Навигация
Исследование влияния нелинейности на характеристики двигателя
47864
знака
14
таблиц
49
изображений
Постановка задачи
Целью данной курсовой работы является:
- построение математической модели ДД;
- построение математической модели РУ;
- исследование влияния нелинейности на характеристики двигателя, сравнительный анализ с ранее полученными результатами;
- разработка схемы управления шаговым двигателем:
- втягивание штока;
- выдвижение штока;
- переключение между режимами;
- разработка схемы формирования управляющего сигнала.
Введение
За подачу топлива в ДД отвечает ТНВД, который управляется с помощью РУ. Такой способ управления не является оптимальным с точки зрения экономии топлива. В других развитых странах подача топлива осуществляется при помощи электронного впрыска топлива непосредственно в цилиндр. Так как в нашей стране все ДД оснащены ТНВД, переход на такой способ подачи топлива является экономически не выгодным. Поэтому для повышения производительности ДД, увеличения экономии расхода топлива принято решение вместо РУ использовать гидрорегулятор, управляемый при помощи системы управления (СУ), построенной на основе МК.
На начальном этапе требуется получиться характеристики РУ, которые мы будем использовать в качестве эталонных, при проектировании СУ. Для получения характеристик требуется построить математические модели и промоделировать их в пакете Simulink.
В качестве альтернативного РУ, будем использовать шаговый двигатель с сервоприводом, для которого требуется разработать схемы управления и подключения, программное обеспечение.\
,1 Общие сведения построения математической модели
Математическое описание тягово-динамических процессов заключается в составлении дифференциальных уравнений, отражающих механизм преобразования входной координаты в выходную по каждому элементу структурной схемы (см. рис.1). Совокупность таких уравнений и описания внешних воздействий на систему, ограничений и начальных условий, функциональных и кинематических зависимостей и является математической моделью динамического процесса.
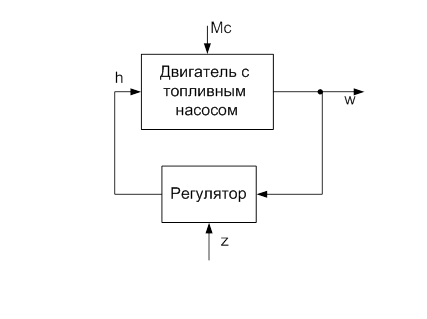
Рис.1. Структурная схема САР двигателя.
При исследованиях работы двигателя и регулятора в установившемся режиме (колебания «в малом») принято использовать линеаризованные дифференциальные уравнения. Это значит, что нелинейную характеристику элемента заменяют линейной на небольшом участке, где совершаются колебания относительно некоторого среднего положения. В теории регулирования показано, что погрешность от такого допущения мала, поэтому оно вполне корректно.
Следует отметить, что такая существенная нелинейность системы, как излом регуляторной характеристики на стыке регуляторного и корректорного участков, не может быть линеаризована без большой погрешности. Поэтому функциональная зависимость, отражающая эту нелинейность, должна быть описана в математической модели в полных координатах, а не в приращениях.
Достоверность математического описания тягово-динамических процессов в значительной мере зависит от полноты учета оснащенности трактора механизмами и системами, влияющими на его динамические свойства. Рассмотрим дифференциальные уравнения, описывающие процесс регулирования частоты вращения коленчатого вала двигателя для таких конструктивных вариантов как двигатель со свободным впуском и трактор с механической трансмиссией.
1.1 Уравнение двигателя
Составляя уравнение движения этого элемента, необходимо увязать в соответствии со структурной схемой (см. рис.1) изменение момента сопротивления ![]() на коленчатом валу с изменением его угловой скорости
на коленчатом валу с изменением его угловой скорости ![]() . Таким образом, работу двигателя с установившейся нагрузкой описывают уравнением движения (вращения) коленчатого вала.
. Таким образом, работу двигателя с установившейся нагрузкой описывают уравнением движения (вращения) коленчатого вала.
При действии на двигатель постоянным моментом сопротивления ![]() равновесное состояние описывается равенством:
равновесное состояние описывается равенством:
![]() , (1)
, (1)
где ![]() - крутящий момент двигателя.
- крутящий момент двигателя.
При введении в систему возмущения в виде приращения момента сопротивления равновесное состояние системы нарушится. Возникшая разность моментов вызовет ускорение или замедление угловой скорости коленчатого вала двигателя, вследствие чего возникнут инерционные силы
![]() , (2)
, (2)
где ![]() - момент инерции равный сумме момента инерции
- момент инерции равный сумме момента инерции ![]() вращающихся деталей двигателя, приведенный к коленчатому валу и момента инерции
вращающихся деталей двигателя, приведенный к коленчатому валу и момента инерции ![]() вращающихся деталей ведомой части муфты сцепления.
вращающихся деталей ведомой части муфты сцепления.
Уравнение (2) является уравнением движения коленчатого двигателя в полных координатах.
