Навигация
Исследование характеристик двигателя постоянного тока независимого возбуждения
7903
знака
0
таблиц
20
изображений
Задание 1

Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения
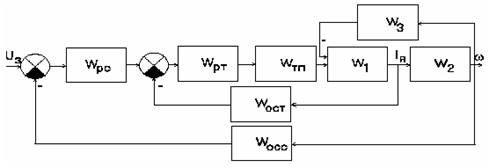
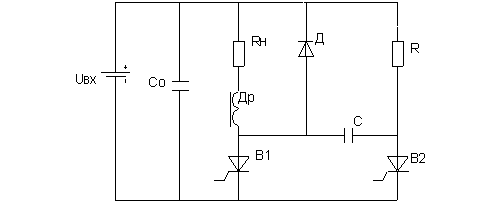
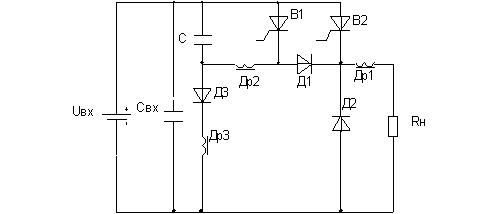
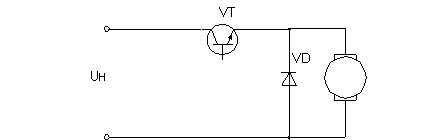
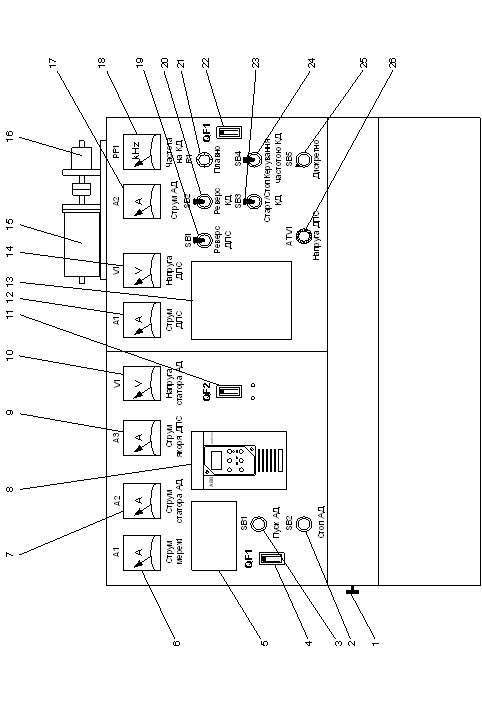
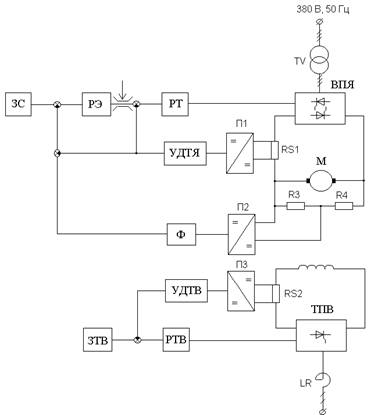
Двигатель постоянного тока независимого возбуждения подключен по схеме, приведенной на рис. 1.
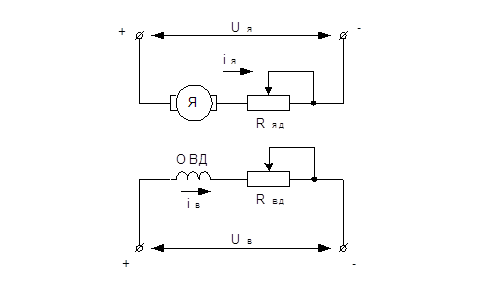
Рис. 1
Вышеприведенная система математически описывается системой дифференциальных уравнений:

где Uя, Uв, – напряжение на обмотке якоря и возбуждения (ОВД),
iя, iв , – ток якоря и обмотки возбуждения,
R я S, Rв – сопротивление якоря и обмотки возбуждения,
L я, Lв – индуктивность якоря и обмотки возбуждения,
Ф – магнитный поток обмотки возбуждения,
K – конструктивный коэффициент,
М – электромагнитный момент двигателя,
Мс - момент статического сопротивления двигателя,
JS - момент инерции двигателя,
![]()
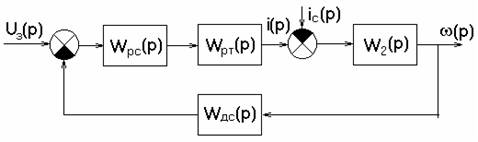
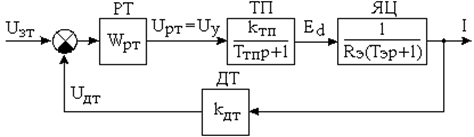
По приведенным уравнениям составим математическую модель двигателя постоянного тока независимого возбуждения ( рис. 2).
