Навигация
Методы навигационного счисления
74727
знаков
2
таблицы
5
изображений
1.4 Методы навигационного счисления
Данные методы определения местоположения транспортных средств основаны на измерении параметров движения автомашины с помощью датчиков ускорений, угловых скоростей в совокупности с датчиками пройденного пути и датчиками направления и вычислении на основе этих данных текущего местоположения подвижного объекта относительно известной начальной точки. В целом данные методы могут использоваться в тех же системах, что и методы, основанные на радионавигации. Основное их преимущество по сравнению с методами радионавигации — независимость от условий приема навигационных сигналов бортовой аппаратурой. Не секрет, что на территории современного города с плотной застройкой высокими зданиями могут встречаться участки, где затруднен прием сигналов от наземных и даже спутниковых навигационных систем. На таких участках бортовая навигационная аппаратура не в состоянии вычислить координаты подвижного объекта. Приемные антенны радионавигационных систем должны размещаться на автомашинах с учетом обеспечения наилучших условий приема навигационных сигналов. Это делает их уязвимыми для злоумышленников в случае применения для нужд охраны автомашин или перевозимых ими грузов. Существующие методы камуфлирования (маскировки) приемных антенн достаточно сложны и дороги.
Методы счисления пути и инерциальной навигации свободны от этих недостатков, поскольку аппаратура полностью автономна и может быть интегрирована в конструктивные элементы автомашины с целью затруднения их обнаружения и защиты от умышленного вывода из строя. Недостатками методов навигационного счисления можно считать:
Ø необходимость коррекции параметров движения из-за накапливаемых ошибок измерения;
Ø достаточно большие, в целом, габариты бортовой аппаратуры;
Ø отсутствие доступной малогабаритной элементной базы для создания бортовой аппаратуры (акселерометров, автономных вычислителей пройденного пути, датчиков направления);
Ø сложность обработки параметров движения.
Наиболее перспективным направлением применения подобных методов можно считать их совместное использование с радионавигационными методами, что позволит скомпенсировать недостатки, присущие как одному, так и другому методу. Систему местоопределения с использованием данного метода предлагает ЗАО «Автонавигатор». В бортовом оборудовании системы используются:
Ø датчик пути, подключаемый к спидометру автомашины;
Ø датчик направления на основе феррозондов, измеряющих отклонение оси;
Ø автомашины от магнитного меридиана Земли;
Ø датчик ускорения (акселерометр), обеспечивающий устранение ошибок феррозондового датчика, возникающих из-за негоризонтального расположения объекта относительно поверхности Земли.
Корректировка ошибок счисления производится по цифровой векторной карте полилиний транспортной сети города, что позволяет достичь точности местоопределения до единиц метров. Имеется возможность использования элементов бортового оборудования совместно с приемником GPS.[1]
2 Навигационные системы поиска и слежения
Из-за сложного экономического положения охраны и недостаточного финансирования служб навигационного обеспечения отечественные космические системы определения координат различных потребителей отошли на второй план. Этим воспользовались зарубежные фирмы, между которыми развернулась жесткая борьба за овладение российским рынком.
В последнее время навигационные системы безопасности и поиска, в которых используются сотовая связь и технология GPS, становятся отдельным направлением в автомобильной электронике. Они не только демонстрируют «чудеса техники», но и позволяют снизить расходы на страхование и обеспечивают быстрый поиск угнанного автомобиля.
В настоящее время системы поиска автомобилей продолжают развиваться. В них используются новейшие достижения в области навигации и информационных технологий, возможности и достижения военно-промьшленного комплекса.
Структурно схемы автоматического контроля можно разделить на следующие функциональные подсистемы:
Ø определение координат объекта на местности;
Ø передача данных;
Ø обработка и отображение результатов.