Известно, что крутящий момент двигателя является функцией двух переменных: угловой скорости коленчатого вала двигателя и положения рейки топливного насоса, т.е. ![]() . Для аппроксимации этой функции используют разные методы: метод опорных кривых с нелинейной интерполяцией между ними, аппроксимацию полиномами второй или третьей степени и др. [1]
. Для аппроксимации этой функции используют разные методы: метод опорных кривых с нелинейной интерполяцией между ними, аппроксимацию полиномами второй или третьей степени и др. [1]
Рассмотрим подробнее метод опорных кривых. В качестве опорных кривых выбираются скоростные характеристики двигателя (рис.2.) снятые по ГОСТ 18509-73 при закрепленной рейке (или дозаторе) регулятора топливного насоса.
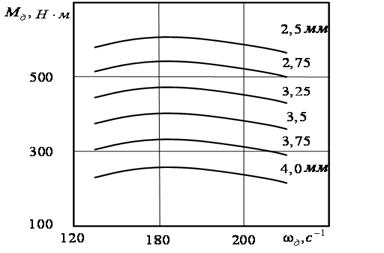
Рис.2. Скоростные характеристики двигателя СМД-60 при различных положениях рейки топливного насоса (h).
В соответствии с указанным методом крутящий момент двигателя ![]() представим в виде:
представим в виде:
![]() ,
,
![]() (3)
(3)
где ![]() и
и ![]() – функции переменной
– функции переменной ![]() , ограничивающие область значений по
, ограничивающие область значений по ![]() ;
; ![]() – функция двух переменных в относительных единицах, представляющая собой семейство нелинейных интерполирующих зависимостей (рис.3) перехода между граничными кривыми (рис.2.), соответствующими ходу рейки (дозатора) максимальной
– функция двух переменных в относительных единицах, представляющая собой семейство нелинейных интерполирующих зависимостей (рис.3) перехода между граничными кривыми (рис.2.), соответствующими ходу рейки (дозатора) максимальной ![]() и минимальной
и минимальной ![]() подаче топлива.
подаче топлива.
 .(4)
.(4)
При построении функции ![]() за относительную единицу принимаем разность ординат
за относительную единицу принимаем разность ординат ![]() и
и ![]() при соответствующем значении
при соответствующем значении ![]()
при ![]() ,
,  ;
;
при ![]() ,
,  ,
,
т. е. функция изменяется в пределах ![]()

Рис.3. Зависимость между коэффициентом интерполяции и ходом муфты регулятора.
Аппроксимация функции ![]() рассмотрена на примере двигателя СМД-60. В качестве опорных выбраны кривые, соответствующие
рассмотрена на примере двигателя СМД-60. В качестве опорных выбраны кривые, соответствующие ![]() и
и ![]()
Построенное таким образом семейство кривых ![]() для различных значений угловой скорости двигателя
для различных значений угловой скорости двигателя ![]() , может быть с некоторой погрешностью заменено одной средней кривой (в данном случае прямой
, может быть с некоторой погрешностью заменено одной средней кривой (в данном случае прямой ![]() ), которая изображена штриховой линией (см. рис.3). Для определения коэффициентов уравнения достаточно решить систему уравнений для граничных точек
), которая изображена штриховой линией (см. рис.3). Для определения коэффициентов уравнения достаточно решить систему уравнений для граничных точек ![]() ,
, ![]() и
и ![]() ,
, ![]()
 ,(4)
,(4)
откуда
![]() .(5)
.(5)
В рассматриваемом случае разность
![]()
![]()
С учетом уравнений (4) и (5) функциональная зависимость примет вид
 ,(6)
,(6)
а аппроксимированное уравнение движения коленчатого двигателя СМД-60 принимает вид:
![]() .(7)
.(7)
где ![]() - момент инерции равный сумме момента инерции вращающихся деталей двигателя, приведенный к коленчатому валу и момента инерции вращающихся деталей ведомой части муфты сцепления (для двигателя СМД-60
- момент инерции равный сумме момента инерции вращающихся деталей двигателя, приведенный к коленчатому валу и момента инерции вращающихся деталей ведомой части муфты сцепления (для двигателя СМД-60 ![]() ).
).
В уравнении ![]() - верхняя опорная кривая, соответствующая номинальному положению рейки (дозатору)
- верхняя опорная кривая, соответствующая номинальному положению рейки (дозатору) ![]() . В результате ее аппроксимации получили полином третьего порядка вида:
. В результате ее аппроксимации получили полином третьего порядка вида: ![]() . На примере двигателя СМД-60 (рис.2.)
. На примере двигателя СМД-60 (рис.2.) ![]() ,
, ![]() ,
, ![]() и
и ![]() .
.
