Навигация
Разработка анимационно-обучающей программы механической системы
102471
знак
0
таблиц
17
изображений
Содержание
Не рассматривая физико-химическую природу сил, возникающих при отбрасывании от ракеты газов, образованных при сгорании пороха, сделаем такое упрощающее вывод предположение.

Введение
Глава 1. Механические системы и анимационное моделирование.
§ 1.1 Некоторые аспекты создания модели механической системы.
§ 1.1.1 Механические системы. Центр масс.
§ 1.1.2 Количество движения системы тел, закон сохранения количества движения
§ 1.1.3 Движение центра масс механической системы.
§ 1.1.4 Движение тел переменной массы. Уравнение Мещерского. Формула Циалковского.
§ 1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой).
§ 1.3 Анимационное моделирование процесса обучения механических систем.
Глава 2. Анимационно – обучающий метод механической системы.
§ 2.1 Анимация механической системы.
§ 2.1.1 Обучающие программы.
§ 2.1.2 Описание установки.
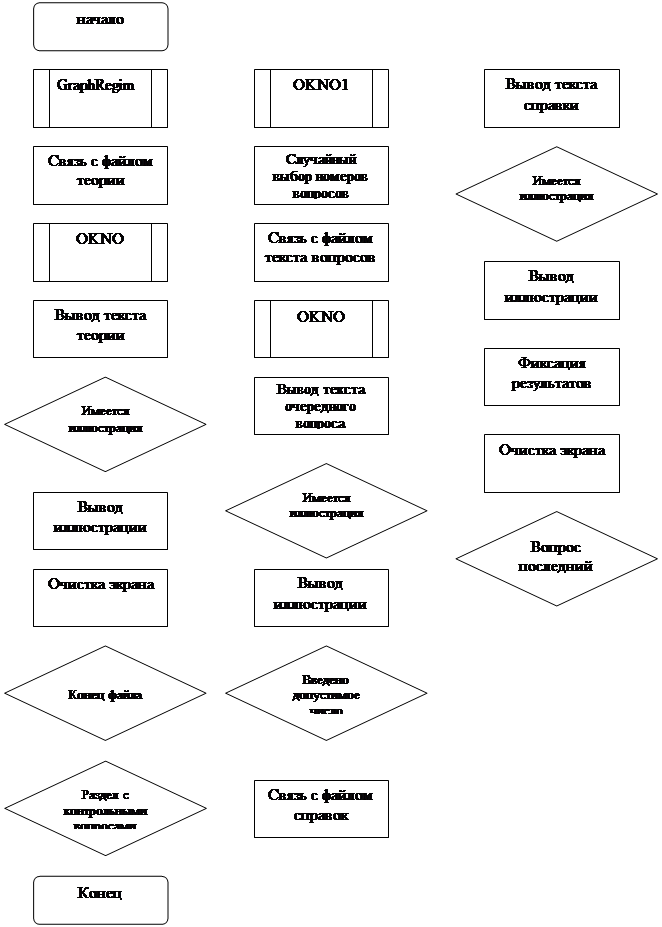
§ 2.1.3 Алгоритмизация анимационно – обучающей механической системы.
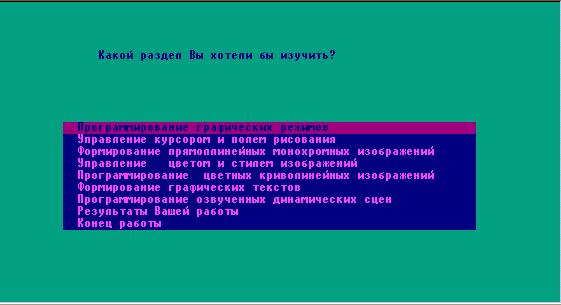
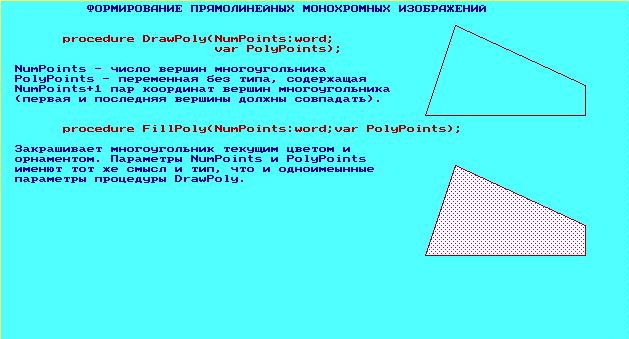
§ 2.2 Инструкция пользования анимационно-обучающей программы “Water Program”
§ 2.3 Текст анимационно – обучающей программы механической системы.
Заключение.
Список использованной литературы.
