Навигация
Уравнение регулятора скоростного режима двигателя
47864
знака
14
таблиц
49
изображений
1.2 Уравнение регулятора скоростного режима двигателя
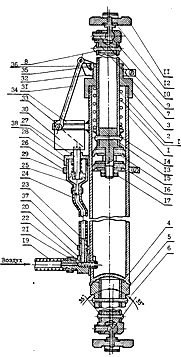
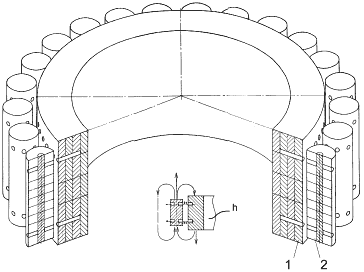
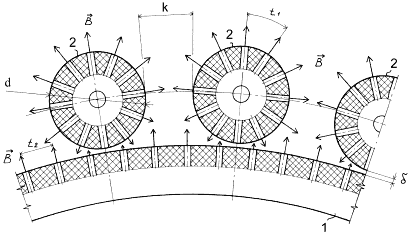
На тракторных двигателях применяют всережимные механические регуляторы прямого действия с центробежным чувствительным элементом (см. рис.9.). Математическое описание работы такого регулятора в соответствии со структурной схемой САР (см. рис.1.) должно выражать зависимость изменения положения органа управления подачей топлива при изменении скоростного режима двигателя. В зависимости от типа топливного насоса органом, управляющим подачей топлива, является рейка или дозатор, связанные кинематически с муфтой регулятора. Поэтому положение рейки или дозатора топливного насоса определяется положением муфты регулятора, которое зависит от соотношения поддерживающей и восстанавливающей сил регулятора.
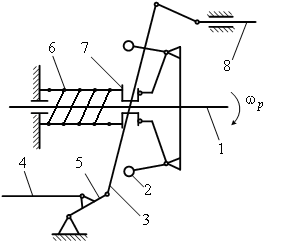
Рис.6. Схема регулятора скоростного режима двигателя.
Восстанавливающая сила ![]() - это сила упругости пружины 6 (см. рис.6.). Ее значение определяют по предварительной затяжке пружины, осуществляемой трактористом с помощью рычага подачи топлива. При данной предварительной затяжке пружины значение
- это сила упругости пружины 6 (см. рис.6.). Ее значение определяют по предварительной затяжке пружины, осуществляемой трактористом с помощью рычага подачи топлива. При данной предварительной затяжке пружины значение ![]() определяется положением муфты регулятора, т.е.
определяется положением муфты регулятора, т.е. ![]() .
.
Поддерживающая сила ![]() - это приведенная к муфте центробежная сила грузов 2. Она определяется угловой скоростью
- это приведенная к муфте центробежная сила грузов 2. Она определяется угловой скоростью ![]() их вращения;
их вращения; ![]() - коэффициент поддерживающей силы, зависящий от положения муфты регулятора,
- коэффициент поддерживающей силы, зависящий от положения муфты регулятора, ![]()
Таким образом, на муфту регулятора действуют две противоположно направленные силы, которые и определяют ее статическое равновесие (при ![]() )
)
![]() ,(8)
,(8)
где ![]() - угловая скорость вала регулятора.
- угловая скорость вала регулятора.
При нарушении скоростного режима или предварительной затяжки пружины статическое равновесие нарушается. При изменении угловой скорости поддерживающая сила получает приращение ![]() , вызывающее перемещение
, вызывающее перемещение ![]() муфты. В результате этого деформируется пружина и возникает приращение восстанавливающей силы
муфты. В результате этого деформируется пружина и возникает приращение восстанавливающей силы ![]() . Вследствие нарушения статического равновесного режима возникают инерционные силы
. Вследствие нарушения статического равновесного режима возникают инерционные силы ![]() от массы грузов и связанных с муфтой деталей регулятора и топливного насоса.
от массы грузов и связанных с муфтой деталей регулятора и топливного насоса.
Кроме перечисленных сил в процессе движения муфты регулятора действуют силы жидкостного трения. Силами трения без смазки обычно пренебрегают.
Известно, что сила жидкостного трения пропорциональна скорости перемещения ![]() . Если принять в качестве коэффициента пропорциональности фактор торможения
. Если принять в качестве коэффициента пропорциональности фактор торможения ![]() , значения которого зависят от параметров смазки и числа сопрягающихся поверхностей, то сила жидкостного трения или демпфирования может быть выражена в качестве произведения
, значения которого зависят от параметров смазки и числа сопрягающихся поверхностей, то сила жидкостного трения или демпфирования может быть выражена в качестве произведения ![]() .
.
