Навигация
Закон сохранения механической энергии
10355
знаков
0
таблиц
4
изображения
1. Закон сохранения механической энергии
При преобразовании энергии внешних сил в энергию внутренних сил и обратно имеет место закон сохранения энергии, который может быть сформулирован следующим образом:
Когда упругое тело (система) под влиянием какой-либо нагрузки переходит из недеформированного состояния в деформированное уравновешенное состояние, то суммарная работа, произведенная в этом процессе внешними и внутренними силами, равна нулю
A+W=0, (15)
где А — работа внешних сил (положительная при нагружении);
W — работа внутренних сил (отрицательная при нагружении). Учитывая, что W = — U уравнение [15] можно заменить равенством
A=U (16)
где U — потенциальная энергия деформации.
Этот закон сохраняет свою силу при медленном (статическом) нагружении и при упругих деформациях.
При динамическом нагружении и при появлении пластических деформаций часть энергии внешних сил преобразуется в кинетическую энергию движения тела, в электромагнитную, тепловую, и другие виды энергии.
Закон сохранения энергии предоставляет в наше распоряжение одно уравнение, пользуясь которым можно определить одно неизвестное, например, перемещение по направлению внешней силы, или неизвестное усилие в одном из стержней.
2. Закон минимума потенциальной энергии деформации (принцип наименьшей работы)
Широкое применение в расчетах конструкций имеет также следующий энергетический закон, называемый принципом наименьшей работы:
Действительное напряженное состояние равновесия упругого тела (системы) отличается от всех смежных состояний равновесия тем, что оно дает минимум потенциальной энергии деформации.
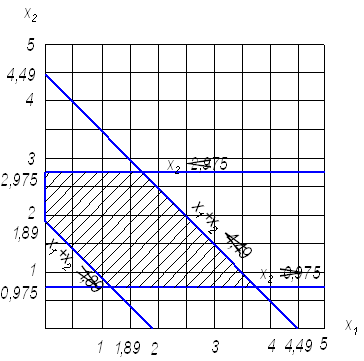
Поэтому если потенциальная энергия деформации зависит от неизвестных величин, например, усилий Хъ Х2 и т. д., то можно определить все эти неизвестныеиз условий минимума энергии
![]()
![]() … (17)
… (17)
Принцип наименьшей работы справедлив для линейно-деформируемых (т. е. подчиняющихся закону Гука) упругих тел и систем. Он предоставляет в наше распоряжение любое, нужное нам число уравнений (и при том, линейных) для определения искомых неизвестных величин.
В следующем параграфе показывается применение этого принципа к расчету простейших статически-неопределимых систем.
О других свойствах механической энергии будет сказано далее, в соответствующих местах курса.
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ ПРИ РАСТЯЖЕНИИ И СЖАТИИ
Имеется много конструкций, в элементах которых усилия не могут быть определены только из уравнений равновесия.
Такие конструкции (системы) называются статически неопределимыми.
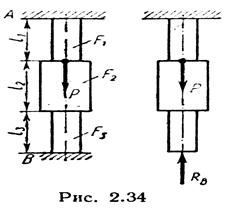
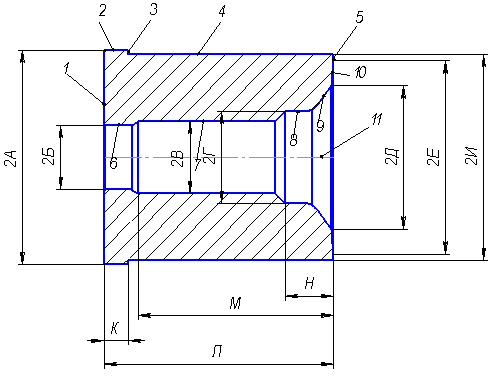
Рассмотрим, например, стержень, изображенный на рис. 4. Нагрузка Р воспринимается частично верхней заделкой и частично нижней. Для определения двух реакций, возникающих в заделках, можно использовать только одно уравнение равновесия: равенство нулю суммы проекций всех сил на вертикальную ось. Остальные два уравнения равновесия обращаются в тождества.
Поскольку неизвестных — два, а уравнение равновесия — одно, то потребуется составить одно рис 4 дополнительное уравнение, рассматривая деформации стержня или перемещения его сечений. Такие системы называются системами один раз (однажды) статически неопределимыми.
Системы, требующие составления двух уравнений перемещений, называются дважды статически неопределимыми и т. д.
Для решения рассматриваемой задачи поступим следующим образом.
Отбросим одну заделку, например нижнюю, заменив ее действие на стержень неизвестной реакцией.
В полученной таким образом системе (обычно ее называют основной системой) приравняем нулю перемещение нижнего сечения, так как в заданной системе это сечение заделано и перемещаться не может.
От действия силы Rb сечение В будет перемещаться вверх в результате укорочения всего стержня, а от действия силы Р — вниз в результате удлинения верхней части стержня длиной 1Ъ так как сила Р при отброшенной нижней заделке передается на верхнюю заделку только через эту часть стержня.
Для определения деформаций используем закон Гука. Так как площадь сечения стержня разная на различных участках, то деформацию определяем по частям.
Уравнение перемещений имеет вид
![]()
Первые три члена представляют собой перемещение вверх сечения В под действием силы RB, четвертый член — перемещение вниз сечения В от действия силы Р. Из этого уравнения находим RB, после чего определение продольных сил в сечениях производится без затруднений по методу сечений, как показано в предыдущих параграфах.