Введение
При изучения двух тел закон движения одного или двух тел не исчерпывает всех возможных задач о механическом движений с которыми мы сталкиваемся при изучений природы и в технике. Не редко приходиться иметь дело с движением совокупности взаимодействующих между собой тел, или с движением как говорят механической системы. При изучения или обучения таких систем приходиться рассматривать процесс системно. То есть каждую часть этой системы надо представить эту систему в частности и в комплексе учитывая взаимодействие этих систем. Создание физических установок для изучения свойства этих систем является очень сложной задачи. Но с другой стороны с помощью анимационных методов компьютерного моделирования можно создать виртуальной установки свойств механических систем. Такие виртуальные установки при обучения играет не заменимую роль. Так как с помощью этого метода можно полностью не только изучить , но даже визуально представить внутренние движение механической системы. Тем самым можно сказать об актуальности создание таких установок. С другой стороны создание виртуальных установок связанно с созданием концептуальной модели механической системы. Это раз. Второе – алгоритмизации этой модели. Третье – компьютерной реализаций этих алгоритмов. В комплексе решение этих проблем является обязанностью любого информатика.
В принципе создание комплексной модели требует от информатика глубокого знания предложной области. А алгоритмизация выражает способность математическое мышление информатика. В принципе всегда основные анимационные методы заключается – искусственные представление движение в кино, на телевидение или в комплексной графике путем отображения последовательности рисунков или кадров частотой, при которой обеспечивается целостное зрительное восприятие образов. С другой стороны после создания виртуальной анимационной программы установки нам представляет разработки педагогических методов обучения на этой установке. Связи с этим создание анимационной обучающий программы для изучения движения тела с переменной массы является востребованной.
ГЛАВА1.МЕХАНИЧЕСКИЕ СИСТЕМЫ И АНИМАЦИОННЫЕ МОДЕЛИРОВАНИЕ
§ 1.1 Некоторые аспекты создания модели механической системы
§1.1.1 Механические системы. Центр масс
Мы при мы изучении взаимодействия двух тел и часто, рассматривая движение одного тела, заменяли другое, с которым первое взаимодействует, соответствующей силой. Но изучение законов движения одного или двух тел не исчерпывает всех возможных задач о механическом движении, с которыми мы сталкиваемся при изучении природы или в технике. Нередко приходится иметь дело с движением совокупности взаимодействующих между собой тел, или с движением, как говорят, механической системы . Пример механических систем : любая машина, тепловоз с вагонами, Солнце и планеты, ракетный поезд и т. п., а также любое тело, если в данной задаче его приходится рассматривать как совокупность частиц.
Если движение таково, что размеры и форма отдельных тел, образующих систему, не играют роли, то рассматривается задача о движении системы материальных точек.
Силы, действующие между телами системы, называются внутренними для данной системы силами.
Силы, действующие на тела системы со стороны тел, не входящих в данную систему, называются внешними силами.
Одна и та же сила в зависимости от постановки задачи может быть внутренней или внешней. Например, силы взаимного притяжения планет и Солнца - внутренние силы, если мы рассматриваем солнечную систему как целое, и внешние по отношению к каждой отдельно взятой планете, когда, скажем , мы решаем задачу о движении Земли и Луны, о приливных явлениях на поверхности Земли и т. п.
Под воздействием сил каждая из материальных точек системы, вообще говоря, как-то изменяет состояние своего движения, перемещаясь относительно других точек. Чтобы исследовать движение системы в целом, надо, очевидно, исследовать движение каждой ее точки. Мы могли бы воспользоваться для этого законами Ньютона, составить уравнения движения каждой точки системы и решить их. Но такой путь решения задачи о движении системы часто оказывается весьма сложным либо вследствие того, что трудно определить внутренние силы в виде известной функции (например, при быстро протекающих взаимодействиях тел типа удара), либо потому, что исследуемая система состоит из очень большого числа материальных точек (например, при исследовании движения некоторого объема жидкости). Однако в ряде случаев, как увидим дальше, оказывается возможным обойти эти затруднения.
Введем понятие центра масс системы тел. В элементарной физике вводится понятие центра тяжести как точки приложения равнодействующей сил тяжести, действующих на элементы тел. Введем более общее понятие, не зависящее от силы тяжести центр масс системы. Центром масс двух материальных точек называется точка, делящая расстояние между ними в отношении, обратно пропорциональном их массам (рис. 1.). усть имеем две материальные точки массой m1 и m2, координаты которых в неподвижной системе отсчета соответственно x1, y1, z1 и x2, y2, z2. По известному правилу аналитической геометрии координаты точки x, y, z, делящей отрезок в заданном отношении ![]()
Связаны с координатами концов отрезка следующим соотношением.
Решая эти равенства относительно x, y, z, получим:
![]()
![]()
Центром масс трех материальных точек называется точка, которая делит расстояние между центром масс двух из них и третьей точкой в отношении, обратно пропорциональном сумме масс двух первых и массе третьей из них.