Таким образом, известны все составляющие баланса сил, действующих на муфту регулятора при нарушении ее равновесного состояния. С учетом этих составляющих уравнение движения муфты регулятора в полных координатах примет вид
![]() .(9)
.(9)
Зависимость восстанавливающей силы ![]() и инерционного коэффициента
и инерционного коэффициента ![]() от хода муфты регулятора строится на основании статического расчета по конструктивным характеристикам регулятора. Такие характеристики для регулятора типа НД-22/6 двигателя СМД-60 показаны соответственно на рис.7. и рис.8.
от хода муфты регулятора строится на основании статического расчета по конструктивным характеристикам регулятора. Такие характеристики для регулятора типа НД-22/6 двигателя СМД-60 показаны соответственно на рис.7. и рис.8.
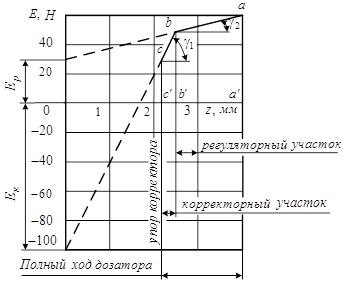
Рис.7. Зависимость восстанавливающей силы ![]() регулятора от перемещения муфты
регулятора от перемещения муфты ![]() топливного насоса НД-22/6.
топливного насоса НД-22/6.
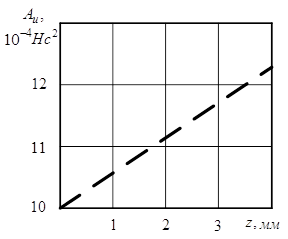
Рис.8. Зависимость коэффициента инерционности грузов ![]() регулятора от перемещения муфты
регулятора от перемещения муфты ![]() .
.
График восстанавливающей силы ![]() аппроксимируют уравнениями[2]:
аппроксимируют уравнениями[2]:
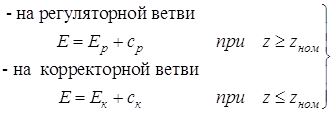 (10)
(10)
где ![]() и
и ![]() - значения восстанавливающей силы на регуляторном и корректорном участках при
- значения восстанавливающей силы на регуляторном и корректорном участках при ![]() ;
; ![]() и
и ![]() - коэффициенты уравнения равные тангенсам угла наклона графиков восстанавливающей силы к оси абсцисс соответственно на регуляторном и корректорном участках.
- коэффициенты уравнения равные тангенсам угла наклона графиков восстанавливающей силы к оси абсцисс соответственно на регуляторном и корректорном участках.
Графическую зависимость инерционного коэффициента ![]() от хода муфты регулятора
от хода муфты регулятора ![]() аппроксимируют выражением:
аппроксимируют выражением:
![]() ,(11)
,(11)
где ![]() - значения инерционного коэффициента при
- значения инерционного коэффициента при ![]() ;
; ![]() - коэффициент уравнения равный тангенсу угла наклона графика инерционного коэффициента к оси абсцисс.
- коэффициент уравнения равный тангенсу угла наклона графика инерционного коэффициента к оси абсцисс.
Положение дозирующего органа ![]() определяют положением муфты регулятора
определяют положением муфты регулятора ![]() . Конструктивно в регуляторе типа НД-22/6 ход муфты регулятора z равен ходу дозатора
. Конструктивно в регуляторе типа НД-22/6 ход муфты регулятора z равен ходу дозатора ![]() , т. е.
, т. е. ![]() .
.
Значение фактора демпфирования ![]() для регулятора типа НД-22/6 по данным ЦНИИТА принято постоянным, не зависящим от положения дозатора (
для регулятора типа НД-22/6 по данным ЦНИИТА принято постоянным, не зависящим от положения дозатора (![]() ). Масса движущихся частей регулятора и топливного насоса двигателя СМД-60 по данным ЦНИИТА
). Масса движущихся частей регулятора и топливного насоса двигателя СМД-60 по данным ЦНИИТА ![]() .
.
Таким образом, для регулятора типа НД-22/6 исходное уравнение (9) с учетом выше приведенных зависимостей (10) и (11) после аппроксимации для регуляторного и корректорного участка имеет вид:
 (12)
(12)
Таблица 3
Расчет коэффициентов уравнения регулятора
| N, Нс/м | 120 | N/m | 1290,3 |
| A, Нс2 | 0,001 | A/m | 0,0107527 |
| Ep, Н | 29,477 | Ep/m | 316,957 |
| Ek, Н | 100 | Ek/m | 1075,27 |
| Cp, Н/м | 8330 | Cp/m | 89570 |
| Ck, Н/м | 60120,8 | Ck/m | 646460 |
| Ca, Нс/м | 0,05870 | Ca/m | 0,6312 |
Таблица 4
Зависимость положения рейки от угловой скорости
| w | h |
| 0 | |
| 20 | 0,001670624 |
| 40 | 0,001692575 |
| 60 | 0,001729275 |
| 80 | 0,001780898 |
| 100 | 0,00184769 |
| 120 | 0,00192997 |
| 140 | 0,00202814 |
| 160 | 0,002142683 |
| 180 | 0,002274174 |
| 200 | 0,002423284 |
| 209,4395102 | 0,0025 |
| 209,4395102 | 0,0025 |
| 210 | 0,002546956 |
| 215 | 0,00298186 |
| 220 | 0,003447467 |
| 225 | 0,003946736 |
| 230 | 0,004483033 |
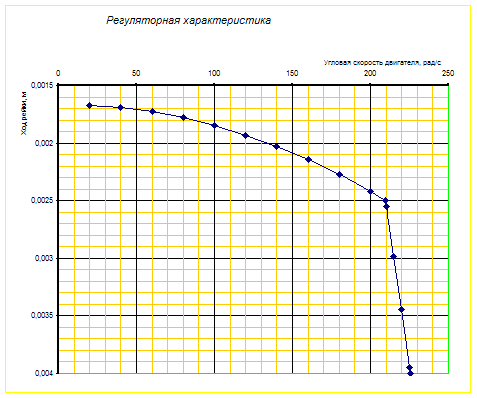
Рис.9. Зависимость положения рейки от угловой скорости.