Литература
1 Феодосьев В.И. Сопротивление материалов. 2002
2 Беляев Н.М. Сопротивление материалов. 1999
3 Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем. 1991
4 Работнов Ю.Н. Механика деформируемого твердого тела. 2004
5 Степин П.А. Сопротивление материалов. 1990
Похожие работы
... закон пластического течения. ГЛАВА II. ЗАДАЧА УПРУГОПЛАСТИЧЕСКОГО ДЕФОРМИРОВАНИЯ ТРУБЫ 2.1 Механическая постановка задачи Рассмотрим упругопластическое состояние трубы радиусов , находящейся под действием внутреннего давления , в случае плоской деформации. Цель данной задачи – определить выражения для компонент напряжений, скоростей перемещений и скоростей деформации. Методом ...
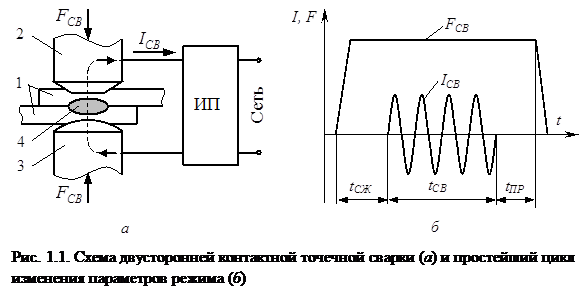
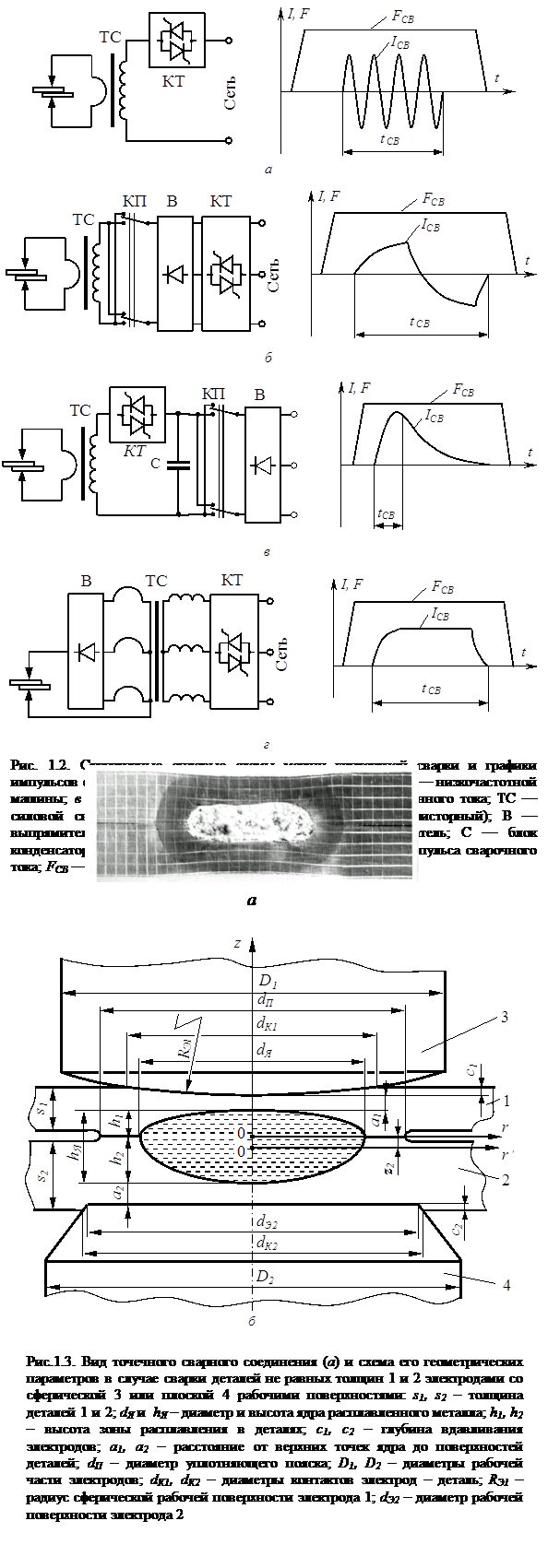
... , при обработке металлов давлением. Экспериментальные исследования процессов пластической деформации металла в зоне формирования соединения при контактной точечной сварке по этой методике проводятся на натурных образцах с предварительно нанесенной координатной сеткой, технология изготовления которых предложена и описана в работе [128]. При исследованиях пластических деформаций в плоскостях ...
... (мин). Штучное время: Тшт=То+Твсп.неп+Ттех+Торг+Тотд (12) Тшт=0,08+0,76+0,008+0,013+0,05=0,91 (мин). 3. ОБОСНОВАНИЕ ТЕХНИЧЕСКОЙ ХАРАКТЕРИСТИКИ СТАНКА 3.1 Обоснование бесцентровой обработки Обработка коленчатого вала на станке NAGEL проводится в центрах, вал вращается с помощью поводкового патрона. Зажимные рычаги имеют возможность перемещаться в радиальном направлении и, по сути, ...
... места, оборудования и выполняемых технологических операций Обработка детали ''вставка нижняя'' производится на производственном участке по изготовлению штампов для холодной объемной штамповки. Таблица 3.1.1 Описание технологического процесса и оборудование производственного участка N оп Наименование операции Наименование оборудования Работы, выполняемые на этом оборудовании 05 ...
0 комментариев