Легко получить координаты центра масс трех материальных точек, подобно тому как это сделано выше для двух точек:
m2=2
m1=1
Ä
m3=12
Рис.1. К определению центра масс материальных точек:
![]() -центр масс m1 и m2;
-центр масс m1 и m2;
![]() - центр масс m1, m2 и m3;
- центр масс m1, m2 и m3;
![]()
![]()
![]()
Прибавляя к системе четвертую, пятую и т. д. точки, получим, что координаты центра масс системы n материальных точек:



§ 1.1.2 Количество движения системы тел. Закон сохранения количества движения
Рассмотрим действие друг на друга двух изолированных тел не взаимодействующих с другими телами. Будем считать силы во все время взаимодействия постоянными. В соответствии со вторым законом динамики изменение количества движения первого тела:
![]()
где ![]() - интервал времени взаимодействия .
- интервал времени взаимодействия .
Изменение количества движения второго тела:
![]()
где ![]() -сила, действующая со стороны первого тела на второе.
-сила, действующая со стороны первого тела на второе.
Согласно третьему закону Ньютона
![]()
и, кроме того, очевидно,
![]()
Следовательно,
![]()
или
![]()
Независимо от природы сил взаимодействия и длительности их действия общее количество движения двух изолированных тел остается постоянным.
Полученный результат может быть распространен на любое число взаимодействующих тел и на силы, меняющиеся со временем. Для этого интервал времени ![]() в течение которого происходит взаимодействие тел, разобьем на столь малые промежутки
в течение которого происходит взаимодействие тел, разобьем на столь малые промежутки ![]() в течение каждого из которых силу можно с заданной степенью точности считать постоянной. В течение каждого промежутка времени будет выполняться соотношение (1.8). Следовательно, оно будет справедливо и для всего интервала времени
в течение каждого из которых силу можно с заданной степенью точности считать постоянной. В течение каждого промежутка времени будет выполняться соотношение (1.8). Следовательно, оно будет справедливо и для всего интервала времени ![]()
Для обобщения вывода на ![]() взаимодействующих тел введем понятие замкнутой системы.
взаимодействующих тел введем понятие замкнутой системы.
Замкнутой называется система тел, для которой результирующая внешних сил равна нулю.
Пусть ![]() материальных точек массами
материальных точек массами ![]() образуют замкнутую систему. Изменение количества движения каждой из этих точек в результате взаимодействия ее со всеми остальными точками системы соответственно:
образуют замкнутую систему. Изменение количества движения каждой из этих точек в результате взаимодействия ее со всеми остальными точками системы соответственно:
![]()
Обозначим внутренние силы, действующие на точку массой ![]() со стороны других точек , через
со стороны других точек , через ![]() на точку массой
на точку массой ![]() и т. д. (Первый индекс обозначает точку, на которую действует сила; второй индекс указывает точку, ос стороны которой действует сила. )
и т. д. (Первый индекс обозначает точку, на которую действует сила; второй индекс указывает точку, ос стороны которой действует сила. )
Запишем в принятых обозначениях второй закон динамики для каждой точки в отдельности:
![]()
![]()
![]()
![]()
![]()
Число уравнений равно числу ![]() тел системы. Чтобы найти общее изменение количества движения системы, нужно подсчитать геометрическую сумму изменений количества движения всех точек системы. Просуммировав равенства (1.9), мы получим в левой части полный вектор изменения количества движения системы за время,
тел системы. Чтобы найти общее изменение количества движения системы, нужно подсчитать геометрическую сумму изменений количества движения всех точек системы. Просуммировав равенства (1.9), мы получим в левой части полный вектор изменения количества движения системы за время, ![]() а в правой части – элементарный импульс результирующей всех сил, действующих в системе. Но так как система замкнута, то результирующая сил равна нулю. В самом деле, по третьему закону динамики каждой силе
а в правой части – элементарный импульс результирующей всех сил, действующих в системе. Но так как система замкнута, то результирующая сил равна нулю. В самом деле, по третьему закону динамики каждой силе ![]() в равенствах (1.9) соответствует сила
в равенствах (1.9) соответствует сила ![]() причем
причем
![]() т. е.
т. е. ![]() и т. д.,
и т. д.,
и результирующая этих сил равна нулю. Следовательно, во всей замкнутой системе изменение количества движения равно нулю:
![]()
или
![]() =const. (1.11)
=const. (1.11)
полное количество движения замкнутой системы – величина постоянная во все время движения (закон сохранения количества движения).
Закон сохранения количества движения – один из фундаментальных законов физики, справедливый как для систем макроскопических тел, так и для систем, образованных микроскопическими телами: молекулами, атомами и т. п.
Если на точки системы действуют внешние силы, то количество движения, которым обладает система, изменяется.
Напишем уравнения (1.9), включив в них результирующие внешних сил ![]() действующих соответственно на первую, вторую и т. д. До
действующих соответственно на первую, вторую и т. д. До ![]() -й точки:
-й точки:
![]()
![]()
![]()
![]()
![]()
Сложив левые и правые части уравнений, мы получим: слева – полный вектор изменения количества движения системы; справа – импульс результирующей внешних сил:
![]()
или, обозначая результирующую внешних сил ![]() :
:
![]()
т. е.