Для определения координат объектов в различных системах используются следующие методы:
Ø автоматическая пеленгация кодированных радиомаяков, установленных на автомобилях;
Ø установка на автомобилях навигационных приемников систем GPS или ГЛОНАСС;
Ø прием специальной аппаратурой, установленной на автомобилях, маломощных сигналов маркеров, обозначающих контрольные точки маршрута.
Во всех службах, где внедряется спутниковая навигация, снижаются эксплуатационные затраты, повышаются безопасность перевозок грузов и дисциплина экипажей. GPS позволяет мобильным подразделениям оперативных и муниципальных служб стать более «боеспособными» без увеличения количества транспорта и личного состава за счет эффективного использования имеющихся ресурсов.
Системы спутниковой навигации, оборудование которых для потребителей в последние годы значительно подешевело, являются основным применяемым методом при поиске и слежении. В подавляющем большинстве случаев системы контроля за перемещением подвижных объектов используют приемники системы Navstar(GPS), так как они наиболее распространены и дешевы. Намечающаяся перспектива появления умеренных по цене двухсистемных приемников GPS/GLONASS может в ближайшее время «подключить» отечественную систему ГЛОНАСС. Она имеет на настоящий момент целый ряд очевидных преимуществ для активного использования в рассматриваемых системах контроля.
Ввиду того, что в системе Navstar до сих пор активирован режим Selective Availability («Ограниченная доступность»), искусственно ухудшающий точность определения координат приемниками гражданского применения, в системах, использующих GPS, часто используется метод дифференциальной коррекции, обеспечивающий повышение точности определения координат. Он основан на учете при вычислениях дополнительной информации (передаваемой по дополнительному каналу связи) о состоянии атмосферы и внесенных в сигнал спутников погрешностей.
Для передачи информации с мобильных объектов о местоположении может быть использован целый ряд методов. Наибольшее число систем использует для передачи данных радиостанции (обычные или транковые), оснащенные дополнительными модемами. Существуют также системы, использующие сотовую связь (AMPS в Америке и GSM в Европе) и спутниковые каналы связи (Inmarsat, Гонец).
Попробуем выделить в общем виде типичные функции и выгоды от использования современных систем контроля за транспортом (AVL). При рассмотрении приведенного ниже списка необходимо учитывать, что некоторые немаловажные (для какого-то конкретного случая) детали могут быть упущены и некоторые из приведенных функций могут не поддерживаться аппаратными либо программным обеспечением систем, имеющихся на рынке.
Задачи, решаемые с помощью навигационных систем поиска и слежения за подвижными объектами, выглядят следующим образом:
Ø постоянная и достоверная информация о местонахождении каждого из автомобилей в реальном времени с записью протокола и возможностью последующего анализа;
Ø упрощение работы диспетчера и снижение его загрузки, что снижает вероятность принятия им ошибочного или несвоевременного решения;
Ø наглядное картографическое отображение местности с наложением маркеров, указывающих положение автотранспорта; тип маркера и его цвет могут отражать как тип машины, так и ее состояние (свободна, занята, исправна и т.д.);
Ø возможность автоматического контроля за незапланированными остановками автотранспорта, а также за выездом автотранспорта за пределы установленной рабочей зоны, что в значительной мере может содействовать снижению риска хищений материальных средств или нецелевого использования автотранспорта;
Ø возможность оперативной помощи водителям, потерявшим ориентацию, в выборе оптимального маршрута;
Ø возможность автоматизированного поиска ближайшей к заданной точке машины с возможностью дифференциации по заданным признакам, например, ближайшей свободной машины, ближайшей машины с определенным оборудованием);
Ø при наличии датчиков сигнализации и исполнительных устройств - своевременное оповещение диспетчера об угоне автотранспорта и возможности его дистанционного блокирования (например, дистанционным включением клапана, перекрывающего бензопровод); дальнейшие действия охраны правопорядка могут быть значительно облегчены ввиду наличия точной информации о местонахождении угнанного автомобиля;
Ø возможность оборудования автомобиля «тревожной кнопкой» и (или) датчиком столкновения для автоматической передачи сигнала о чрезвычайной ситуации и координат происшествия;
Ø возможность эффективной координации действий с грузополучателем и обеспечение своевременной разгрузки либо переадресации груза по возможности его приема на заранее запланированном объекте (что особенно важно при перевозке скоропортящихся грузов, например, бетона высоких марок или некоторых пищевых продуктов);
Ø уменьшение бесполезного пробега автотранспорта из-за просчетов в организации перевозок, связанных с неполной информацией о реальной обстановке, имеющейся у диспетчера;
Ø повышение эффективности использования имеющегося автотранспорта и персонала за счет более четкой организации их работы и снижении потребности в дополнительных машинах;
Ø упрощение контроля за реальным пробегом каждой из единиц автотранспорта и оценки реальных затрат при анализе экономической эффективности перевозок;
Ø большой объем объективной информации для анализа с целью выработкой наиболее рациональных маршрутов, совершенствования системы управления и т.п.;
Ø возможность автоматизированного контроля за наступлением срока регламентного обслуживания автотранспорта и более эффективного планирования его использования с учетом этой информации.
