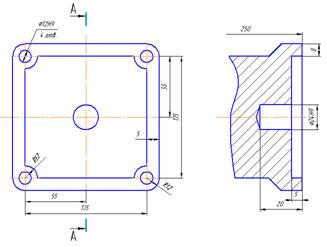
Корпусные детали (рис. 4) изготавливаются в основном литьем из алюминиевых (реже, стальных, магниевых) сплавов. Корпусные детали, изготавливаемые из поковок, обрабатываются по наружным поверхностям. В литых корпусных деталях обрабатываются наружные поверхности, которыми они стыкуются с другими деталями и узлами. Стыковочные поверхности в большинстве корпусных деталей имеют хороший доступ для обработки режущим инструментом и располагаются под углом 90°. В некоторых деталях стыковочные поверхности ограничены уступами криволинейной (цилиндрической) или прямоугольной формы, которые также подлежат обработке
В корпусных деталях имеется большое количество соединительных каналов-отверстий, отверстий сложной формы с канавками прямоугольного или фасонного профиля и крепежных отверстий с резьбой.
Большинство корпусных деталей имеют ступенчатые сквозные и глухие отверстия, а так же в некоторых корпусных деталях имеются отверстия, которыми они стыкуются при сборке с другими деталями, что вызывает высокие требования к отклонению взаимного расположения поверхностей. Что обеспечивается окончательной обработкой поверхностей специальным профилированным инструментом или на специализированных станках с ЧПУ с помощью плансуппортного устройства, управляемого по программе. К резьбовым отверстиям предъявляются повышенные требования по отклонению от соосности и перпендикулярности среднего диаметра резьбы к оси основного отверстия.
Типовой технологический процесс изготовления корпусных деталей (на уровне маршрутной технологии) включает в свой состав следующие типовые технологические операции:
· литье под давлением (в формы);
· зачистка отливки от облоя и литников;
· фрезерная обработка;
· сверлильная обработка;
· резьбонарезная обработка;
· чистовая обработка поверхностей и отверстий (снятие заусенцев);
· контроль геометрических размеров и шероховатости поверхностей.
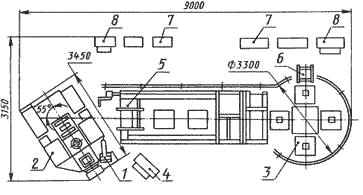
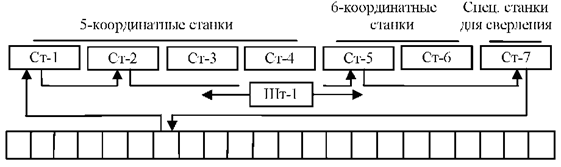
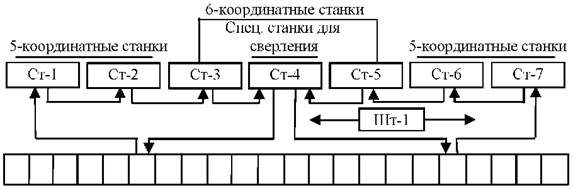
3.2 Состав и структура ГПЛ модели АЛП-3.2Комплекс АЛП-3-2 скомпонован на базе однотипных многооперационных станков с ЧПУ, которые отличаются широкими технологическими возможностями, обеспечивающими производительную обработку корпусных деталей при разнообразии их форм, размеров, технологических параметров. Станки позволяют выполнить стыковку с транспортно-накопительными системами обрабатываемых деталей и инструментов.
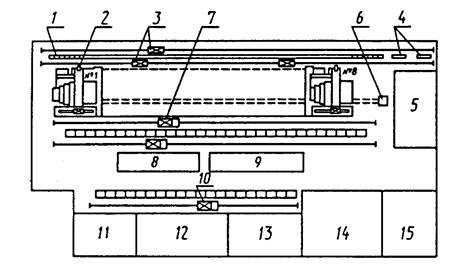
Рис. 4 - Структурная схема ГПЛ АЛП-3.2
1 — центральный накопитель инструментальных насадок; 2 — многооперационные станки с ЧПУ; 3 — инструментальные роботы-автооператоры; 4 — агрегаты подъема и спуска инструментальных кассет; 5 — участок настройки инструмента вне станка; 6 — конвейер уборки стружки; 7 — штабе-лерАТС-2; 8 — позиция загрузки-разгрузки АТС-2; 9 — позиция многооперационного контроля; 10 — штабелер автоматизированного склада; 11 —отделение комплектации заготовок; 12 — отделение окончательной доработки деталей; 13 - отделение мойки деталей; 14 — отделение окончательного контроля деталей; 15 — помещение обслуживающего персонала
В состав комплекса АЛП-3-2 (рис. 2.11) входят: четыре пятикоординатных станка СМ630Ф44, три шестикоординатные станка СМ400Ф45 с магазинами на 60 инструментов каждый; один пятикоординатный станок СТ400Ф45 с ЧПУ и автоматической сменой инструментов с магазином на 60 инструментов для глубокого сверления отверстий ружейными сверлами; АТСС обрабатываемых деталей (спутников) типа АТС-2; автоматизированная транспортно-накопительная система инструментального обеспечения станков комплекса типа СИО-1; отделение комплектации заготовок с автоматизированным стеллажом; отделение наладки инструментов и приспособлений вне станков комплекса; отделение окончательного контроля обработанных деталей; автоматизированный элеваторный склад инструментов; система автоматизированного удаления стружки; отделение ручной окончательной обработки деталей; отделение автоматизированной промывки обработанных деталей; отделение механиков по обслуживанию и наладке оборудования комплекса; отделение управляющего вычислительного комплекса (УВК); комната диспетчера и сменного мастера с центральным пультом управления комплексом.