изменение полного количества движения системы тел равно импульсу результирующей внешних сил.
Равенство (1.13) может быть записано в другом виде:
![]()
т. е.
производная по времени от общего количества движения системы точек равна результирующей внешних сил, действующих на точки системы.
![]()
Проецируя векторы количества движения системы и внешних сил на три взаимно перпендикулярные оси, вместо векторного равенства (6.14) получим три скалярных уравнения вида:
![]()
![]()
![]()
Если вдоль какой-либо оси, скажем ![]() , составляющая результирующей внешних сил равна нулю, то количество движения вдоль этой оси не изменяется, т. е., будучи вообще незамкнутой, в направлении
, составляющая результирующей внешних сил равна нулю, то количество движения вдоль этой оси не изменяется, т. е., будучи вообще незамкнутой, в направлении ![]() система может рассматриваться как замкнутая.
система может рассматриваться как замкнутая.
Мы рассмотрели передачу механического движения от одних тел к другим без перехода его в другие формы движения материи.
Величина «mv оказывается здесь мерой просто перенесенного, т. е. продолжающегося, движения… ».
Применение закона изменения количества движения к задаче о движении системы тел позволяет исключить из рассмотрения все внутренние силы, что упрощает теоретическое исследования и решения практических задач.
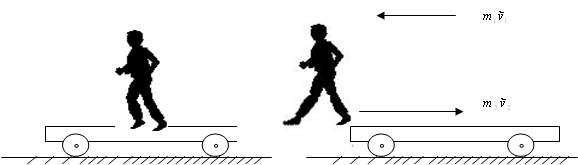
1.Пусть на покоящейся тележке неподвижно стоит человек (рис. 2. а). Количество движения системы человек – тележка равно нулю. Замкнута ли эта система? На нее действуют внешние силы – сила тяжести и сила трения между колесами тележки и полом. Вообще говоря, система не замкнута. Однако, поставив тележку на рельсы и соответствующим образом обработав поверхность рельсов и колес, т. е. значительно уменьшив трение между ними, можно силой трения пренебречь.
Сила тяжести, направления вертикально вниз, уравновешивается реакцией деформированных рельсов, и результирующая этих сил не может сообщить системе горизонтального ускорения, т. е. не может изменить скорость, а следовательно, и количество движения системы. Таким образом, мы можем с известной степенью приближения считать данную систему замкнутой.
Положим теперь, что человек сходит с тележки влево(рис. 2. б), имея скорость ![]() . Чтобы приобрести эту скорость , человек должен, сократив свои мышцы, подействовать ступнями ног на площадку тележки и деформировать ее. Сила, действующая со стороны деформированной площадки на ступни человека, сообщает телу человека ускорение влево, а сила, действующая со стороны деформированных ступней человека (в соответствии с третьим законом динамики), сообщает тележке ускорение вправо. В результате, когда взаимодействие прекратится (человек сойдет с тележки), тележка приобретает некоторую скорость
. Чтобы приобрести эту скорость , человек должен, сократив свои мышцы, подействовать ступнями ног на площадку тележки и деформировать ее. Сила, действующая со стороны деформированной площадки на ступни человека, сообщает телу человека ускорение влево, а сила, действующая со стороны деформированных ступней человека (в соответствии с третьим законом динамики), сообщает тележке ускорение вправо. В результате, когда взаимодействие прекратится (человек сойдет с тележки), тележка приобретает некоторую скорость ![]() .
.
Для нахождения скоростей ![]() и
и ![]() с помощью основных законов динамики надо было бы знать, как меняются силы взаимодействия человека и тележки со временем и где приложены эти силы. Закон сохранения количества движения позволяет сразу найти отношение скоростей человека и тележки, а также указать их взаимную направленность, если известны значения масс человека
с помощью основных законов динамики надо было бы знать, как меняются силы взаимодействия человека и тележки со временем и где приложены эти силы. Закон сохранения количества движения позволяет сразу найти отношение скоростей человека и тележки, а также указать их взаимную направленность, если известны значения масс человека ![]() и тележки
и тележки ![]() .
.
Пока человек неподвижно стоит на тележке, общее количество движения системы остается равным нулю:
![]()
Отсюда
![]()
или
![]()
Скорости, приобретенные человеком и тележкой, обратно пропорциональны их массам. Знак «минус» указывает на их противоположную направленность.
