1. Составление дифференциального уравнения движения механической системы
2. Определение реакций внешних и внутренних связей
3. Определение закона движения системы
4. Результаты расчетов
5. Анализ результатов вычислений
6. Результаты анализа
Выводы
Цели и задачи
Наличие упругих связей в механической системе в сочетании с внешним периодическим воздействием может привести к дополнительным колебательным движениям ее элементов. Поэтому теория колебаний и, в частности, раздел, посвященный малым линейным колебаниям, имеет много важных приложений в различных областях науки и техники.
Выделение линейных моделей в особый класс вызывается рядом причин:
• с помощью линейных моделей исследуется широкий круг явлений, происходящих в различных механических системах;
• интегрирование линейных дифференциальных уравнений с постоянными коэффициентами является, с математической точки зрения, элементарной задачей.
Поэтому инженер–исследователь стремится по возможности описать поведение системы с помощью линейной модели для облегчения процедуры анализа ее движения.
При проектировании механических систем обычно используют критические режимы внешних воздействий на них. В этом случае внешние факторы: ![]() – коэффициент демпфирования,
– коэффициент демпфирования,![]() – амплитуда и частота возмущающей силы, изменяются незначительно. Конструктивные параметры механических систем (их геометрические размеры) определяются условиями их функционирования и, следовательно, могут изменяться в очень узком диапазоне. Актуальной становится такая задача исследования механической системы, при которой могут изменяться массовые параметры системы и жесткость упругого элемента.
– амплитуда и частота возмущающей силы, изменяются незначительно. Конструктивные параметры механических систем (их геометрические размеры) определяются условиями их функционирования и, следовательно, могут изменяться в очень узком диапазоне. Актуальной становится такая задача исследования механической системы, при которой могут изменяться массовые параметры системы и жесткость упругого элемента.
Поэтому целью курсовой работы является исследование и анализ динамического поведения механической системы с упругими связями с помощью основных теорем и принципов теоретической механики.
Для достижения этой цели, необходимо решить поставленные задачи:
1. составить дифференциальное уравнение движения системы;
2. сформировать систему уравнений для определения динамических реакций внешних и внутренних связей;
3. Найти закон движения системы, т. е. проинтегрировать дифференциальное уравнение движения при заданных начальных условиях;
4. провести численный анализ полученного решения с использованием ЭВМ.
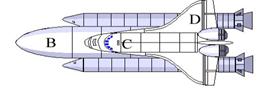
Груз 1 один подвешен на нити к центру невесомого блока 2. Меньшая ступень блока 2 прикреплена нитью к горизонтальной поверхности, а нить, намотанная на большую ступень – навита на закрепленный в центре блок 3. Далее нить с блока 3 наматывается на меньшую ступень катка 4, который катится по шероховатой горизонтальной поверхности, касаясь ее большей ступенью. Центр катка связан с пружиной, другой конец которой закреплен неподвижно. Нити и пружина, которые являются невесомыми, параллельны соответствующим плоскостям. Нити являются нерастяжимыми и абсолютно гибкими. Сопротивление, возникающее в подшипниках блока, пропорционально первой степени угловой скорости блока: ![]() . Качение катка происходит без скольжения, сопротивление качению отсутствует. Центр масс блока расположен на оси его вращения. К грузу приложена возмущающая сила
. Качение катка происходит без скольжения, сопротивление качению отсутствует. Центр масс блока расположен на оси его вращения. К грузу приложена возмущающая сила ![]() . При движении системы нити всегда натянуты. Схема механической системы представлена ниже:
. При движении системы нити всегда натянуты. Схема механической системы представлена ниже:
Исследовать движение механической системы. Определить реакции внешних и внутренних связей, если
![]() – массы груза, блока и катка,
– массы груза, блока и катка,
c – коэффициент жесткости пружины,
![]() – коэффициент демпфирования,
– коэффициент демпфирования,
![]() - радиусы ступеней невесомого блока 2,
- радиусы ступеней невесомого блока 2,
![]() – радиус блока 3,
– радиус блока 3,
![]() – радиусы ступеней катка 4 и радиус инерции относительно оси, проходящей через центр масс,
– радиусы ступеней катка 4 и радиус инерции относительно оси, проходящей через центр масс,
![]() – предельное значение коэффициента сцепления катка 4 и опорной плоскости,
– предельное значение коэффициента сцепления катка 4 и опорной плоскости,
![]() – предельное значение удлинения пружины;
– предельное значение удлинения пружины;
![]() — начальная координата и начальная скорость груза.