Автоматизированная система управления АЛП-3-2 имеет двухуровневую иерархическую структуру управления, включающую: нулевой уровень локальных устройств ЧПУ станками, штабелерами, роботами-операторами и пультами операторов; первый уровень управления АТС-2 и СИО-1 и станками комплекса от УВК (ЭВМ СМ2М) через устройство связи (УСО) с объектом (с устройствами ЧПУ нулевого уровня).
В качестве устройств ЧПУ станками, штабелерами и роботами-автооператорами применяются модификации серийных устройств Н55-2Л. Первый уровень структуры комплекса технических средств (КТС) выполнен на базе двухмашинного вычислительного комплекса, состоящего из двух ЭВМ СМ2М.
Первый уровень АСУ включает специализированное устройство покадрового распределения сменного комплекта программ обработки деталей, хранящихся на магнитных дисках.
Первый уровень АСУ обеспечивает:
· управление загрузкой обрабатываемых деталей АТС-2, СИО-1, подготовкой и загрузкой в СИО-1 комплектов инструментов; разгрузкой обработанных деталей и вводом инструмента на переточку и переналадку, отображением занятости ячеек накопителей спутников и инструментов, магазинов инструментов станков и позиций ожидания спутников;
· ввод коррекции на размер инструментов, учет суммарного времени наработки и контроля целости инструмента, а также плановый пуск и останов комплекса;
· управление обработкой деталей по сменному заданию, а также обработкой внеплановых деталей.
Система управления анализирует состояние управляющей модели комплекса и, в зависимости от сложившейся ситуации, принимает решения, которые через УСО передаются на соответствующие устройства комплекса для реализации. Система управления состоит из головной программы и трех основных подсистем, которые соответственно управляют станками, АТС обрабатываемых деталей и СИО.
Головная управляющая программа осуществляет распределение машинного времени между подсистемами управления, руководит вводом и выводом информации, осуществляет сборку системы, а также реализует работу системы управления в режимах запуска, рабочем, наладочном и в режиме планового останова.
В режиме запуска система управления проверяет готовность всего оборудования и устройств комплекса к совместной работе с системой управления и выводит в исходное положение станки, штабелеры и роботы-автооператоры. К моменту запуска комплекса приемно-передающие агрегаты также должны находиться в исходном положении.
В случае неисправности отдельных устройств и станков комплекса или неготовности их для совместной работы с системой управления сменный мастер комплекса сообщает об этом оператору ЭВМ. При необходимости система управления позволяет осуществлять плановый запуск без отдельных устройств и станков, при этом комплекс может -работать без АТС-2 или СИО-1, может быть в работе только один станок (только АТС-2 или СИО-1). В случае отказа в работе АТС-2 или СИО-1 их функции может выполнять оператор-станочник, управляя отдельными агрегатами в ручном режиме. Станки комплекса в случае необходимости могут работать в автономном режиме от устройств ЧПУ с перфолентой. Система управления в рабочем режиме обеспечивает автоматическую работу комплекса. Она постоянно анализирует состояние всех систем, устройств и станков комплекса, а в случае возникновения каких-либо неисправностей или сбоев оператор ЭВМ по местной телефонной сети сообщает об этом оператору или сменному мастеру комплекса для принятия соответствующих мер. Наладочный режим работы системы управления используется в случае возникновения неисправностей в устройствах и станках комплекса. В наладочном режиме система управления останавливает работу всех подсистем управления, после чего оператору ЭВМ разрешается вводить в систему управления наладочные команды, с помощью которых производится восстановление работоспобности системы управления.
Предусмотрен как полный, так и частичный перевод системы управления в наладочный режим. Имеется возможность перевода в наладочный режим отдельно АТС-2, СИО-1 или станков, В этом случае наладочные команды можно вводить только для той подсистемы, которая находится в наладочном режиме.
