Навигация
Искусственные электромеханические характеристики при изменении Ф
7903
знака
0
таблиц
20
изображений
3. Искусственные электромеханические характеристики при изменении Ф.
|
|
|
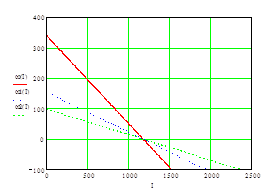
Рис. 11
Ф=0,0182 Вб, ωхх=153,13 с-1, ω=145,39 с-1
Ф=0,0282 Вб, ωхх=98,83 с-1, ω=93,83 с-1
4. Искусственные механические характеристики при изменении Uя.
|
|
|
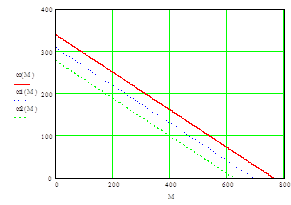
Рис. 12
Uя=200 В, ωхх=308,97 с-1, ω=291,78 с-1
Uя=180 В, ωхх=278,07 с-1, ω=162,81 с-1
5. Искусственные механические характеристики при изменении Rя.
|
|
|
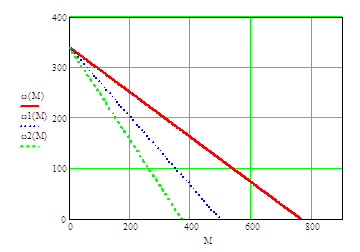
Рис. 13
Rя=0,287 Ом, ωхх=339,87 с-1, ω=313,49 с-1
Rя=0,387 Ом, ωхх=339,87 с-1, ω=304,3 с-1
6. Искусственные механические характеристики при изменении Ф.
|
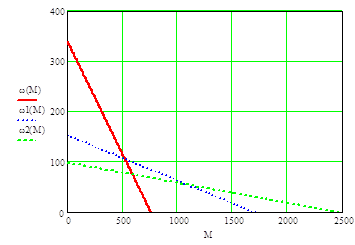
Рис. 14
Ф=0,0182 Вб, ωхх=153,13 с-1, ω=149,66 с-1
Ф=0,0282 Вб, ωхх=98,83 с-1, ω=97,38 с-1
Выводы: при уменьшении напряжения якоря установившееся значение угловой скорости уменьшается. При увеличении дополнительного сопротивления якоря значение угловой скорости остается прежним при холостом ходе и уменьшается при механических и электрических воздействиях. При увеличении магнитного потока значение угловой скорости уменьшается.
Задание 2
Исследование характеристик двигателя постоянного тока независимого возбуждения в двухмассовой упругой системе
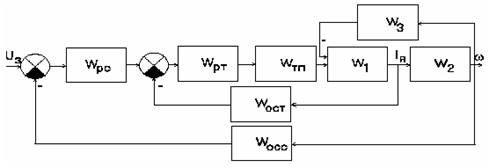
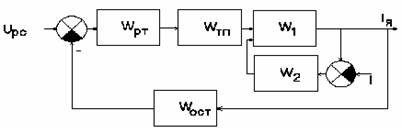
В двухмассовой системе двигатель подключается к нагрузке через упругое звено. Структурная схема такого включения изображена на рис. 15.
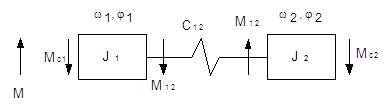
Рис. 15 – Структурная схема двухмассовой упругой электромеханической системы
Здесь используются следующие обозначения:
М – электромагнитный момент двигателя,
Мс1 - момент статического сопротивления двигателя,
Мс2 - момент статического сопротивления нагрузки,
М12 - момент сопротивления упругой связи,
С12 – коэффициент жесткости упругой связи,
![]() – скорость вращения вала двигателя,
– скорость вращения вала двигателя,
![]() – скорость вращения рабочего органа,
– скорость вращения рабочего органа,
J 1 - момент инерции двигателя,
J 2 - момент инерции рабочего органа.
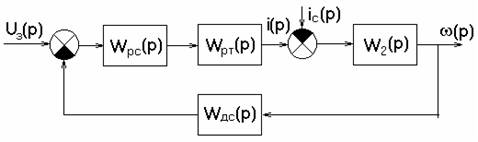
Для случая упругой связи в структурную схему математической модели (рис. 2) необходимо добавить соответствующие элементы. Полученная схема изображена на рис. 16.
С помощью данной схемы смоделируем поведение двухмассовой упругой электромеханической системы с двигателем постоянного тока независимого возбуждения. На входы схемы Мс1 и Мс2 подаем значения Мс1 = Мс2 = 0. Остальные параметры – номинальные. С выхода схемы снимаем переходную характеристику угловой скорости вращения рабочего органа ![]() и вала двигателя
и вала двигателя ![]() .