— начальная координата и начальная скорость груза.
Исходные данные:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Составление дифференциального уравнения движения механической системы
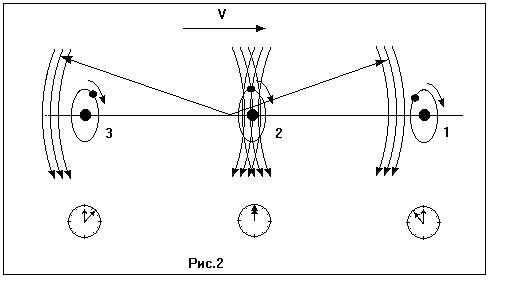
Рассматриваемая механическая система имеет одну степень свободы: это обеспечивается условиями, принятыми при формулировке задания, — тела являются абсолютно твердыми, нити — нерастяжимыми и всегда натянутыми, проскальзывание при движении катка отсутствует. Следовательно, для задания положения системы нужен один параметр. Будем определять положение системы с помощью координаты S, задающей положение центра масс груза (рис.2). Начало отсчета координаты S совместим с положением центра масс груза при равновесии системы. Углы поворота блока ![]() и катка
и катка ![]() отсчитываем по ходу часовой стрелки. Положение центра масс катка
отсчитываем по ходу часовой стрелки. Положение центра масс катка ![]() определяем координатой
определяем координатой
![]() , отсчитываемой от положения центра масс катка при равновесии системы:
, отсчитываемой от положения центра масс катка при равновесии системы:
если ![]() , то
, то ![]() ,
, ![]() ,
, ![]() и
и ![]() и наоборот, причем нулевому значению координаты S соответствуют нулевые значения координат
и наоборот, причем нулевому значению координаты S соответствуют нулевые значения координат ![]() ,
, ![]() ,
, ![]() и
и ![]() .
.
Для составления дифференциального уравнения движения системы используем теорему об изменении кинетической энергии механической системы в дифференциальной форме:
 (1)
(1)
где: T — кинетическая энергия системы, ![]() — сумма мощностей внешних
— сумма мощностей внешних
сил, ![]() — сумма мощностей внутренних сил.
— сумма мощностей внутренних сил.
Пусть в произвольный момент система занимает положение, в котором
S>0, а скорость груза ![]() направлена вдоль опорной плоскости в положительном направлении координаты S.
направлена вдоль опорной плоскости в положительном направлении координаты S.
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, образующих механическую систему.
Груз 1 совершает поступательное движение. Его кинетическая энергия:
![]()
Блок 2 невесом и его кинетическая энергия равна 0.
Блок 3 совершает вращательное движение вокруг неподвижной оси. Его кинетическая энергия:
![]()
где ![]() — момент инерции блока 3 относительно оси вращения,
— момент инерции блока 3 относительно оси вращения, ![]() —
—
модуль угловой скорости.
Каток 4 совершает плоскопараллельное движение, поэтому его кинетическая энергия равна:
![]()
Тогда кинетическая энергия всего механизма имеет вид:
![]() (2)
(2)
Так как механическая система (мс) имеет 1 степень свободы, то величины ![]() легко выражаются через
легко выражаются через ![]() . Связи между этими величинами будут иметь вид:
. Связи между этими величинами будут иметь вид:
 (3)
(3)
Блок 3 – сплошной однородный цилиндр, для катка 4 известен радиус инерции, поэтому моменты инерции этих тел относительно осей, проходящих через их центры масс и перпендикулярных плоскости чертежа, будут вычисляться:
![]()
Подставляя моменты инерции и выражения (3) в формулу (2), получим полную кинетическую энергию системы:
 (4)
(4)
где величина  называется приведенной массой.
называется приведенной массой. ![]() кг
кг
Теперь вычислим правую часть уравнения (1) – сумму мощностей внешних и внутренних сил, при этом учтем, что мощность силы равна скалярному произведению вектора силы на скорость точки приложения силы, а мощность пары сил – скалярному произведению вектора пары на угловую скорость твердого тела, к которому приложена пара:
![]()
Или

Рассматриваемая нами механическая система является неизменяемой, так как входящие в систему тела абсолютно твердые, а нити — абсолютно гибкие и нерастяжимые. Следовательно, скорости их точек относительно друг друга равны нулю и сумма мощностей внутренних сил также будет равна нулю
![]() (6)
(6)
С учетом кинематических соотношений (3) сумму мощностей внешних
сил преобразуем к виду:
 (7)
(7)
Где
 - приведенная сила.