2.Если человек, двигаясь со скоростью ![]() , вбегает на неподвижно стоящую тележку и останавливается на ней, то тележка приходит в движение, так что общее количество движения ее и человека оказывается равным количеству движения, которым обладал раньше человек один:
, вбегает на неподвижно стоящую тележку и останавливается на ней, то тележка приходит в движение, так что общее количество движения ее и человека оказывается равным количеству движения, которым обладал раньше человек один:
![]()
3.Человек, движущийся со скоростью ![]() ,вбегает на тележку, перемещающуюся ему навстречу со скоростью
,вбегает на тележку, перемещающуюся ему навстречу со скоростью ![]() , и останавливается на ней. Далее система человек – тележка движется с общей скоростью
, и останавливается на ней. Далее система человек – тележка движется с общей скоростью ![]() Общее количество движения человека и тележки равно сумме количеств движения, которыми они обладали каждый в отдельности:
Общее количество движения человека и тележки равно сумме количеств движения, которыми они обладали каждый в отдельности:
![]()
4. Использовав то обстоятельство ,что тележка может перемещаться только вдоль рельсов, можно продемонстрировать векторный характер изменения количества движения. Если человек входит и останавливается на неподвижной до этого тележке один раз вдоль направления возможного ее движения, второй раз – под углом 45є, а третий – под углом 90є к этому направлению, то во втором случае скорость, приобретенная тележкой, примерно в полтора раза меньше, чем в первом ![]() , а в третьем случае тележка неподвижна
, а в третьем случае тележка неподвижна ![]() .
.
§1.1.3 Движение центра масс механической системы
Покажем, что поступательное движение механической системы как целого можно характеризовать движением одной точки – центра масс системы, считая, что в ней сосредоточена масса всех тел, входящих в систему.
Перепишем равенства (6.4) в виде
![]()
![]()
![]()
продифференцируем по времени:
![]()
![]()
![]()
В равенствах (6.17) слева стоит произведение суммарной массы тел ![]() образующих систему, и компонент
образующих систему, и компонент ![]() представляющих собой слагающие скорости движения центра масс системы по осям координат, а справа – компоненты вектора полного количества движения тел системы:
представляющих собой слагающие скорости движения центра масс системы по осям координат, а справа – компоненты вектора полного количества движения тел системы:
![]()
Полное количество движения механической системы равно количеству движения материальной точки массой, равной массе тел системы и движущейся, как движется ее центр масс.
Продифференцируем равенство (1.18) по времени и сравним с выражением (1.14). В равенстве (1.18) после дифференцирования справа, а в равенстве (1.14) слева стоит одна и та же величина – производная от вектора полного количества движения тел системы. Следовательно,
![]()
![]()
где ![]() - количество движения центра масс системы,
- количество движения центра масс системы, ![]() - вектор результирующей внешних сил, действующих на тела системы.
- вектор результирующей внешних сил, действующих на тела системы.
Центр масс механической системы движется так же, как двигалась бы материальная точка, в которой сосредоточена масса всех тел системы, под действием результирующей внешних сил, приложенных к телам, образующим систему.
Если механическая система замкнута, т. е. ![]() то
то
![]() =const.
=const.
Центр масс замкнутой механической системы находится в покое или движется равномерно и прямолинейно.
Закон движения центра масс механической системы не дает полной картины движения отдельных ее тел, но позволяет установить некоторые важные особенности движения системы в целом.
Рассмотрим, например, движение солнечной системы. С большой степенью точности ее можно считать замкнутой, пренебрегая взаимодействием с другими космическими телами. Следовательно, центр масс солнечной системы можно считать движущимся прямолинейно и равномерно.
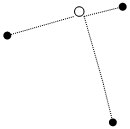
Рассмотрим твердое тело, находящееся в покое. Положим, на него одновременно подействовали двумя силами, равными по величине, но противоположно направленными и приложенными в двух точках A и B, не совпадающих с центром масс (рис. 3). Такая система сил называется парой сил. Каков характер движения тела?
Рис.3. Тело под действием сил поворачивается вокруг центра масс.
Результирующая приложенных к телу внешних сил равна нулю. Следовательно , центр масс тела должен остаться в покое. Тело, одна точка которого неподвижна, может, очевидно, только вращаться вокруг этой точки. И следовательно, тело под действием приложенной пары сил будет поворачиваться вокруг центра масс C. Иногда, руководствуясь только интуицией, приходят к ошибочному заключению, что в описанном случае тело должно вращаться вокруг точки О, расположенной между точками приложения пары сил.
§ 1.1.4 Движеие тел переменной массы. Уравнение мещерского. Формула циолковского
В природе и современной технике мы нередко сталкиваемся с движением тел, масса которых меняется со временем. Масса земли возрастет вследствие падения на нее метеоритов, масса метеорита при полете в атмосфере уменьшается в результате отрыва или сгорания его частиц, масса дрейфующей льдины возрастет при намерзании и убывает при таянии и т. д. Движение якоря с якорной цепью, когда все большее число звеньев цепи сходит с лебедки, -пример движения тела переменной массы. Ракеты все систем, реактивные самолеты, реактивные снаряды и мины также являются телами, масса которых изменяется во время движения.
Общие законы динамики тел с переменной массой были открыты и исследованы И. В. Мещерским и К. Э. Циолковским. Циолковским были разработаны фундаментальные проблемы реактивной техники, которые в наши дни служат основной для штурма человеком межпланетных пространств.