Информация, вводимая в систему управления комплексом. В систему управления комплексом вводится два вида информации: условно-постоян ная и текущая. Условно-постоянная информация вводится при неработаю-ей системе. Она закрепляет номенклатуру обрабатываемых деталей на Станках комплекса и технологию их обработки. Условно-постоянная информация включает программы обработки деталей (установов). Программы обработки деталей (установов) записываются и постоянно находятся на магнитном Диске. Запись программ обработки на магнитный диск производится специальной программой с исходной перфоленты, которая пригодна для непосредственной работы от устройства ЧПУ Н55-2Л станка. Программа обработки детали, хранящаяся на магнитном диске, может при необходимости редактироваться, полностью стираться и заменяться новой.
Текущая информация вводится в систему управления во время работы комплекса и предназначена для корректировки процесса обработки деталей и изменения условий работы системы. Информация о времени обработки деталей (установов) на станках комплекса содержит время ' обработки на каждом станке, возможность передачи обработки с одного станка на другой, время обработки на другом станке. Информация о коррекциях инструмента вводится и хранится в системе управления. Возможен ввод трех видов коррекций инструмента: радиуса фрезы, длины инструмента и величины перемещения плансуппорта. Информация о смещении нуля спутника вводится в систему управления, если при обработке заготовки (установа) выявилась необходимость сместить нулевую точку спутника относительно нуля станка. Ввод коррекций при работающей системе управления производится оператором-контролером с телетайпа.
Система управления обеспечивает планово-предупредительный вывод деталей на контроль, контроль за выработкой лимита стойкости инструмента и за работой нового инструмента. В системе управления предусмотрена возможность восстановления системы после сбойных ситуаций, возникающих в ЭВМ и при рассогласованиях модели управления с состоянием станков, АТС-2 и СИО-1 комплекса.
Автоматизированная транспортно-складская система АТС-2. В АТС-2 входят стеллаж-накопитель спутников, два штабелера, восемь приемно-передающих агрегатов спутников у станков, два приемно-передающих 'агрегата у позиций загрузки-разгрузки деталей; два приемно-передающих агрегата у позиций межоперационного контроля деталей.
Стеллаж имеет 176 ячеек с ложементами для установки спутников (как с закрепленными на них деталями, так и без деталей), расположенных в два ряда по высоте. В нише, расположенной в верхней части накопителя, смонтированы механизмы подвески электрических кабелей, соединенных с электродвигателями штабелеров.
Транспортирование обрабатываемых заготовок в АТС-2 и обработка Деталей на станках комплекса производится на спутниках.
Штабелер состоит из следующих основных узлов: самоходной тележки; стойки, смонтированной на тележке; каретки с телескопическим столом, перемещающейся по направляющим стойки. Телескопический стол имеет платформу для приема спутника, которая выдвигается в обе стороны на ±760 мм. Штабелер перемещается вдоль стеллажа-накопителя и станков(по оси X} по напольным направляющим от электродвигателя постоянного тока ПБСТ-43 (N = 3,8 кВт; п = 2200 об./мин) через редуктор и зубчатое колесо, находящееся в зацеплении с зубчатой рейкой, установленной на напольной направляющей. В штабелере предусмотрено ручное перемещение вдоль стеллажа.
Перемещение каретки по направляющим стойки (по оси У) осуществляется также от электродвигателя ПБСТ-43 через редуктор, установленный на верхнем торце стойки, и винтовую передачу.
Выдвижение платформы телескопического стола (по оси Z) осуществляется от электродвигателя АОЛ-21-4 (N = 0,27 кВт; п = 1500 об./мин) через червячный редуктор, систему зубчатых колес и реек. Штабелер АТС-2 в автоматическом режиме работает от системы программного управления с выполнением стандартных циклов.
Приемно-передающие агрегаты спутников АТС-2. В качестве средств передачи спутников на станки, рабочие позиции „загрузка-разгрузка", позиции контроля и обратно применяются три типа приемно-передающих агрегатов, конструкции которых несколько отличаются друг от друга. Приемно-передающие агрегаты, расположенные у станков моделей СМ40ОФ45 и СТ400Ф45, устанавливают спутник с заготовкой в приспособление станка в вертикальном положении. В этих агрегатах поворот платформы телескопического стола со спутником из горизонтального положения в вертикальное и обратно осуществляется кантователем.
Приемно-передающие агрегаты, расположенные у станков модели СМ63ОФ44, устанавливают спутник с заготовкой в приспособление станка в горизонтальном положении, поэтому в агрегате этого типа кантователь телескопического стола отсутствует.