![]()
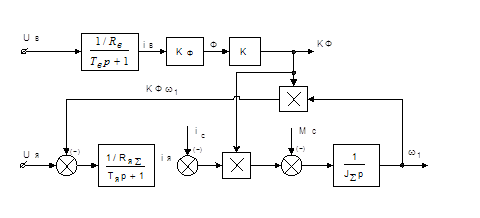
Рис. 2
Исходные данные для двигателя П 61 мощности PН = 11 кВт:
номинальное напряжение питания Uн =220 В,
номинальная скорость вращения n = 1500 об/мин,
номинальный ток в цепи якоря Iя. н. = 59,5 А,
сопротивление цепи якоря RЯS = 0,187 Ом,
сопротивление обмотки возбуждения RВ = 133 Ом,
число активных проводников якоря N = 496,
число параллельных ветвей якоря 2a = 2,
число витков полюса обмотки возбуждения wв =1800,
полезный магнитный поток одного полюса Ф = 8,2 мВб,
номинальный ток возбуждения обмотки возбуждения
IВ. Н. = 1,25 А,
максимальная допускаемая частота вращения 2250 об/мин,
момент инерции якоря J1= 0,56 кг×м2,
двигатель двухполюсный 2Pn=2,
масса двигателя Q = 131 кг.
Произведем необходимые расчеты.
1. Угловая скорость
![]()
2. Конструктивный коэффициент двигателя
![]()
3. Постоянная времени цепи возбуждения
![]()
![]()
4. Постоянная времени цепи якоря
5. Коэффициент Кф
![]()
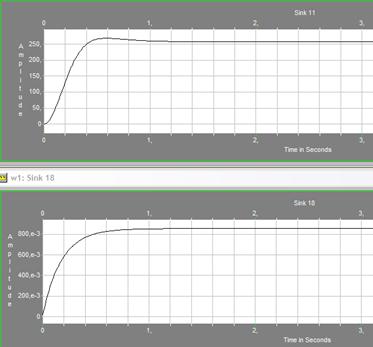
Все полученные данные подставляем в структурную схему (рис. 2) и проведем ее моделирование с помощью программного пакета Matlab. Величины Uя= Uв= Uс подаются на входы схемы ступенчатым воздействием. На выходе снимаем значение скорости вращения двигателя w1. Динамическая характеристика двигателя (график изменения скорости w1(t) при номинальных параметрах и Мс=0) изображена на рис. 3. График показывает выход скорости на установившееся значение при включении двигателя.
График изменения скорости КФ(t) приведен на рис. 4.
|
|
Рис. 3 – Переходная характеристика для одномассовой
системы в режиме холостого хода.
Рис. 4 – Процесс изменения КФ(t).
Из графика находим: ![]()
Расчетное значение: ![]()
Как мы видим, расчетное значение значительно отличается от значения, полученного экспериментально при моделировании системы. Это объясняется тем, что расчеты мы выполняли по эмпирическим формулам и не учли все параметры модели. Однако для нас наиболее важно получить качественные характеристики, а не количественные. А это наша модель позволяет сделать.
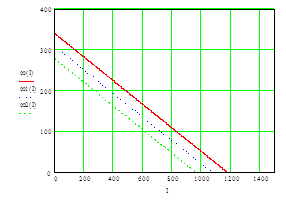
Статическая характеристика двигателя – это изменение установившейся скорости вращения двигателя w1 при изменении тока якоря Iя (электромеханическая характеристика) или нагрузки Мс (механическая характеристика). Для получения электромеханической характеристики последовательно изменяют Ic=0, Iн А и снимают установившееся значение скорости w1. По полученным значениям строят график.
Таким образом получают естественную электромеханическую характеристику. Искусственные электромеханические характеристики получают при изменении Uc, Rя и Ф. Зависимость w1 от этих величин описывается формулой: ![]() Итак, значение w1 при Ic=0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Ic, которое становится равным Iн=59,5 А и получаем переходный процесс (см. рис. 5).
Итак, значение w1 при Ic=0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Ic, которое становится равным Iн=59,5 А и получаем переходный процесс (см. рис. 5).