Для вывода основного уравнения движения тела переменной массы рассмотрим конкретный случай движения простейшей ракеты (рис. 4).
Мы будем рассматривать ракету достаточно малое тело, положение центра тяжести которого не меняется по мере сгорания пороха. В этом случае мы можем считать ракету материальной точкой переменной массы, совпадающей с центром тяжести ракеты.
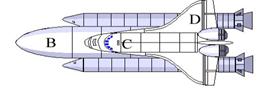 |
Не рассматривая физико-химическую природу сил, возникающих при отбрасывании от ракеты газов, образованных при сгорании пороха, сделаем такое упрощающее вывод предположение.
Рис.4. Схема порохового снаряда: А-вырывается; В - граната с взрывателем; С – пороховая ракетная камера; D - стабилизатор.
Будем считать , что отбрасываемая от ракеты частица газа dM взаимодействует с ракетой M только в момент их непосредственного контакта. Как только частица dM приобретает скорость относительно точки M, ее воздействие на нее прекращается. Предположим далее, что изменение массы ракеты M происходит непрерывно, без скачков. (Это значит, что мы не рассматриваем многоступенчатые ракеты, масса которых меняется скачкообразно. ) Это предположение позволяет считать, что существует производная от массы по времени.
Пусть в момент t масса ракеты M, а ее скорость относительно неподвижной системы координат ![]() (рис. 5). Положим, за время dt от ракеты отделилась частица массы (-dM) со скоростью (относительно той же неподвижной системы координат ), равной
(рис. 5). Положим, за время dt от ракеты отделилась частица массы (-dM) со скоростью (относительно той же неподвижной системы координат ), равной ![]() .
.
Знак «минус» перед приращением массы указывает на то, что приращение это отрицательное, масса ракеты убывает.
Положим, равнодействующая внешних сил, действующих на ракету (силы тяжести и сопротивления среды), F. Как сказано выше, в момент отделения частицы массы (-dM) между ней и ракетой действует неизвестная нам реактивная сила ![]() . Сила
. Сила ![]() для системы ракета – частица является внутренней. Чтобы исключить
для системы ракета – частица является внутренней. Чтобы исключить
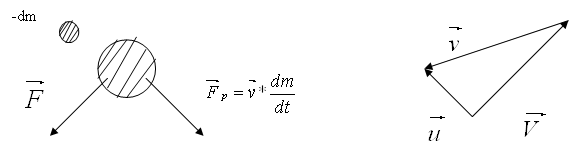
Рис.5.К выводу уравнения движения тела переменной массы.
ее из смотрения, вспользуеамя законом изменения количества движения. Количество движения системы ракета – частица а момент t, т. е. перед отделением частицы:
![]()
Количество движения системы в момент ![]() (после отделения частицы) складывается из количества движения массы
(после отделения частицы) складывается из количества движения массы ![]() , получившей скорость
, получившей скорость ![]() , и количества движения массы частицы – dM, летящей со скоростью
, и количества движения массы частицы – dM, летящей со скоростью ![]() :
:
![]()
Изменение количества движения системы за время dt:
![]()
(мы отбросили член второго порядка малости ![]() ). Величина
). Величина ![]() должна
должна ![]() быть приравнена импульсу равнодействующей внешних сил:
быть приравнена импульсу равнодействующей внешних сил:
![]()
Отсюда, перегруппировав члены и разделив на dt, получим основное уравнение движения точки переменной массы:
![]()
Это уравнение иначе называют уравнением Мещерского. Для ракеты ![]()
![]() , так как при полете масса ее убывает. Если масса тела во время движения увеличивается, то
, так как при полете масса ее убывает. Если масса тела во время движения увеличивается, то ![]() . При
. При ![]() уравнение (1.22) переходит в уравнение второго закона Ньютона для случая постоянной массы. Величина
уравнение (1.22) переходит в уравнение второго закона Ньютона для случая постоянной массы. Величина ![]() есть скорость выбрасываемых ракетой частиц относительно системы координат, движущейся с ракетой. Эту скорость называют обычно просто относительной скоростью V. Тогда равенство (1.22) запишется в виде
есть скорость выбрасываемых ракетой частиц относительно системы координат, движущейся с ракетой. Эту скорость называют обычно просто относительной скоростью V. Тогда равенство (1.22) запишется в виде
![]()
Второй член правой части равенства (1.23) представляет собой реактивную силу, действующую на массу M со стороны вылетевшей частицы dM.
Для любого момента времени произведение массы тела на его ускорение равно векторной сумме равнодействующей приложенных к телу внешних сил и реактивной силы. При движении ракеты вблизи Земли равнодействующая внешних сил представляет собой сумму силы тяжести и силы сопротивления воздуха. Ускорение ракеты зависит еще и от реактивной силы, изменяя величину и направление которой можно управлять полетом ракеты.