- приведенная сила.
Упругую силу считаем пропорциональной удлинению пружины. Полное удлинение пружины ![]() равно сумме статического
равно сумме статического ![]() и динамического
и динамического ![]() удлинений
удлинений ![]()
Тогда

Приведенная сила в развернутом виде примет вид:
 (8)
(8)
Где  - приведенная жесткость,
- приведенная жесткость,
 - приведенный коэффициент сопротивления.
- приведенный коэффициент сопротивления.
Подставляя выражения (4), (6) и (7) в (1), получаем после сокращения на ![]() дифференциальное уравнение движения системы:
дифференциальное уравнение движения системы:
![]() (9)
(9)
Учтем, что при равновесии системы (возмущающая сила отсутствует) скорость и ускорение груза равны нулю по определению  , а координата груза равна нулю в силу постановки задачи (начало отсчета совпадает с положением равновесия груза 1 S=0). В этом случае уравнение (9) приводится к виду
, а координата груза равна нулю в силу постановки задачи (начало отсчета совпадает с положением равновесия груза 1 S=0). В этом случае уравнение (9) приводится к виду ![]() , и условием равновесия системы будет служить уравнение
, и условием равновесия системы будет служить уравнение
Откуда
 (10)
(10)
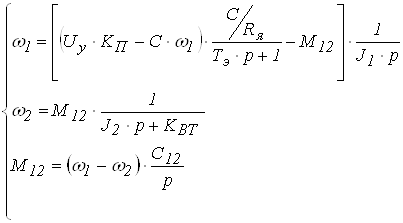
Подставляя (10) в уравнение (9) и учитывая формулу (8) для приведенной силы, получаем дифференциальное уравнение движения системы
![]()
Представим данное уравнение в виде:
![]() (11)
(11)
где введены коэффициенты, имеющие определенный физический смысл:
 - частота собственных колебаний,
- частота собственных колебаний,
 - показатель степени затухания колебаний.
- показатель степени затухания колебаний.
 - относительная амплитуда возмущающей силы.
- относительная амплитуда возмущающей силы.
Начальные условия:
![]() (12)
(12)
Уравнения (11), (12) представляют математическую модель для решения второй задачи динамики.
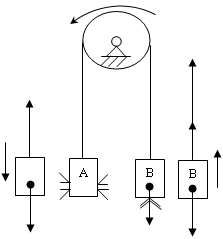
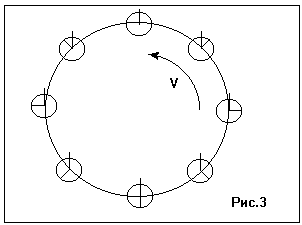
2. Определение реакций внешних и внутренних связейДля решения этой задачи расчленим механизм на отдельные части и построим расчетные схемы для каждого тела (рис.3). На расчетных схемах, помимо ранее введенных сил, показаны реакции (силы натяжения) нитей, связывающих груз и блок 2, блок 2 и горизонтальную поверхность, блоки 2 и 3, блок 3 и каток 4: ![]() .
.
К каждому телу, изображенному на расчетной схеме (рис. 3), применим
две основные теоремы механики материальной системы:
теорему об изменении количества движения
 (13)
(13)
и теорему об изменении кинетического момента относительно оси z, проходящей через центр масс твердого тела
 (14)
(14)
Для каждого тела данные уравнения запишем в проекциях на оси координат соответственно схемам рис. 3:
тело 1:
![]()
тело 2:
тело 3:
тело 4:
Из этих уравнений можно получить формулы для реакций связей:
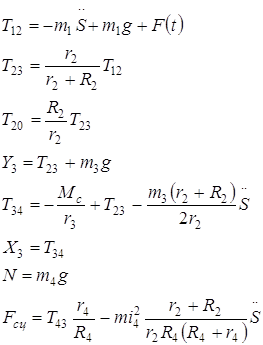 (15)
(15)
Для проверки выражений реакций связей, подставим их в оставшееся неиспользованное уравнение:
![]()
После подстановки и упрощений получаем уравнение, совпадающее с уравнением (11).