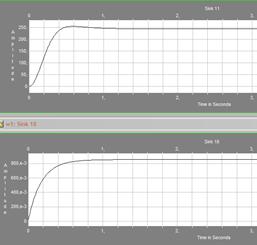
Рис. 5
Из графика находим:
![]()
Расчетное значение
![]() .
.
Естественная электромеханическая характеристика приведена на рис. 6.
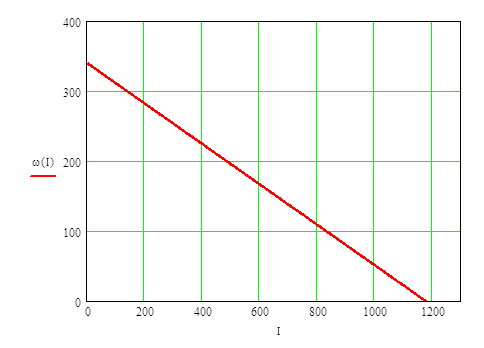
Рис. 6
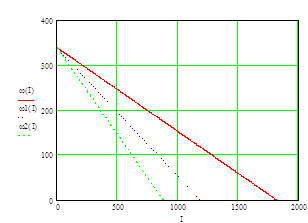
Для получения механической характеристики последовательно изменяют Мс=0, Мн Н×м и снимают установившееся значение скорости w1. По полученным значениям строят график. Таким образом получают естественную механическую характеристику. Искусственные механические характеристики получают при изменении Uc, Rя и Ф.
Зависимость w1 от этих величин описывается формулой:
![]() .
.
Итак, значение w1 при Мс=0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение Мс, которое становится равным Мн=КФIн.
![]()
Получаем переходный процесс (см. рис. 7).
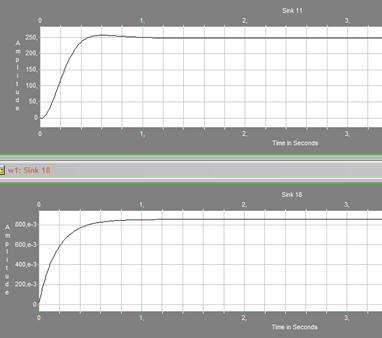
Рис. 7
Из графика находим:![]() Расчетное значение
Расчетное значение ![]()
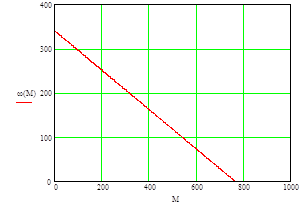
Естественная механическая характеристика приведена на рис. 8.
Перейдем к построению искусственных характеристик.
1. Искусственные электромеханические характеристики при изменении Uя.
|
|
|
Рис. 9
Uя=200В, ωхх=308,97 с-1, ω=291,78 с-1
Uя=180В, ωхх=278,07 с-1, ω=260,89 с-1
2. Искусственные электромеханические характеристики при изменении Rя.
|
|
|
Рис. 10
Rя=0,287 Ом, ωхх=339,87 с-1, ω=313,49 с-1
Rя=0,387 Ом, ωхх=339,87 с-1, ω=304,297 с-1
Похожие работы
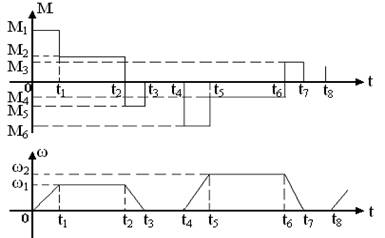
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
... Параметры обратного диода Максимально допустимый прямой импульсный ток Iи. пр. max= 60 А Максимально допустимое обратное импульсное напряжение Uи. обр= 400 В Максимальная частота f = 50 кГц 7. Расчет преобразователя При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря ...
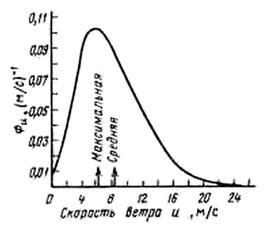
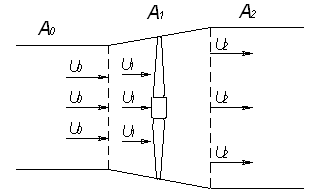
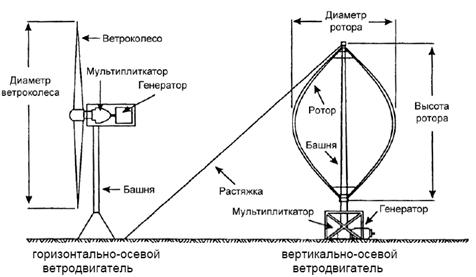
... (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами. Рисунок 1.9 – Структурная схема ВЭУ Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, ...
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...
0 комментариев