На основе полученных математических моделей, промоделируем в пакете Simulink.
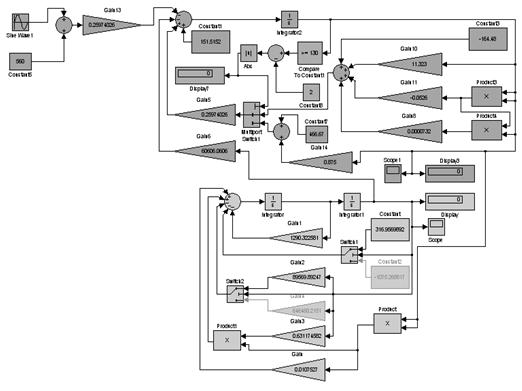
Рис.10. Модель двигателя с регулятором при неизвестной нагрузке.
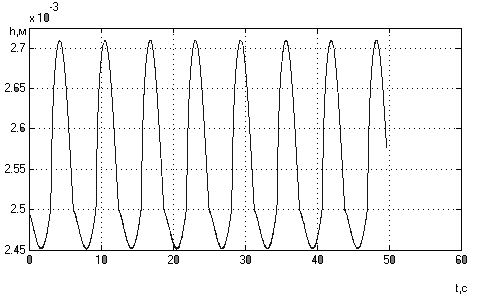
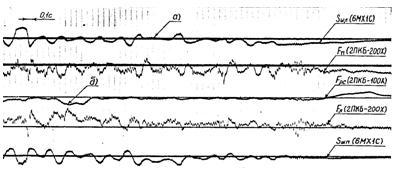
Рис.11. График перемещения рейки регулятора.

Рис.12а. График изменения оборотов двигателя на разгонном участке.
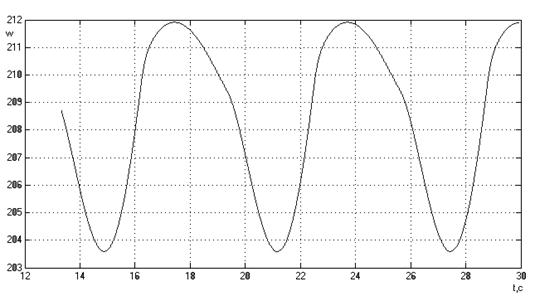
Рис.12б. График изменения оборотов двигателя.
Похожие работы
... люфта рулевого колеса была экспериментально исследована на примере выборки (25 ед.) автомобилей «ГАЗ-24Т». Причём, 1 мм смещений в РП соответствует 2,5° угла поворота рулевого колеса. При выполнении экспериментальных исследований использовались методы блочного рандомизированного планирования, а их результаты были подвергнуты одномерному статистическому и дисперсионному анализу. На рисунке 22 в ...
... проведения коррекции траектории МКА, моделирования процесса, и расчет потребного топлива для проведения коррекции траектории. 3) Исследование динамики системы коррекции траектории при стабилизации углового положения в процессе проведения коррекции траектории МКА. 2.4. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ЦЕНТРА МАСС МКА 2.4.1.УРАВНЕНИЕ ДВИЖЕНИЯ КА Рассмотрим невозмущенное движение материальных точек М и m в ...
... Возникшие потребности в научно обоснованных методах и средствах управления нашли свое выражение в кибернетике - науке об управлении и системном анализе, особым предметом исследования которых являются сложные и очень сложные системы окружающего мира. 4.4 Организационные системы Традиционно современная кибернетика рассматривала, в основном, простые и сложные управляемые системы, для которых ...
... ротора и значительно большим уровням полезной нагрузки. Исходя из теоретических предположений, зависимость выделяемой механической энергии от внутренних параметров магнитной системы конвертора и скорости вращения ротора носит нелинейный характер и полученные эффекты не являются оптимальными. С этой точки зрения, выявление максимальной мощности, максимального изменения веса и ресурса конвертора ...
0 комментариев