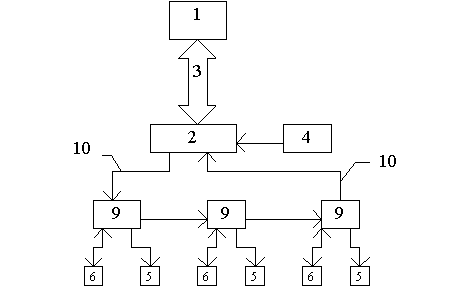
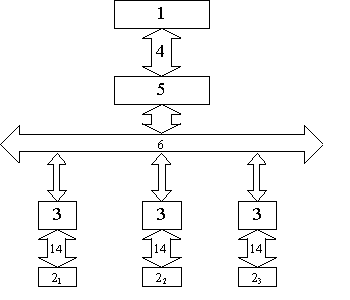
Для решения вышеперечисленных задач разработаны и применяются на практике так называемые системы слежения за движением транспортных средств AVLS (Automatic Vehicle Location System) или APRS (Automatic Position Reporting System). Работа этих систем строится по следующему принципу. В автомобиле устанавливается бортовой комплект аппаратуры, состоящий из GPS-приемника с выносной антенной, блока управления (контроллера), интерфейса (модема) и радиоприемника/передатчика (рис. 2.1). GPS-приемник регистрирует сигналы спутника и определяет текущее местоположение автомобиля. Контроллер в соответствии с заданной программой направляет эти данные через интерфейс (модем) на передатчик, который, в свою очередь, посылает в эфир сигналы. Эти сигналы напрямую или через сеть ретрансляторов (репитеров) поступают на приемник, находящийся на диспетчерском пульте, а затем — на вход персонального компьютера, снабженного специальной программой. Теперь диспетчер может увидеть текущее местоположение конкретного автомобиля на карте, получить дополнительную информацию с установленных на автомобиле датчиков (включен или выключен двигатель, закрыты ли двери и т.п.) и, более того, послать сигнал, управляющий установленными в автомобиле механизмами — например, заглушающими двигатель, закрывающими замки дверей или включающими сирену. Последнее, в сочетании со скрытой, защищенной от умышленного вывода из строя установкой бортовой аппаратуры — прекрасное, средство борьбы с угоном автомобилей. При необходимости водитель может нажать кнопку тревоги — и компьютер тут же сообщит об этом диспетчеру и покажет на карте место, откуда подан сигнал. На каком же удалении от диспетчерскогопульта может осуществляться подобный контроль? Это зависит исключительно от дальности связи, то есть от выбора средств телекоммуникации. Если система использует прямой радиоканал на выделенной частоте, радиус зоны охвата составляет 5-15 км. Если в вашем распоряжении транковый канал связи, то рабочая область системы совпадает с зоной охвата транкового оператора и составляет около 15 км в радиусе от базовой антенны. Многообещающие перспективы открывает использование в качестве средства связи сотового телефона, имеющего, например, режим передачи данных. В этом случае, особенно с учетом междугороднего и международного автоматического роуминга, зона охвата может составлять сотни километров. В Западной Европе, где сети стандарта GSM 900 и 1800 покрывают почти всю территорию, большинство разработчиков AVL - систем используют именно этот вид связи. В России, где интерес к подобным системам только зарождается, разработчики до недавнего времени были вынуждены ориентироваться только на транковую связь, изначально позволявшую передавать данные. Теперь же и российские операторы стандарта GSM стали предоставлять услуги по обмену цифровыми данными с помощью протокола SMS (короткие текстовые сообщения). Возможно, что уже в ближайшем будущем автотранспорт не сможет обходиться без системы GSM.