Если относительная скорость отбрасываемых частиц равна нулю: ![]() ,то из формулы(1.22) следует:
,то из формулы(1.22) следует:
![]()
т. е. если относительная скорость отбрасываемых частиц равна нулю, то уравнение движения точки переменной массы имеет формально тот же вид, что и для точки постоянной массы, но в этом случае масса M- функция времени t.
Важный вклад в механику тел переменной массы применительно к конкретным задачам реактивной техники внесен знаменитым русским ученым Константином Эдуардовичем Циолковским. В 1903 г. была издана его работа «Исследование мировых пространств реактивными приборами», в которой К. Э. Циолковский исследовал ряд случаев прямолинейных движений ракет. К. Э. Циолковским обоснована и доказана возможность практического использования реактивного движения. Им найдены условия, при которых можно получить скорости, достаточные для осуществления космического полета. Полученная им формула, связывающая скорость ракеты с ее начальной массой, до сих пор используется для предварительных расчетов. В работах 1911-1914 гг. он изучил вопрос о величине запасов топлива, необходимых для преодоления сил тяготения Земли, и предложил высококалорийное топливо, позволяющее получить большие скорости истечения газовых струй. К. Э. Циолковского по праву считают изобретателем жидкостных ракет дальнего действия и основоположником теории межпланетных полетов.
Ему принадлежит идея разработки теории так называемых многоступенчатых ракет, когда на некоторых интервалах времени масса ракеты меняется непрерывно, а в некоторые моменты – скачком. Им проведены большие исследования по оценке сил сопротивления при движении тел переменной массы. К. Э. Циолковским поставлен целый ряд оригинальных проблем, имеющих решающее значение для развития реактивной техники.
Для того чтобы выяснить основные факторы, создающие возможность реактивного движения с большими скоростями, рассмотрим движение точки переменной массы безвоздушном пространстве (отсутствует сопротивление движению тела), без действия внешних сил (силы тяготения) . предположим, что скорость истечения частиц направлена прямо противоположно вектору скорости тела ![]() . Эти условия соответствуют так называемой первой задаче Циолковского. В результате получаем формулу Циолковского и следствие из нее. Найдем при сделанных предположениях скорость движения тела (точки) и закон ее движения.
. Эти условия соответствуют так называемой первой задаче Циолковского. В результате получаем формулу Циолковского и следствие из нее. Найдем при сделанных предположениях скорость движения тела (точки) и закон ее движения.
При сформулированных условиях уравнение движения приобретает вид:
![]()
или
![]()
Положим, ![]() , где
, где ![]() - функция, определяющая закон изменения массы. Очевидно, так как начальная масса
- функция, определяющая закон изменения массы. Очевидно, так как начальная масса ![]() , то функция
, то функция ![]() при
при ![]() должна быть
должна быть ![]() . Подставив в (1.26) значение M и проинтегрировав, получим:
. Подставив в (1.26) значение M и проинтегрировав, получим:
![]()
Для определения постоянной С учетом, что при ![]() , тогда
, тогда ![]()
и
![]()
Эта формула носит название формулы Циолковского. Из формулы следует, что скорость, приобретенная точкой переменной массы, зависит от относительной скорости V и отношения начальной массы к остающейся к концу процесса горения. Если масса точки в конце процесса горения ![]() , отброшенная масса (масса топлива) – m, то при нулевой начальной скорости (
, отброшенная масса (масса топлива) – m, то при нулевой начальной скорости (![]() ) получаем для расчета скорости
) получаем для расчета скорости ![]() в конце процесса горения выражения:
в конце процесса горения выражения: 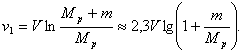
Отношение ![]() называют число Циолковского. Для современных ракет можно положить
называют число Циолковского. Для современных ракет можно положить ![]() . Тогда при числе Циолковского Z=0,250; 9,000; 32,333; 999,000 получим соответственно скорости
. Тогда при числе Циолковского Z=0,250; 9,000; 32,333; 999,000 получим соответственно скорости ![]() .
.
Из формулы Циолковского (1.27) следует , что:
1) Скорость точки переменной массы в конце активного участка (в конце процесса отбрасывания частиц) тем больше, чем больше скорость отбрасывания частиц;
2) Скорость в конце активного участка тем больше, чем больше число Циолковского;
3) Скорость точки переменной массы в конце активного участка не зависит от закона изменения массы (режима горения). Заданному числу Циолковского соответствует определенная скорость точки в конце процесса горения не зависимо от того, быстро или медленно шло горения. Это следствие является проявлением закона сохранения количества движения;
4) Для получения возможно больших скоростей точки переменной массы в конце активного участка выгоднее идти по пути увеличения относительной скорости отбрасывания частиц, чем по пути увеличения запасов топлива.
§1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой)
Имеется много случаев, когда масса тела изменяется в процессе движения за счет непрерывного отделения или присоединения вещества (ракета, реактивный самолет, платформа, нагружаемая на ходу, и др.).