.
Исследуем переходные процессы ![]() (t) и
(t) и ![]() (t), изменяя моменты инерции двигателя и рабочего органа.
(t), изменяя моменты инерции двигателя и рабочего органа.
![]()
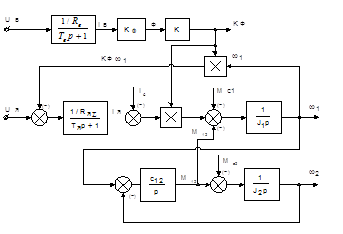
Рис. 16 – Структурная схема для моделирования двухмассовой упругой системы с двигателем постоянного тока независимого возбуждения
Примем j1-j2=1°,
тогда коэффициент жесткости
![]()
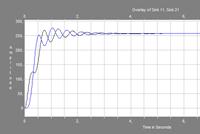
1. Пусть J1=J2=0.56 кг×м2
|
|
2. Примем J1>J2 (0.84>0.56)
|
|
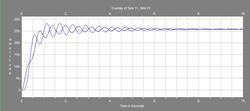
Рис. 18 – Переходные процессы ![]() (t) и
(t) и ![]() (t)
(t)
3. Примем J1<J2 (0.56<0.84)
|
|
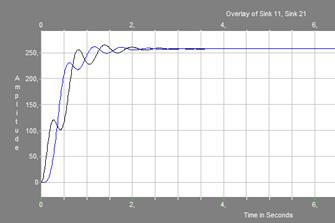
Рис. 19 - Переходные процессы ![]() (t) и
(t) и ![]() (t)
(t)
Вывод: при увеличении момента инерции механизма время регулирования уменьшается, а при уменьшении – увеличивается.
Похожие работы
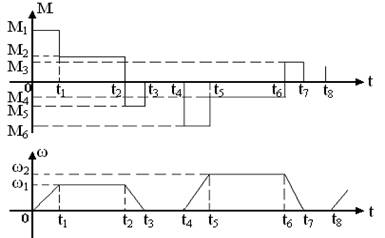
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
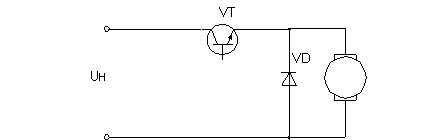
... Параметры обратного диода Максимально допустимый прямой импульсный ток Iи. пр. max= 60 А Максимально допустимое обратное импульсное напряжение Uи. обр= 400 В Максимальная частота f = 50 кГц 7. Расчет преобразователя При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря ...
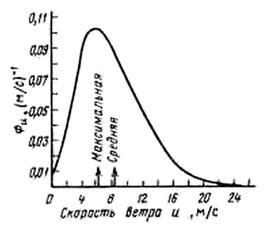
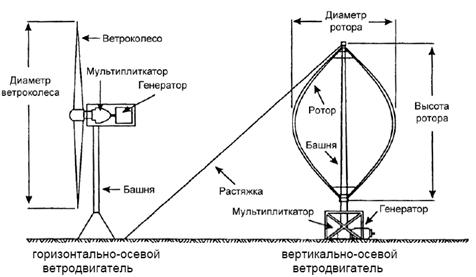

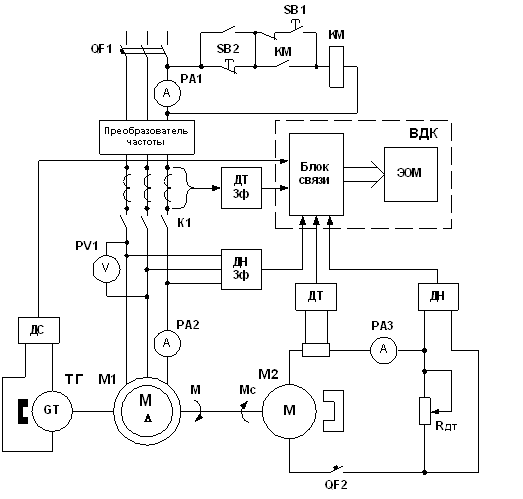
... (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами. Рисунок 1.9 – Структурная схема ВЭУ Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, ...
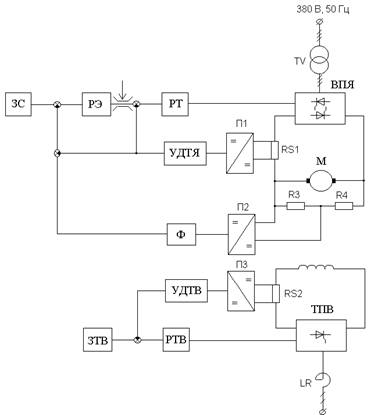
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...
0 комментариев