Навигация
Контур управления выходным параметром у1(t)
7087
знаков
1
таблица
3
изображения
1.1. Контур управления выходным параметром у1(t).
Управляемая подсистема по каналу “![]() ” – элемент обратного действия. Рассогласование
” – элемент обратного действия. Рассогласование ![]() вводится в управляющее устройство в виде
вводится в управляющее устройство в виде ![]()
![]() , то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент обратного действия, поэтому элемент (р+1) матрицы должен быть со знаком минус [-(p+1)].
, то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент обратного действия, поэтому элемент (р+1) матрицы должен быть со знаком минус [-(p+1)].

![]()
![]()
![]()
![]()
![]()
![]() r1
r1
![]() r2
r2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() z1
z1 ![]() u21 u11 y11
u21 u11 y11
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() z2
z2 ![]() u22 u12 y12
u22 u12 y12
 | |||
![]() y22
y22
![]()
![]()
![]() y21
y21
![]()
![]()
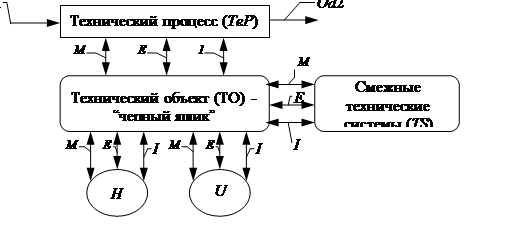
![]() Рис. 1.2. Структурная схема двумерной САУ
Рис. 1.2. Структурная схема двумерной САУ
1.2. Контур управления выходным параметром у2(t).
Управляемая подсистема по каналу “![]() ” – элемент прямого действия. Рассогласование
” – элемент прямого действия. Рассогласование ![]() вводится в управляющее устройство в виде
вводится в управляющее устройство в виде ![]()
![]() , то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент прямого действия.
, то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент прямого действия.
2. Составление уравнения динамики многомерной САУ и определение ее характеристического уравнения.
Заданные уравнения (1.2.12), (1.2.13) в общем виде можно записать как
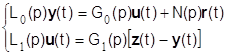 . (1.2.14)
. (1.2.14)
Исключив из системы уравнений (1.2.14) промежуточную переменную u, получим
![]() (1.2.15)
(1.2.15)
Перенося в левую часть уравнения многочлен от y(t) и оставляя в правой части многочлены от независимых переменных z(t), r(t) и учитывая, что ![]() , получим уравнение динамики
, получим уравнение динамики
![]()
![]() (1.2.16)
(1.2.16)
Характеристическое уравнение
![]() . (1.2.17)
. (1.2.17)
Задача 1.1.3
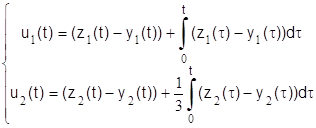
Математические модели динамических режимов управляемой и управляющей подсистем в переменных "вход–выход" описываются дифференциальными уравнениями вида:
а) управляемая подсистема
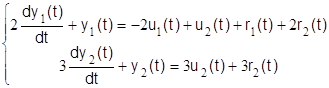 , (1.2.24)
, (1.2.24)
при нулевых начальных условиях;
б) управляющая подсистема
 , (1.2.25)
, (1.2.25)
где yi(t), ui(t), ri(t), zi(t) – выходные, управляющие, возмущающие переменные и задающие воздействия соответственно.
Задание
1. Записать данные уравнения в символической форме и представить в векторно-дифференциальном виде;
Решение
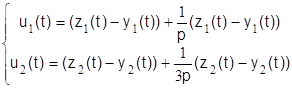
Для записи данных уравнений в символическом виде необходимо обозначение производной заменить на символ р, то есть положить ![]() , а интеграл – на
, а интеграл – на ![]() . После замены получим
. После замены получим
а) управляемая подсистема
 , (1.2.26)
, (1.2.26)
б) управляющая подсистема
 . (1.2.27)
. (1.2.27)
Вводя векторы y(t)=[y1(t), y2(t)]T, u(t)=[u1(t), u2(t)]T, r(t)=[r1(t), r2(t)]T и учитывая, что
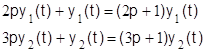 , (1.2.28)
, (1.2.28)
получим следующие уравнения:
а) управляемая подсистема
 ,
,
 . (1.2.29)
. (1.2.29)
б) управляющая подсистема
 , (1.2.30)
, (1.2.30)
которые соответствуют уравнениям (1.2.12), (1.2.13) задачи 2.
Похожие работы

... функциональных возможностей; - улучшение эргономических качеств; - улучшение эстетических качеств; - повышение чувствительности, точности, стабильности, диапазона. Цели и задачи автоматизации производственных систем Автоматизация - это совокупность организационно-технических мероприятий, обеспечивающих замену физического и умственного труда человека, затрачиваемого на планирование, ...
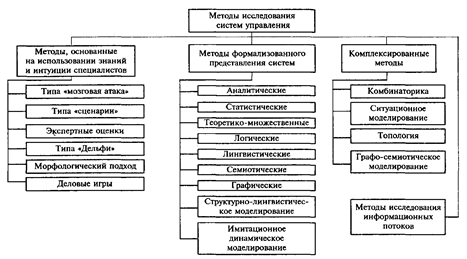
... и др. Они сформировались путем интеграции экспертных и формализованных методов. Схема классификации методов приведена на рис. 1 Рис. 1 - Классификация методов исследования систем управления 2. МЕТОДЫ ФОРМАЛИЗОВАННОГО ПРЕДСТАВЛЕНИЯ СИСТЕМ В ИССЛЕДОВАНИЯХ В настоящее время известны различные классификации методов формализованного представления систем. В результате этого методы, иногда ...



... и трещинами. Решение построено на использовании теории функции комплексного переменного и удовлетворении граничным условиям методом наименьших квадратов. 1 Термодинамические основы термоупругости 1.1 Термоупругость Основное уравнение термоупругости. При термическом расширении изотропное тело деформируется таким образом, что компоненты деформации отнесенные к системе прямоугольных осей ...
... по соответствующему полю). В окне Конструктора таблиц созданные связи отображаются визуально, их легко изменить, установить новые, удалить (клавиша Del). 1 Многозвенные информационные системы. Модель распределённого приложения БД называется многозвенной и её наиболее простой вариант – трёхзвенное распределённое приложение. Тремя частями такого приложения являются: ...
0 комментариев