Навигация
Решения задач линейного программирования геометрическим методом
32249
знаков
6
таблиц
16
изображений
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
«ПРИДНЕСТРОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ им. Т.Г. ШЕВЧЕНКО»
РЫБНИЦКИЙ ФИЛИАЛ
КАФЕДРА «ФИЗИКИ, МАТЕМАТИКИ И ИНФОРМАТИКИ»
Курсовая работа
по дисциплине
"Исследование операций"
на тему:
“Решения задач линейного программирования геометрическим методом”
Выполнила:
студентка III курса
специальности “Информатика с доп. спец. английский язык”
Нистор А.Г.
Проверила:
преподаватель Панченко Т.А.
г. Рыбница
2008 г.
ОГЛАВЛЕНИЕ
Введение. 3
I. ТЕОРЕТИЧЕСКИЙ РАЗДЕЛ.. 4
1.1 Линейное программирование. 4
1.2 Формулировка задачи. 5
1.3 Основные понятия линейной алгебры и выпуклого анализа, применяемые в теории математического программирования. 7
1.4 Математические основы решения задачи линейного программирования графическим способом. 9
1.4.1 Математический аппарат. 9
1.4.2 Геометрическая интерпретация задачи линейного программирования. 11
1.4.3 Этапы решения графического метода задач линейного программирования 13
II. ПРАКТИЧЕСКИЙ РАЗДЕЛ.. 18
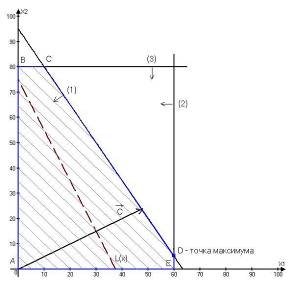
Задача № 1. 18
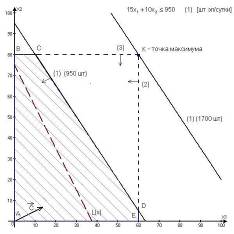
Задача № 2. 21
Задача № 3. 24
Задача № 4. 27
Задача № 5. 30
Заключение. 33
Список литературы.. 34
ВВЕДЕНИЕ
Линейное программирование - это наука о методах исследования и
отыскания наибольших и наименьших значений линейной функции, на неизвестные которой наложены линейные ограничения. Таким образом, задачи линейного программирования относятся к задачам на условный экстремум функции. Казалось бы, что для исследования линейной функции многих переменных на условный экстремум достаточно применить хорошо разработанные методы математического анализа, однако невозможность их использования можно довольно просто проиллюстрировать.
Для решения задач линейного программирования потребовалось создание специальных методов. В данной курсовой работе будет рассмотрен геометрический метод решения задач линейного программирования. Геометрический метод применяется в основном при решении задач двумерного пространства и только некоторых задач трехмерного пространства, так как довольно трудно построить многогранник решений, который образуется в результате пересечения полупространств. Задачу пространства размерности больше трех изобразить графически вообще невозможно.
Таким образом, целью данной курсовой работы является: освоить навыки использования геометрического метода для решения задач линейного программирования. Для этого были поставлены следующие задачи:
1) Изучить теоретические сведения, необходимые для решения задач линейного программирования геометрическим методом.
2) Разобрать алгоритм решения ЗЛП геометрическим методом.
3) Решить поставленные задачи, используя рассмотренный метод решения задач линейного программирования.
I. ТЕОРЕТИЧЕСКИЙ РАЗДЕЛ 1.1 Линейное программирование
Линейное программирование — математическая дисциплина, посвященная теории и методам решения задач об экстремумах линейных функций на множествах n-мерного векторного пространства, задаваемых системами линейных уравнений и неравенств.
Линейное программирование является частным случаем математического программирования. Одновременно оно - основа нескольких методов решения задач целочисленного и нелинейного программирования.
Многие свойства задач линейного программирования можно интерпретировать также как свойства многогранников и таким образом геометрически формулировать и доказывать их.
Термин «программирование» нужно понимать в смысле «планирования». Он был предложен в середине 1940-х годов Джорджем Данцигом, одним из основателей линейного программирования, еще до того, как компьютеры были использованы для решения линейных задач оптимизации.