3. Определение закона движения системы
Найдем решение дифференциального уравнения движения механической системы (11). Данное дифференциальное уравнение относится к классу линейных неоднородных дифференциальных уравнений с постоянными коэффициентами. Решение таких уравнений можно найти аналитически. Общее решение неоднородного дифференциального уравнения (11) складывается из общего решения однородного уравнения ![]()
![]() (16)
(16)
соответствующего данному неоднородному уравнению, и какого-либо частного решения ![]() уравнения (11), т.е.
уравнения (11), т.е.
![]() (17)
(17)
Решение однородного уравнения (16) ищем в виде функции
![]() (18)
(18)
Подставив (18) в (16), получим:
![]()
Так как мы ищем нетривиальное решение, то ![]() . Следовательно, должно выполняться условие
. Следовательно, должно выполняться условие
![]()
Данное уравнение называется характеристическим уравнением дифференциального уравнения (16). Это уравнение имеет два корня:
![]()
Вид общего решения уравнения (16) зависит от типа корней его характеристического уравнения. Возможны следующие случаи:
1) n<k– корни характеристического уравнения комплексные сопряженные:
![]()
и общее решение однородного уравнения имеет вид
![]() (19)
(19)
Здесь ![]() - постоянные интегрирования.
- постоянные интегрирования.
2) n>k – корни характеристического уравнения действительные и различные
![]()
и общее решение однородного уравнения имеет вид
![]()
3) n=k - корни характеристического уравнения кратные: ![]() и общее решение однородного уравнения имеет вид
и общее решение однородного уравнения имеет вид
![]()
В рассматриваемом случае ![]() ,
, ![]() . Поскольку n<k, то общее решение однородного уравнения (16) имеет вид:
. Поскольку n<k, то общее решение однородного уравнения (16) имеет вид:
![]() или
или ![]() (20)
(20)
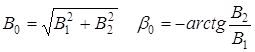
Здесь ![]() , а коэффициенты
, а коэффициенты ![]() связаны между собой соотношениями:
связаны между собой соотношениями:
![]()
Определим частное решение неоднородного дифференциального уравнения (11). Данное решение ищем в виде правой части
![]() (21)
(21)
где коэффициенты ![]() связаны между собой соотношениями
связаны между собой соотношениями
Подставляя (21) в уравнение (11), после несложных преобразований получим
![]()
Приравнивая коэффициенты при функциях sin(pt) и cos(pt) в правой и левой частях последнего равенства, получаем систему алгебраических уравнений для определения постоянных ![]() :
:

Решая данную систему, найдем выражения для коэффициентов:


Таким образом, решение (21) найдено. Складывая (20) и (21), получаем общее решение неоднородного уравнения (11):
![]() (22)
(22)
Константы ![]() и
и ![]() определяются из начальных условий (12). Для этого найдем производную по времени от перемещения груза
определяются из начальных условий (12). Для этого найдем производную по времени от перемещения груза
![]() (23)
(23)
Подчинив (22) и (23) начальным условиям, получим систему уравнений
относительно искомых констант

Решая систему, получим:
 (24)
(24)
Таким образом, закон движения имеет вид:
![]()
Из последней формулы следует, что движение системы представляет собой наложение двух движений:
1) собственного движения (первое слагаемое справа), которое представляет собой затухающие колебания частоты ![]() , так как множитель
, так как множитель ![]() при
при ![]() ;
;
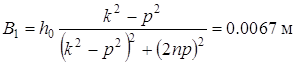
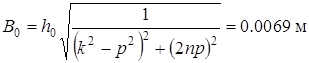
2) вынужденных колебаний постоянной амплитуды ![]() (второе слагаемое справа), происходящих с частотой возмущающей силы
(второе слагаемое справа), происходящих с частотой возмущающей силы ![]() , причем фаза вынужденных колебаний отстает от фазы возмущающей силы на величину
, причем фаза вынужденных колебаний отстает от фазы возмущающей силы на величину ![]()
Поскольку по истечении некоторого промежутка времени собственное движение затухает, то определяющим движением системы являются вынужденные колебания.