Различают следующие базовые варианты построения таких систем навигации:
Ø мобильный вариант персонального пользователя;
Ø мобильный диспетчерский вариант;
Ø мобильный автономный вариант.
Мобильный вариант системы для персонального пользователя включает в себя GPS – приемник с антенной, персональный компьютер для отображения текущего местоположения объекта на электронной карте местности и решения ряда оперативных задач (выбор оптимального маршрута, захват, прохождение по заранее заданному маршруту и т. д.), определяемых заказчиком системы.
Мобильный диспетчерский вариант — модификация первого варианта, дополненная возможностью передачи по, радиоканалу телеметрии о расположении объекта или группы объектов на диспетчерский пункт или несколько пунктов через систему цифровых ретрансляторов.
Наличие бортового компьютера непосредственно на подвижном объекте необязательно. Возможна работа нескольких объектов на одной частоте (оптимальное количество объектов на одном канале — 10—20) по принципу временного разделения телеметрических данных с различных машин. На диспетчерском пункте происходит отображение движения объекта по электронной карте местности. При этом возможно дополнение системы различной сервисной поддержкой: сигналы о сходе с маршрута, остановке, передача информации о состоянии узлов транспортного средства (при установке дополнительных датчиков) и т. п.
Мобильный автономный вариант представляет собой компактное устройство — «черный ящик». Он устанавливается в одном из укромных мест на автомобиле и фиксирует во встроенной памяти маршрут объекта в течение всего времени движения. После прохождения маршрута осуществляется считывание информации с устройства и маршрут восстанавливается на электронной карте. В силу того, что объем памяти последней ограничен, координаты месторасположения заносятся в ОЗУ по срабатыванию датчика движения или временному принципу.[1,2,3]
Похожие работы



... Системы обработки информации. Защита криптографическая. Алгоритм криптографического преобразования. М.: Госстандарт СССР. ГОСТ 31078-2002. Защита информации. Испытания программных средств на наличие компьютерных вирусов. Типовое руководство. СТБ ИСО/МЭК 9126-2003. Информационные технологии. Оценка программной продукции. Характеристики качества и руководства по их применению. СТБ ИСО/МЭК ТО ...
... потребностей предпринимателей (страховщиков). 2 Организация и управление международными автомобильными перевозками 2.1 Основные элементы управления транспортным процессом Транспортный процесс предприятия «Фомос» – совокупность организационно и технологически взаимосвязанных ...

... : ¾ температура, °С +25±10; ¾ относительная влажность воздуха, % 45...80; ¾ атмосферное давление, мм рт. ст. 630...800. Так как блок интерфейсных адаптеров предназначен для работы в нормальных условиях, в качестве номинальных значений климатических факторов указанные выше принимают нормальные значения ...


... , должна была показать уверенность Соединенных Штатов в своих технических возможностях и готовности к "звездной войне" сверхдержав. С легкой руки оппонентов этой системы "стратегическая оборонная инициатива президента" во всех переводах была названа стратегией "звездных войн". В основном демонстрационные испытания сводились к испытаниям длинноволновой инфракрасной аппаратуры, телескопов, ...
0 комментариев