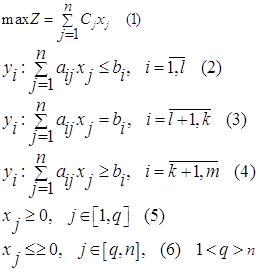
Математическая формулировка задачи линейного программирования

Нужно максимизировать
при условиях при i = 0, 1, 2, . . . , m .
Иногда на xi также накладывается некоторый набор ограничений в виде равенств, но от них можно избавиться, последовательно выражая одну переменную через другие и подставляя ее во всех остальных равенствах и неравенствах (а также в функции f).
Такую задачу называют "основной" или "стандартной" в линейном программировании.
1.2 Формулировка задачиДаны линейная функция Z=С1х1+С2х2+...+СNxN(1.1)
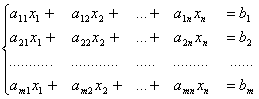
и система линейных ограничений
a11x1 + a22x2 + ... + a1NХN = b1
a21x1 + a22x2 + ... + a2NХN = b2
. . . . . . . . . . . . . . .
ai1x1 + ai2x2 + ... + aiNХN = bi (1.2) . . . . . . . . . . . . . . .
aM1x1 + aM2x2 + ... + aMNХN = bM
xj 0 (j = 1, 2, ... ,n) (1.3)
где аij, bj и Сj - заданные постоянные величины.
Найти такие неотрицательные значения х1, х2, ..., хn, которые удовлетворяют системе ограничений (1.2) и доставляют линейной функции (1.1) минимальное значение.
Общая задача имеет несколько форм записи.
Векторная форма записи. Минимизировать линейную функцию Z = СХ при ограничениях А1х1 + А2x2 + ... + АNxN = Ао, X0 (1.4)
где С = (с1, с2, ..., сN); Х = (х1, х2, ..., хN); СХ - скалярное произведение; векторы A1 = A2 = ,..., AN состоят соответственно из коэффициентов при неизвестных и свободных членах.
Матричная форма записи. Минимизировать линейную функцию, Z = СХ при ограничениях АХ = А0Х0, где С = (с1, с2, ..., сN) - матрица-cтрока; А = (аij) - матрица системы; Х =(xij)- матрица-столбец, А0 = (аi) матрица-столбец
Запись с помощью знаков суммирования. Минимизировать линейную функцию Z = Сjхj при ограничениях
0пределение 1. Планом или допустимым решением задачи линейного программирования называется Х = (х1, х2, ..., хN), удовлетворяющий условиям (1.2) и (1.3).
0пределение 2. План Х = (х1, х2, ..., хN) называется опорным, если векторы А (i = 1, 2, ..., N), входящие в разложение (1.4) с положительными коэффициентами х , являются линейно независимыми.
Так как векторы А являются N-мерными, то из определения опорного плана следует, что число его положительных компонент не может превышать М.
0пределение 3. Опорный план называется невырожденным, если он содержит М положительных компонент, в противном случае опорный план называется вырожденным.
0пределение 4. Оптимальным планом или оптимальным решением задачи линейного программирования называется план, доставляющий наименьшее (наибольшее) значение линейной функции.
В дальнейшем рассмотрено решение задач линейного программирования, связанных с нахождением минимального значения линейной функции. Там, где необходимо найти максимальное значение линейной функции, достаточно заменить на противоположный знак линейной функции и найти минимальное значение последней функции. Заменяя на противоположный знак полученного минимального значения, определяем максимальное значение исходной линейной функции.
1.3 Основные понятия линейной алгебры и выпуклого анализа, применяемые в теории математического программирования
Кратко напомним некоторые фундаментальные определения и теоремы линейной алгебры и выпуклого анализа, которые широко применяются при решении проблем как линейного, так и нелинейного программирования.
Фундаментальным понятием линейной алгебры является линейное (вещественное) пространство. Под ним подразумевается множество некоторых элементов (именуемых векторами или точками), для которых заданы операции сложения и умножения на вещественное число (скаляр), причем элементы, являющиеся результатом выполнения операций, также в соответствии с определением должны принадлежать исходному пространству.
Частными случаями линейных пространств являются вещественная прямая, плоскость, геометрическое трехмерное пространство.