4. Результаты расчетовНиже приведен пример документа Mathcad, в котором реализована процедура вычисления закона движения груза, его скорости и ускорения, а также динамических реакций внешних и внутренних связей.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Результаты расчетов:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Математическая модель, описывающая поведение исследуемой механической системы, построена при следующих основных допущениях:
1) каток 4 движется без проскальзывания, т.е. модуль силы сцепления ![]() подчинен следующему ограничению:
подчинен следующему ограничению:
![]()
где ![]() - предельное значение силы сцепления; в нашем случае
- предельное значение силы сцепления; в нашем случае ![]()
2) кинематические связи, наложенные систему, являются голономными (интегрируемыми), поэтому нити при движении системы всегда натянуты, т.е. реакции нитей всегда должны быть положительными.
3) колебания системы являются линейными, то есть предполагается, что удлинение пружины (перемещение центра масс катка 4) не превышает своего предельного значения: ![]()
Анализ результатов расчета (в свете перечисленных требований к поведению механической системы) приводит к логическому выводу:
так как в некоторые моменты времени силы натяжения (реакции) нитей становятся отрицательными, а сила сцепления превышает свое предельное значение, то математическая модель системы не соответствует ее реальному поведению, — нити провисают, тела движутся рывками, а каток – с проскальзыванием.
Данное заключение позволяет сформулировать задачу исследования:
обеспечить соответствие математической модели реальному поведению системы.
Иными словами, необходимо удовлетворить следующим условиям:
1) нити должны быть натянутыми при движении системы;
2) величина силы сцепления должна обеспечивать движение катка без проскальзывания;
3) перемещение центра масс катка не должно превышать величины предельного значения удлинения пружины.
Данные условия представим в математическом виде
![]()
 (25)
(25)
Для определения значений внутренних параметров механической системы - масс тел ![]() и коэффициента жесткости пружины c, - обеспечивающих ее функционирование в соответствие с предложенной математической моделью, выберем в качестве анализируемых величин
и коэффициента жесткости пружины c, - обеспечивающих ее функционирование в соответствие с предложенной математической моделью, выберем в качестве анализируемых величин
1) реакции сил натяжения нитей;
2) силу сцепления катка с опорной плоскостью;
3) перемещения центра масс катка 4;
Исследуем изменение этих функций, в зависимости от масс тел входящих в механическую систему, а также жесткости упругого элемента.
Ограничимся состоянием установившегося движения. В этом случае закон движения груза, его скорость и ускорение имеют вид
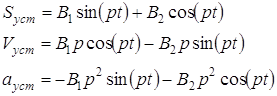
Функции сил натяжений нитей и сцепления катка представим в виде:
 (26)
(26)
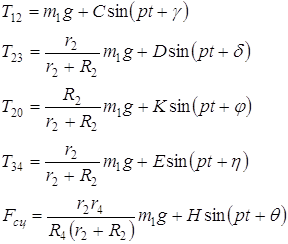
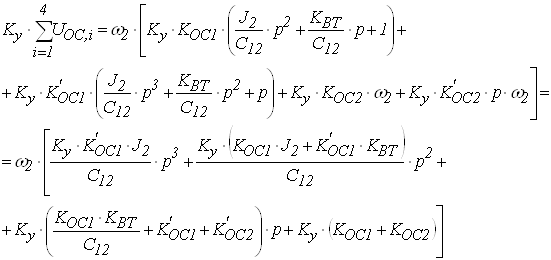
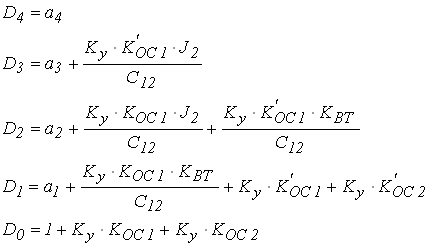
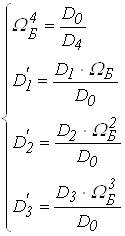
где коэффициенты, входящие в (26) равны:
![]()
![]()
![]()
![]()
![]()


![]()
![]()
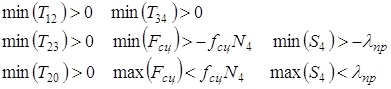
Условия (25), обеспечивающие адекватность движения системы математической модели (11), (12) можно теперь представить в виде
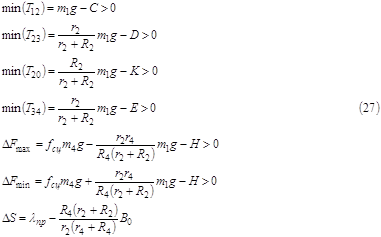
Так как все коэффициенты, входящие в соотношения (27) являются
функциями внутренних параметров механической системы ![]() и с, то
и с, то
вычисление зависимостей ![]() представим в виде процедуры S(M1,M3,M4,W) пакета Mathcad. Выражение для функции ΔS(M1,M3,M4,W), в силу несложности ее преобразования, получим позже.