Наша задача: найти уравнение движения такого тела.
Рассмотрим решение этого вопроса для материальной точки, называя ее для краткости телом. Пусть в некоторой момент времени ![]() масса движущего тела A равна m, а присоединяемая (или отделяемая) масса имеет скорость u относительно данного тела.
масса движущего тела A равна m, а присоединяемая (или отделяемая) масса имеет скорость u относительно данного тела.
Введем вспомогательную инерциальную K-систему отсчета, скорость которой такова же, как и скорость тела A в данный момент ![]() . Это значит, что а момент
. Это значит, что а момент ![]() тело A покоится в K- системе.
тело A покоится в K- системе.
Пусть далее за промежуток времени от ![]() до
до ![]() тело A приобретает в K-системе импульс
тело A приобретает в K-системе импульс ![]() . Этот импульс тело A получит, во-первых, вследствие присоединения (отделения) массы
. Этот импульс тело A получит, во-первых, вследствие присоединения (отделения) массы ![]() , которая приносит (уносит) импульс
, которая приносит (уносит) импульс ![]() , и, во-вторых, вследствие действия силы F со стороны окружающих тел или силового поля. Таким образом, можно записать , что
, и, во-вторых, вследствие действия силы F со стороны окружающих тел или силового поля. Таким образом, можно записать , что
![]() ,
,
где знак плюс соответствует присоединению массы, а знак минус – отделению. Оба эти случая можно объединить, представив ![]() в виде приращения
в виде приращения ![]() массы тела A (действительно, в случае присоединения массы
массы тела A (действительно, в случае присоединения массы ![]() , а в случае отделения
, а в случае отделения ![]() ). Тогда предыдущее уравнение примет вид
). Тогда предыдущее уравнение примет вид
![]() .
.
Поделив это выражение на ![]() , получим
, получим
![]()
где ![]() - скорость присоединяемого (или отделяемого) вещества относительно рассматриваемого тела.
- скорость присоединяемого (или отделяемого) вещества относительно рассматриваемого тела.
Это уравнение является основным уравнением динамики материальной точки с переменной массой. Его называют уравнением Мещерского. Будучи полученным в одной инерциальной системе отсчета, это уравнение в силу принципа относительности справедливо и в любой другой инерциальной системе. Заметим , что если система отсчета неинерциальная, то под силой F следует понимать результирующую как сил взаимодействия данного тела с окружающими телами, так и сил инерции.
Последний член уравнения (1.26) носит название реактивной силы: ![]() . Эта сила возникает в результате действия на данное тело присоединяемой (или отделяемой) массы. Если масса присоединяется, то
. Эта сила возникает в результате действия на данное тело присоединяемой (или отделяемой) массы. Если масса присоединяется, то ![]() и вектор R совпадает по направлению с вектором u; если же масса отделяется, то
и вектор R совпадает по направлению с вектором u; если же масса отделяется, то ![]() и вектор R противоположен вектору u.
и вектор R противоположен вектору u.
Уравнение Мещерского по своей форме совпадает с основным уравнением динамики материальной точки постоянной массы: слева – произведение массы тела на ускорение, справа – действующие на него силы, включая реактивную силу. Однако в случае переменной массы нельзя внести массу ![]() под знак дифференцирования и представить левую часть уравнения как производную по времени от импульса, ибо
под знак дифференцирования и представить левую часть уравнения как производную по времени от импульса, ибо ![]() ,
,
Обратим внимание на два частных случая.
Похожие работы
... для обучения физике и математике, в силу их отсутствия на рынке. Исходя из вышеизложенных соображений, я считаю, что тема моей дипломной работы «Разработка электронного учебника по математике для студентов I курса отделения информатика-иностранный язык» является актуальной в силу того, что потребность в таком электронном учебнике несомненно есть, а самих учебников по данной теме либо совсем нет, ...
... работе в графическом режиме предназначается для обучения студентов младших курсов Санкт-Петербургской государственной Академии аэрокосмического приборостроения навыкам программирования, а именно работе в графическом режиме языка Turbo-Pascal . Для работы с настоящей программой необходимо знание стандарта языка, интегрированной среды и элементарным навыкам работы с персональным компьютером . ...
... тему, вопрос. Все, происходящее по этой программе должно соответствовать выбранной тематике. 3. Организация тематического мероприятия В основе тематической анимационной программы обязательно должен лежать сценарий, т.е. подробная литературная разработка содержания тематического вечера, в которой в строгой последовательности излагаются отдельные элементы действия, раскрывается тема, ...
... плана и состав слушателей, происходит определение стратегии курса, разрабатывается сценарий и интерактивное взаимодействие программы с пользователями. Разрабатываемый электронный справочник предназначен для самостоятельной работы студентов младших курсов по изучению Visual Basic в рамках университетского курса. Его создание имеет своей целью предоставить студентам, изучающим Visual Basic весь ...
0 комментариев