Вектор λ1a1 + λ2a2 + …+ λmam называется линейной комбинацией векторов а1 а2,..., аm с коэффициентами λ1, λ2, λm,
Система векторов линейного пространства а1 а2,..., аm называется линейно зависимой, если существуют такие числа λ1, λ2, λm не равные одновременно нулю, что их линейная комбинация λ1a1 + λ2a2 + …+ λmam равняется нулевому вектору (вектору, все компоненты которого равны нулю). В противном случае систему а1, а2,..., аm называют линейно независимой, т. е. линейная комбинация данных векторов может быть равна нулевому вектору только при нулевых коэффициентах λ1, λ2, …, λm
Максимально возможное количество векторов, которые могут образовывать линейно независимую систему в данном линейном пространстве, называют размерностью пространства, а любую систему линейно независимых векторов в количестве, равном размерности, — базисом пространства.
Линейное пространство обычно обозначают как Rn, где n — его размерность.
Любое подмножество данного линейного пространства, которое само обладает свойствами линейного пространства, называется линейным подпространством. Множество Н, получаемое сдвигом некоторого линейного подпространства L ? Rn на вектор a ? Rn: H=L+a, называется аффинным множеством (пространством). Если фундаментальным свойством любого линейного пространства или подпространства является принадлежность ему нулевого вектора, то для аффинного множества это не всегда так. На плоскости примером подпространства является прямая, проходящая через начало координат, а аффинного множества — любая прямая на плоскости. Характеристическим свойством аффинного множества является принадлежность ему любой прямой, соединяющей две любые его точки. Размерность аффинного множества совпадает с размерностью того линейного подпространства, сдвигом которого оно получено.
Если рассматривается некоторое линейное пространство Rn, то принадлежащие ему аффинные множества размерности 1 называются прямыми, а размерности (n-1)—гиперплоскостями. Так, обычная плоскость является гиперплоскостью для трехмерного геометрического пространства R3, а прямая — гиперплоскостью для плоскости R2. Всякая гиперплоскость делит линейное пространство на два полупространства.
Множество V векторов (точек) линейного пространства Rn называется выпуклым, если оно содержит отрезок прямой, соединяющей две его любые точки, или, другими словами, из того, что a ?V и b?V , следует, что х = (1- λ) х а+ λ х b ? V , где 0 ≤ λ ≤ 1.
Линейная комбинация ![]() векторов а1, а2... аm называется выпуклой, если λi ≥0, i ?1:m и
векторов а1, а2... аm называется выпуклой, если λi ≥0, i ?1:m и ![]()
Множество, содержащее все возможные выпуклые комбинации точек некоторого множества М, называют выпуклой оболочкой данного множества. Можно показать, что выпуклая оболочка множества М является наименьшим выпуклым множеством, содержащим М.
Выпуклая оболочка конечного множества точек называется выпуклым многогранником, а непустое пересечение конечного числа замкнутых полупространств — многогранным выпуклым множеством. В отличие от выпуклого многогранника последнее может быть неограниченным.
Точка v выпуклого множества V называется его угловой (крайней) точкой, если она не является внутренней точкой ни для какого отрезка, концы которого принадлежат множеству V. Угловые точки выпуклого многогранника являются его вершинами, а сам он — выпуклой оболочкой своих вершин.
Множество К называется конусом с вершиной в точке x0, если x0 ? К , и из того, что некоторая точка х принадлежит К ( х ? К ), следует, что в К содержится и луч, начинающийся в х0 и проходящий через х, т. е.
![]()
или
![]()
Выпуклая оболочка конечного множества лучей, исходящих из одной точки, называется многогранным выпуклым конусом с вершиной в данной точке.
1.4 Математические основы решения задачи линейного программирования графическим способом 1.4.1 Математический аппаратДля понимания всего дальнейшего полезно знать и представлять себе геометрическую интерпретацию задач линейного программирования, которую можно дать для случаев n = 2 и n = 3.
Наиболее наглядна эта интерпретация для случая n = 2, т.е. для случая двух переменных x1 и x2. Пусть нам задана задача линейного программирования в стандартной форме
 1.5)
1.5)
![]()
Возьмём на плоскости декартову систему координат и каждой паре чисел (x1,x2)поставим в соответствие точку на этой плоскости.