представим в виде процедуры S(M1,M3,M4,W) пакета Mathcad. Выражение для функции ΔS(M1,M3,M4,W), в силу несложности ее преобразования, получим позже.
В дальнейшем, ограничимся исследованием влияния масс ![]() и
и ![]() . Установим интервалы их изменения. Для этого рассмотрим механическую систему в состоянии резонанса. Если
. Установим интервалы их изменения. Для этого рассмотрим механическую систему в состоянии резонанса. Если ![]() , то
, то
|
|

откуда следует: 1) если ![]() , то
, то ![]() ; 2) если
; 2) если ![]() , то
, то ![]() . Процедура вычислений функций, входящих в (27):
. Процедура вычислений функций, входящих в (27):
Рассмотрим теперь последнее неравенство в условиях (27) – ΔS > 0. Учитывая выражение для амплитуды ![]() представим его в виде
представим его в виде
![]()
где  - предельное значение перемещения груза 1.
- предельное значение перемещения груза 1.
Подставляя вместо коэффициентов k и n их выражения, найдем, из уравнения ΔS = 0, предельные значения массы груза 1
![]()
где 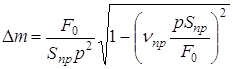
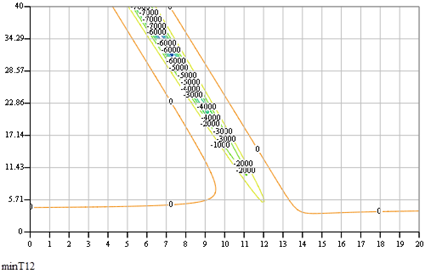
Исследуем теперь зависимости (27). Для этого изобразим их на плоскости ![]() линиями уровня. Отдельно для каждой функции линии уровня будут иметь вид:
линиями уровня. Отдельно для каждой функции линии уровня будут иметь вид:
Для ![]() :
:
Для ![]() :
:
Для ![]() :
:
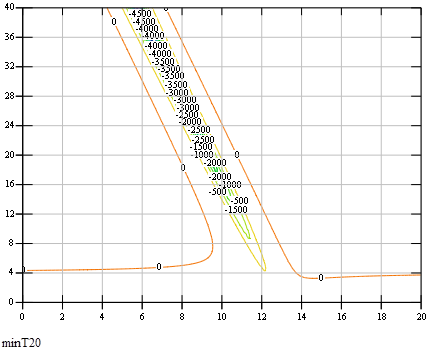
Для ![]() :
:
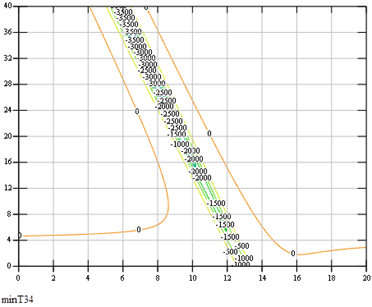
Чтобы определить области допустимых значений для масс груза 1 и катка 4, нарисуем линии уровней всех функций на одном рисунке:
Как видно из рисунка, в дорезонансном режиме нет области значений масс, которые удовлетворяли бы условиям (25).
6. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет механической системы в послерезонансном режиме:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
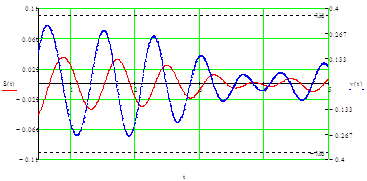
Графики движения и скорости груза 1
Графики сил натяжения нитей:
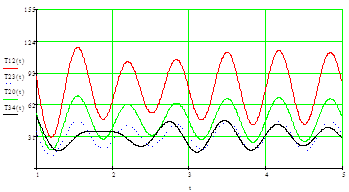
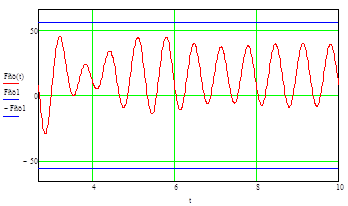
График силы сцепления:
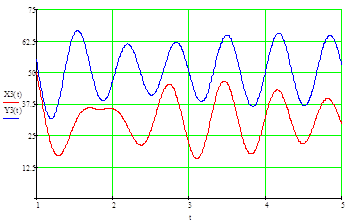
Графики реакций опор блока 3:
Выводы
В результате решения дифференциального уравнения движения системы (11) при начальных условиях (12) определен закон движения системы S=S(t), на основании которого по разработанному алгоритму вычислены значения реакций связей.
Анализ результатов расчета показал, что в некоторые моменты времени натяжения нитей становятся отрицательными, а сила сцепления превышает свое предельное значение, и, следовательно, принятая математическая модель не соответствует поведению механической системы: нити провисают, тела движутся рывками, а каток 4 – с проскальзыванием.
Для устранения этой ситуации были сформулированы критерии, удовлетворение которых обеспечивает адекватность движения системы математической модели, т.е. выполнение условий (25).
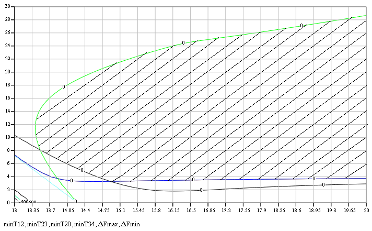
Исследование влияний масс груза 1 и катка 4 на движение системы позволило определить область значений масс для них, внутри которой выполняются указанные условия.
Исследования показали, что такая область существует лишь в послерезонансном режиме.
Результаты расчетов скорректированной механической системы представлены в виде графиков изменения характерных параметров в зависимости от времени.
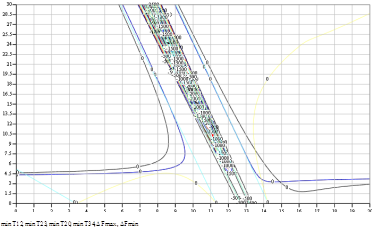
Область допустимых значений для масс груза и катка представлена ниже:
Похожие работы
... и реакции внешних и внутренних связей. Произведен численный анализ полученного решения с использованием ЭВМ. Исходные данные: m = 1 кг r = 0.1 м с = 4000 H/м Часть 1. Применение основных теорем динамики механической системы 1.1 Постановка второй основной задачи динамики системы. Расчетная ...
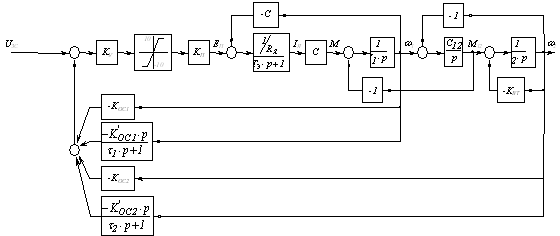
... Для уменьшения токов утечки по поверхностям платы ее необходимо покрыть с двух сторон лаком, например типа К-47. Заключение В данном курсовом проекте разработана система управления скоростью электропривода с двигателем постоянного тока. В качестве модели была выбрана эквивалентная структура двухмассовой системы с упругой связью двигателя и рабочего органа. Настройку системы производили с ...
... следует курсор установит на отметку “Exit” и нажат клавишу <Enter>. 14. Для повторения работы необходимо выполнить последовательно пункты с 4-го по 13-й. §2.3 Текст анимационно-обучающей программы механической системы Program Water_Program; Uses Crt, Graph; Const { Vvod Unit Graphics } FunWeb='c:tpBgi'; Var Gd,Gm,I,X,Y,X1,Y1,XX,YY,Rad,J:Integer; Z,J1,J2,W,V,G:Integer; ...
... полюсов. Самоорганизация эти поля сохраняет. Из таких колебательных систем сами, как мозаика из магнитов, складываются “классические” самоорганизующиеся модели микромира. Не будем утверждать, что здесь изложены единственно правильные варианты решений "принципиально неразрешимых" задач классической физики. Важно было показать, что такие решения есть - вопреки самым авторитетным уверениям всей ...
0 комментариев