Приемно-передающие агрегаты, расположенные у позиций „Загрузка-разгрузка" и „Контроль деталей", имеют по три приемных позиций спутников (крайние позиции А, Е и среднюю Б). Средняя позиция Б является рабочей позицией оператора, поэтому для удобства установки и закрепления заготовки на спутнике, съема обработанной детали со спутника и проведения операций на позиции контроля, она выполнена поворотной.
Рабочие места операторов позиций „Загрузка-разгрузка" и межоперационного контроля деталей. Рабочие места оператора позиций „Загрузка-разгрузка" и межоперационного контроля деталей оснащены стойкой, на которой смонтированы устройства отображения, дисплей и телефонный аппарат для прямой связи со сменным мастером комплекса и оператором ЭВМ. На позиции контроля установлен стеллаж для хранения мерительного инструмента. Все рабочие позиции операторов оснащены пультами управления приемно-передаюшими агрегатами и пультами связи с ЭВМ.
Автоматизированная транспортно-накопительная система инструментального обеспечения СИО-1 включает: эстакаду, центральный накопитель инструментальных наладок, три инструментальных робота-автооператора, два агрегата, обеспечивающих подъем и опускание инструментальных кассет.
Список литературы
1. Харченко А.О. Станки с ЧПУ и оборудование гибких производственных систем: Учебное пособие для студентов вузов. – К.: ИД «Профессионал», 2004. – 304 с.
2. Р.И. Гжиров, П.П. Серебреницкий. Программирование обработки на станках с чпу. Справочник, - Л.: Машиностроение, 1990. – 592 с.
3. Роботизированные технологические комплексы / Г. И. Костюк, О. О. Баранов, И. Г. Левченко, В. А. Фадеев – Учеб. Пособие. – Харьков. Нац. аэрокосмический университет «ХАИ», 2003. – 214с.
4. Н.П.Меткин, М.С.Лапин, С.А.Клейменов, В.М.Критський. Гибкие производственные системы. – М.: Издательство стандартов, 1989. – 309с.
5. Гибкие робототехнические системы / А. П. Гавриш, Л. С. Ямпольский, - Киев, Головное издательство издательского объединения “Вища школа”, 1989. - 408с.
6. Широков А.Г. Склады в ГПС. – М.: Машиностроение, 1988. – 216с.
7. Проектирование металлорежущих станков и станочных систем: Справочник-учебник в 3-х т. Т. 3: Проектирование станочных систем /Под общей ред. А.С. Проникова - М.: Изд-во МГТУ им. Н.Э.Баумана; Изд-во МГТУ «Станкин», 2000. - 584 с.
8. Иванов Ю.В., Лакота Н.А. Гибкая автоматизация производства производства РЭА с применением микропроцессоров и роботов: Учеб. пособие для вузов. – М.: Радио и связь, 1987. – 464 с.
9. Промышленные роботы: Конструкция, управление, эксплуатация. / Костюк В.И., Гавриш А.П., Ямпольский Л.С., Карлов А.Г. – К.: Высш.шк., 1985. – 359 с.
10. Гибкие производственные комплексы /под.ред. П.Н.Белянина. – М.: Машиностроение, 1984. – 384с.
Похожие работы

... . Различные этапы производственного процесса на машиностроительном заводе могут выполняться в отделочных цехах или в одном цехе. В соответствии с ГОСТ 26229 гибкая производственная система (ГПС) (гибкое автоматизированное производство - ГАП) - совокупность в разных сочетаниях оборудования с ЧПУ, роботизированных технологических комплексов, гибких производственных модулей, отдельных единиц ...
... (АСК), автоматизированная система удаления отходов производства (АСУОП), автоматизированная система технологической подготовки производства (АСТПП) и автоматизированная система управления производством (АСУП). 1. Исходные данные для проектирования Сведения о продукции: корпусные детали 75-ти наименований (рис. 1.1) с габаритными размерами от 100 до 400 мм из алюминиевых сплавов типа АЛ-9, ...
... на пульте управления ГПС. Программное обеспечение САК (ПО) состоит из: 1.ПО контроля за ходом процесса изготовления на конкретных рабочих местах ГПС; 2.ПО системы контроля как подсистемы управления: Программное обеспечение САК реализует следующие функции: 1.Автоматический сбор информации о фактическом выпуске деталей на контролируемом оборудовании; 2.Автоматический учет простоев оборудования ...
... металлов. Применение этого оборудования в составе ГАУ способствует уменьшению выноса вредных веществ в окружающую среду и возврату ценных компонентов в производство. По своей организации он обеспечивает оптимизацию всех производственных процессов, в том числе поступление деталей на участок, их монтаж на технологические спутники и демонтаж, транспортирование технологических спутников по операциям ...
0 комментариев