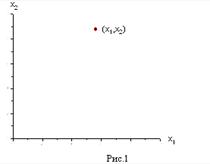
Обратим прежде всего внимание на ограничения x1 ≥0 и x2 ≥ 0. Они из всей плоскости вырезают лишь её первую четверть (см. рис. 1). Рассмотрим теперь, какие области соответствуют неравенствам вида a1 x1 + a2 x2 ≤ b. Сначала рассмотрим область, соответствующую равенству a1 x1 + a2 x2 = b. Как Вы, конечно, знаете, это прямая линия. Строить её проще всего по двум точкам.
Пусть b ≠ 0. Если взять x1 = 0, то получится x2 = b/a2. Если взять x2 = 0, то получится x1 = b/a1. Таким образом, на прямой лежат две точки (0, b/a2) и (b/a1, 0). Дальше через эти две точки можно по линейке провести прямую линию (рисунок 2).
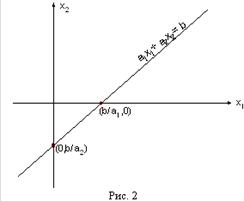
Если же b=0, то на прямой лежит точка (0,0). Чтобы найти другую точку, можно взять любое отличное от нуля значение x1 и вычислить соответствующее ему значение x2.
Эта построенная прямая разбивает всю плоскость на две полуплоскости. В одной её части a1x1 + a2x2 < b, а в другой наоборот a1x1 + a2x2 > b. Узнать, в какой полуплоскости, какой знак имеет место проще всего посмотрев, какому неравенству удовлетворяет какая-то точка плоскости, например, начало координат, т.е. точка (0,0).
1.4.2 Геометрическая интерпретация задачи линейного программированияРассмотрим задачу ЛП в стандартной форме записи:
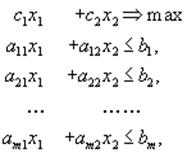
max f(X) = с1х1 + с2х2 + ... + спхп (*)
при ограничениях
|
а21х1 + а22х2 + … + а2nхn≤b2
……………………………..
|
хj ≥ 0, j = 1, 2, …, n.
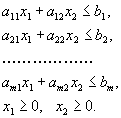
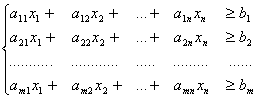
Рассмотрим эту задачу на плоскости, т.е. при п = 2. Пусть система неравенств (**), (***) совместна (имеет хотя бы одно решение):
а11х1 + а12х2 ≤b1
а21х1 + а22х2 ≤b2
…………..
аm1х1 + аm2х2 ≤bm
x1 ≥ 0; х2 ≥ 0.
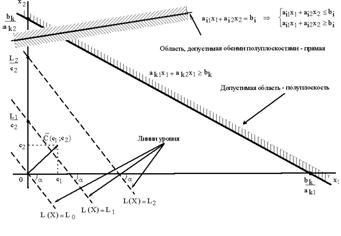
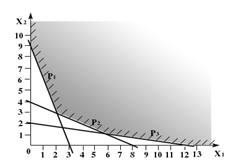
![]() Каждое неравенство этой системы геометрически определяет полуплоскость с граничной прямой аi1х1 + аi2х2 ≤bi i = 1, m. Условия неотрицательности определяют полуплоскости соответственно с граничными прямыми x1 = 0; х2 = 0.. Система совместна, поэтому полуплоскости, как выпуклые множества, пересекаясь, образуют общую часть, которая является выпуклым множеством и представляет собой совокупность точек, координаты каждой из которых составляют решение данной системы. Совокупность этих точек называют многоугольником решений. Это может быть точка, отрезок, луч, замкнутый многоугольник, неограниченная многоугольная область.
Каждое неравенство этой системы геометрически определяет полуплоскость с граничной прямой аi1х1 + аi2х2 ≤bi i = 1, m. Условия неотрицательности определяют полуплоскости соответственно с граничными прямыми x1 = 0; х2 = 0.. Система совместна, поэтому полуплоскости, как выпуклые множества, пересекаясь, образуют общую часть, которая является выпуклым множеством и представляет собой совокупность точек, координаты каждой из которых составляют решение данной системы. Совокупность этих точек называют многоугольником решений. Это может быть точка, отрезок, луч, замкнутый многоугольник, неограниченная многоугольная область.