Таблица 1
«Значение скоростной характеристики двигателя СМД-60»
| w | Mд |
| 130,00 | 580,00 |
| 140,00 | 590,00 |
| 150,00 | 597,50 |
| 160,00 | 601,50 |
| 170,00 | 600,00 |
| 180,00 | 595,50 |
| 190,00 | 590,00 |
| 200,00 | 582,50 |
| 209,44 | 572,2006 |
| 210,00 | 570,00 |
| 220,00 | 560,00 |
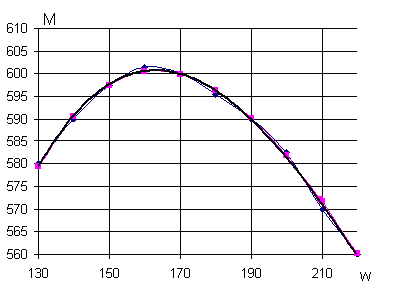
Рис.4. Скоростная характеристика двигателя СМД-60.
Для значений угловой скорости ![]() , необходимых при электроном моделировании для выхода в зону рабочей частоты используем линейную аппроксимацию
, необходимых при электроном моделировании для выхода в зону рабочей частоты используем линейную аппроксимацию ![]() .
.
Таблица 2
Значение скоростной характеристики двигателя при ![]()
| w | M |
| 130,00 | 580,00 |
| 140,00 | 590,00 |
| 150,00 | 597,50 |
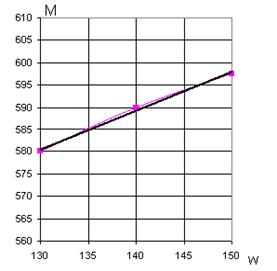
Рис.5. Скоростная характеристика двигателя при ![]() .
.
Значение номинальной угловой скорости ![]() определено в процессе стендовых испытаний двигателя (
определено в процессе стендовых испытаний двигателя (![]() ).
).
Похожие работы
... люфта рулевого колеса была экспериментально исследована на примере выборки (25 ед.) автомобилей «ГАЗ-24Т». Причём, 1 мм смещений в РП соответствует 2,5° угла поворота рулевого колеса. При выполнении экспериментальных исследований использовались методы блочного рандомизированного планирования, а их результаты были подвергнуты одномерному статистическому и дисперсионному анализу. На рисунке 22 в ...
... проведения коррекции траектории МКА, моделирования процесса, и расчет потребного топлива для проведения коррекции траектории. 3) Исследование динамики системы коррекции траектории при стабилизации углового положения в процессе проведения коррекции траектории МКА. 2.4. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ЦЕНТРА МАСС МКА 2.4.1.УРАВНЕНИЕ ДВИЖЕНИЯ КА Рассмотрим невозмущенное движение материальных точек М и m в ...
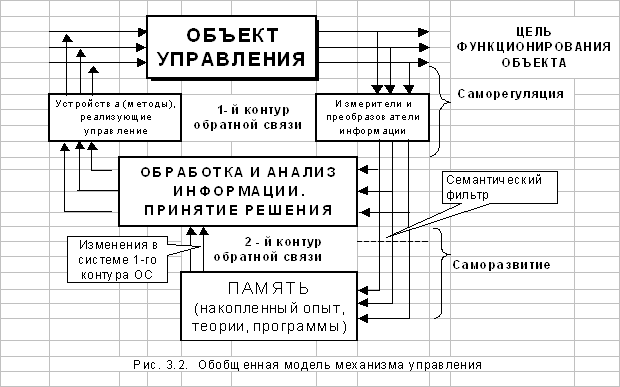
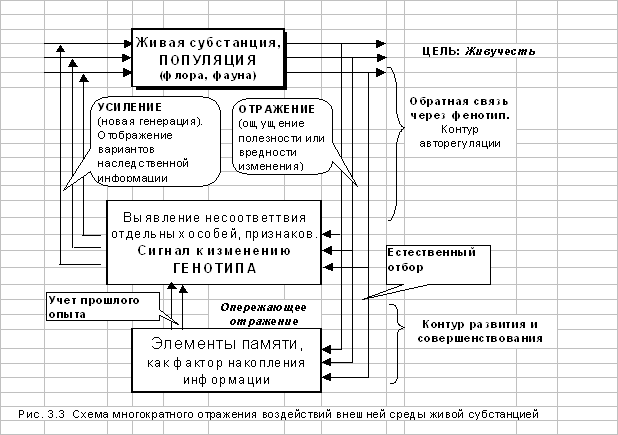
... Возникшие потребности в научно обоснованных методах и средствах управления нашли свое выражение в кибернетике - науке об управлении и системном анализе, особым предметом исследования которых являются сложные и очень сложные системы окружающего мира. 4.4 Организационные системы Традиционно современная кибернетика рассматривала, в основном, простые и сложные управляемые системы, для которых ...
... ротора и значительно большим уровням полезной нагрузки. Исходя из теоретических предположений, зависимость выделяемой механической энергии от внутренних параметров магнитной системы конвертора и скорости вращения ротора носит нелинейный характер и полученные эффекты не являются оптимальными. С этой точки зрения, выявление максимальной мощности, максимального изменения веса и ресурса конвертора ...
0 комментариев