Если в системе ограничений (**) - (***) n = 3, то каждое неравенство геометрически представляет полупространство трехмерного пространства, граничная плоскость которого аi1х1 + аi2х2 + аi3х1 ≤bi, а условия неотрицательности — полупространства с граничными плоскостями соответственно xi = 0 (i = 1, 2, 3). Если система ограничений совместна, то эти полупространства, как выпуклые множества, пересекаясь, образуют в трехмерном пространстве общую часть, которая называется многогранником решений.
![]()
![]() Пусть в системе (**) - (***) п > 3, тогда каждое неравенство определяет полупространство n-мерного пространства с граничной гиперплоскостью аi1х1 + аi2х2 + … + аinхn ≤bi i = 1, т , а условия неотрицательности — полупространства с граничными гиперплоскостями xj = 0, j = 1, n.
Пусть в системе (**) - (***) п > 3, тогда каждое неравенство определяет полупространство n-мерного пространства с граничной гиперплоскостью аi1х1 + аi2х2 + … + аinхn ≤bi i = 1, т , а условия неотрицательности — полупространства с граничными гиперплоскостями xj = 0, j = 1, n.
Если система ограничений совместна, то по аналогии с трехмерным пространством она образует общую часть n-мерного пространства, называемую многогранником решений, так как координаты каждой его точки являются решением.
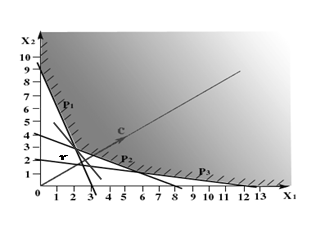
Таким образом, геометрически задача линейного программирования представляет собой отыскание такой точки многогранника решений, координаты которой доставляют линейной функции минимальное значение, причем допустимыми решениями служат все точки многогранника решений.
1.4.3 Этапы решения графического метода задач линейного программированияГрафический метод основан на геометрической интерпретации задачи линейного программирования и применяется в основном при решении задач двумерного пространства и только некоторых задач трехмерного пространства, так как довольно трудно построить многогранник решений, который образуется в результате пересечения полупространств. Задачу пространства размерности больше трех изобразить графически вообще невозможно.
Пусть задача линейного программирования задана в двумерном пространстве, т. е. ограничения содержат две переменные.
Если в ЗЛП ограничения заданы в виде неравенств с двумя переменными, она может быть решена графически. Графический метод решения ЗЛП состоит из следующих этапов.
Этап 1.
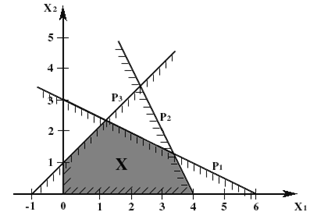
Сначала на координатной плоскости x1Ox2 строится допустимая многоугольная область (область допустимых решений, область определения), соответствующая ограничениям:
 1.6)
1.6)
Не приводя строгих доказательств, укажем те случаи, которые тут могут получится.
Похожие работы
... . 1.3. Построение ограничений и градиента целевой функции : 1.4. Область допустимых решений – отрезок AB. 1.5. Точка А – оптимальная. Координаты т. А: ; ; . 2. Решение задачи линейного программирования симплекс-методом. Прямая задача. Задачу линейного программирования для любой вершины в компактной форме можно представить в виде: Для получения используем алгоритм, приведённый в ...
... игр, теория массового обслуживания, и др. 1. ПОСТАНОВКА ЗАДАЧИ Целью нашего курсового проекта является решение задачи линейного программирования графическим методом. 1.1 Математическое программирование. Математическое программирование ("планирование") – это раздел математики, занимающийся разработкой методов отыскания экстремальных значений функции, на аргументы которой наложены ...
... положит в такой симплекс-таблице текущие базисные переменные равными Ai,0, а свободные - нулю, то будет получено оптимальное решение. Практика применения симплекс метода показала, что число итераций, требуемых для решения задачи линейного программирования обычно колеблется от 2m до 3m, хотя для некоторых специально построенных задач вычисления по правилам симплекс метода превращаются в прямой ...
... ограничения несовместны, множество планов пусто и задача ЛП решения не имеет. Рис. 1.4 Рис. 1.5 Рис. 1.6 2. Симплекс-метод 2.1 Идея симплекс-метода Рассмотрим универсальный метод решения канонической задачи линейного программирования , , , с n переменными и m ограничениями-равенствами, известный как симплекс-метод. Множество планов канонической задачи – ...
0 комментариев